
প্রতিযোগিতা সংযোগ: টার্নিং পয়েন্ট - ব্লক-ভিত্তিক
রোবট ক্ষমতা
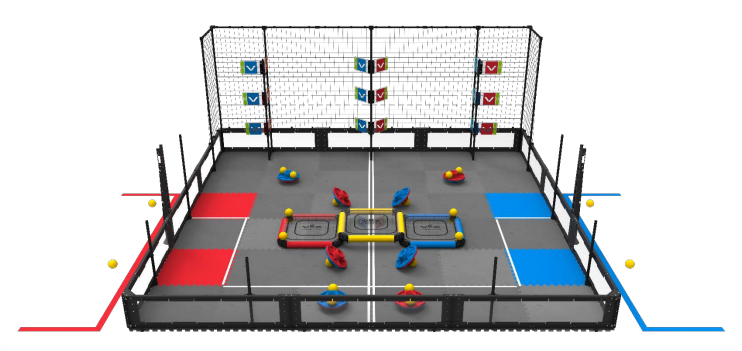
২০১৮-২০১৯ সালের VEX রোবোটিক্স প্রতিযোগিতার খেলা টার্নিং পয়েন্টে খেলোয়াড়দের অন্যান্য খেলার উপাদানগুলির মধ্যে পতাকা টগল করতে হত। মোট নয়টি পতাকা ছিল: তিনটি নীচের পতাকা যা রোবট দ্বারা টগল করা যেত, এবং ছয়টি উঁচু পতাকা যা কেবল প্রতিযোগিতার বলের খেলার টুকরো দিয়ে আঘাত করে টগল করা যেত। প্রতিযোগী দলগুলিকে বল লঞ্চার ব্যবহার করে উঁচু পতাকায় আঘাত করার একটি উপায় খুঁজে বের করতে হবে। যদি আপনি কল্পনা করতে পারেন, বল খেলার টুকরো ব্যবহার করে পতাকা আঘাত করার জন্য রোবটটিকে প্রোগ্রামিং করা সবসময় সঠিক নাও হতে পারে। স্বায়ত্তশাসিত সময়ের মধ্যে যদি রোবটটি একটি ভুল মোড় নেয়, তাহলে গণনা বন্ধ হয়ে যাওয়ার কারণে কোনও পতাকাই আঘাত না করার সম্ভাবনা রয়েছে। একইভাবে, ড্রাইভিং স্কিলস চ্যালেঞ্জের ক্ষেত্রে, দলগুলির পক্ষে রোবটটিকে সঠিকভাবে লঞ্চ করার জন্য ম্যানুয়ালি লাইন আপ করা কঠিন হতে পারে।
VEX রোবোটিক্স প্রতিযোগিতার গেমগুলিতে প্রায়শই বিভিন্ন রঙের গেম উপাদান ব্যবহার করা হয় এবং তাই, একটি দুর্দান্ত সুবিধা হবে ভিশন সেন্সর সহ একটি রোবট ডিজাইন করা। উদাহরণস্বরূপ, টার্নিং পয়েন্ট গেমটিতে, একটি ভিশন সেন্সর ব্যবহার করা যেতে পারে পতাকা সনাক্ত করতে এবং তারপর সঠিক শট নেওয়ার জন্য রোবটটিকে সঠিকভাবে সারিবদ্ধ করতে। এটা মনে রাখা গুরুত্বপূর্ণ যে ভিশন সেন্সরগুলি বিভিন্ন পরিবেশে আলোর প্রতি সংবেদনশীল। প্রতিযোগিতার পরিবেশে, ভিশন সেন্সর টিউন করার সময় থাকে এবং ভিশন সেন্সর টিউন করা একটি গুরুত্বপূর্ণ অনুশীলন যা দলগুলির গ্রহণ করা উচিত।
![]() তোমার শেখার পরিধি বাড়াও
তোমার শেখার পরিধি বাড়াও
এই কার্যকলাপটি সম্প্রসারিত করার জন্য, আপনার শিক্ষার্থীদের এমন একটি প্রকল্প ডিজাইন এবং রূপরেখা তৈরি করতে বলুন যাতে রোবটটি সনাক্ত করা হলুদ বস্তুর দিকে এগিয়ে যাবে যা তারা এই প্রতিযোগিতামূলক খেলার জন্য সম্ভাব্যভাবে ব্যবহার করতে পারে!
