
경쟁 연결: 전환점 - 블록 기반
로봇 기능
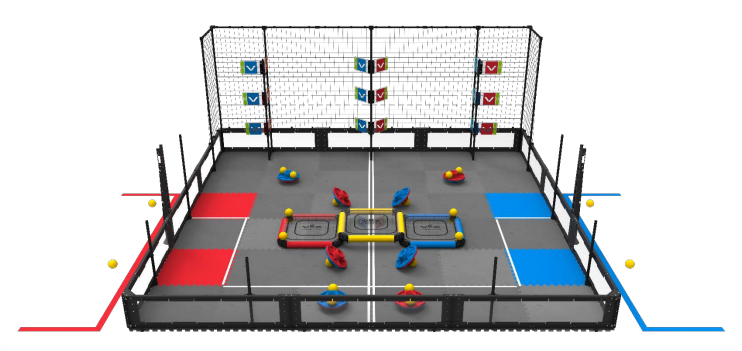
2018~2019년 VEX 로봇 경연대회 게임 Turning Point에서는 플레이어가 다른 게임 요소 사이에서 플래그를 전환해야 했습니다. 깃발은 총 9개였습니다. 로봇이 움직일 수 있는 아래쪽 깃발 3개와 경쟁용 공놀이 조각으로 치면 움직일 수 있는 위쪽 깃발 6개였습니다. 경쟁팀은 공 발사기를 이용해 더 높은 깃발을 맞추는 방법을 생각해내야 했습니다. 상상해 보세요. 로봇이 공놀이 조각을 이용해 깃발을 치도록 프로그래밍하는 것이 항상 정확하지는 않을 수도 있습니다. 로봇이 자율 주행 중에 잘못된 방향으로 한 번만 돌면 계산이 틀어져 플래그가 하나도 맞지 않을 가능성이 있습니다. 마찬가지로, 운전 기술 챌린지의 경우, 팀이 공을 제대로 던질 수 있을 만큼 로봇을 수동으로 정렬하는 것이 어려울 수 있습니다.
VEX 로봇 경연 대회 게임은 종종 다양한 색상의 게임 요소를 사용하므로, 비전 센서가 있는 로봇을 설계하는 것이 큰 이점이 될 것입니다. 예를 들어, Turning Point 게임에서 비전 센서를 사용하여 깃발을 감지한 다음 로봇을 올바르게 정렬하여 정확한 사격을 할 수 있었습니다. 비전 센서는 다양한 환경의 조명에 민감하다는 점을 기억하는 것이 중요합니다. 경쟁 환경에서는 비전 센서를 조정할 시간이 있으며, 비전 센서 조정은 팀이 채택해야 할 중요한 관행입니다.
![]() 학습을 확장하세요
학습을 확장하세요
이 활동을 확장하려면 학생들에게 로봇이 이 경쟁 게임에 사용할 수 있는 감지된 노란색 물체를 향해 이동하는 프로젝트를 설계하고 구성해 보라고 하세요!
학생들에게 다음을 하도록 하세요.
-
Clawbot(Drivetrain, No Gyro) 예제 프로젝트를 엽니다.
-
비전 센서를 프로그래밍할 때 Detecting Objects (Vision) 예제 프로젝트를 참고하세요.
-
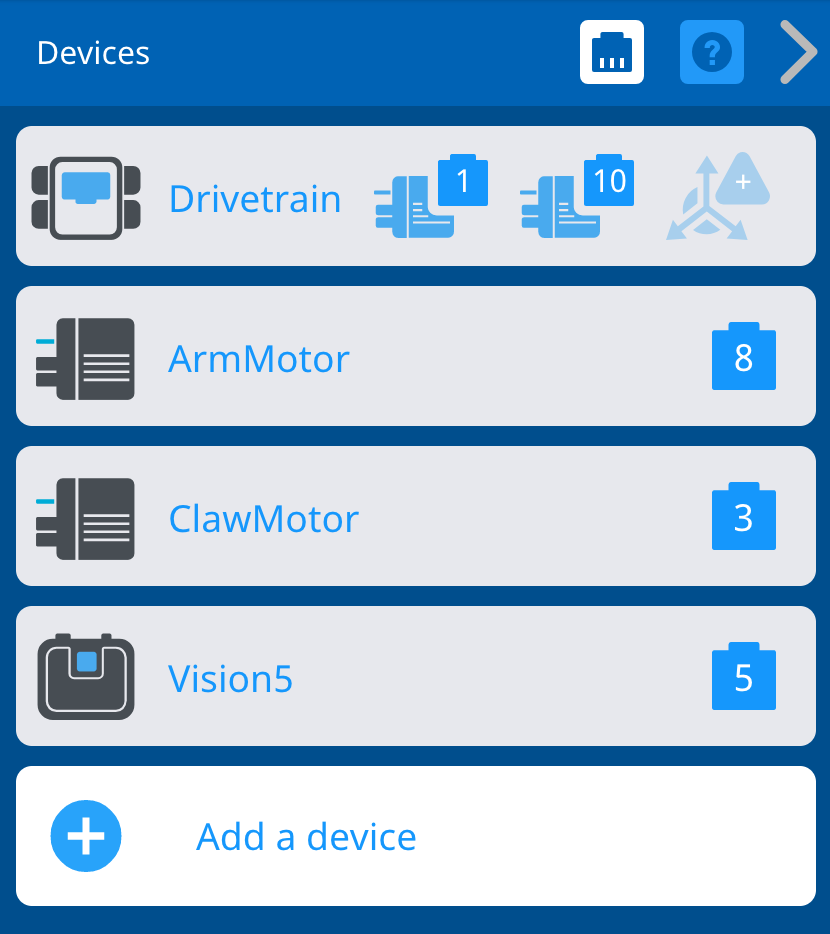
Clawbot(구동계, 자이로 없음) 구성에 비전 센서를 추가한 다음 비전 센서가 빨간색과 파란색 물체를 감지하도록 구성합니다. 자세한 내용은 비전 센서 구성 튜토리얼을 참조하거나를하세요.
- 감지된 물체를 향해 클로봇을 이동하도록 프로그래밍합니다. 클로봇은 마치 깃발을 흔들듯이 팔을 들어올리도록 프로그래밍할 수도 있습니다!
- VRC Turning Point 게임에서 노란색 공과 같은 노란색 물체를 Vision Sensor가 감지할 수 있는지 확인하기 위해를 다운로드하고 실행합니다. 비전 센서가 물체를 감지할 수 있다면, 로봇은 감지된 물체에 따라 움직일까요? 도움이 필요하면 프로젝트 다운로드 및 실행 튜토리얼 비디오를 시청하세요.
- 시간이 허락한다면 Turning Point 경기장과 비슷한 게임 경기장을 마련하세요. 비전 센서를 사용해 로봇이 움직여 점수를 획득하는 연습을 해보세요!