আপনার শিক্ষার্থীদের নিম্নলিখিতগুলি করতে বলুন:
-
Clawbot (Drivetrain, No Gyro) উদাহরণ প্রকল্পটি খুলুন।
-
ভিশন সেন্সর প্রোগ্রাম করার সময় রেফারেন্স হিসেবে ডিটেকিং অবজেক্টস (ভিশন) উদাহরণ প্রকল্পটি ব্যবহার করুন।

-
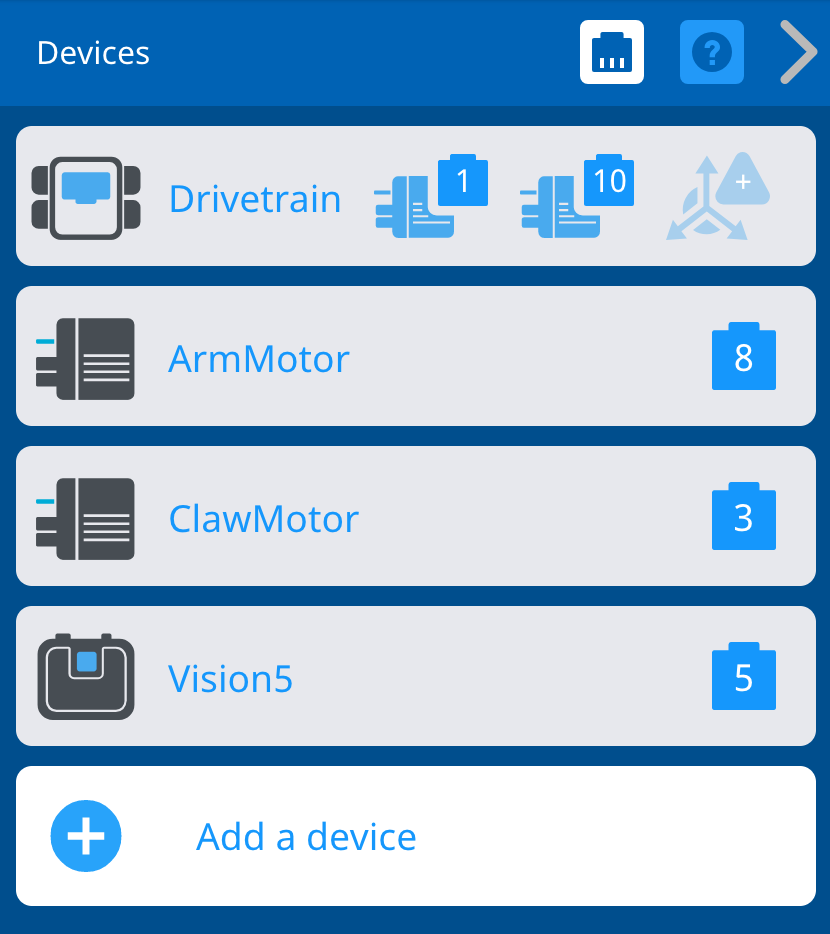
Clawbot (Drivetrain, No Gyro) কনফিগারেশনে ভিশন সেন্সর যোগ করুন এবং তারপর লাল এবং নীল বস্তু সনাক্ত করার জন্য ভিশন সেন্সর কনফিগার করুন। আরও তথ্যের জন্য "ভিশন সেন্সর কনফিগারিং" টিউটোরিয়ালটি দেখুন অথবা এখানেক্লিক করুন।
- সনাক্তকৃত বস্তুর দিকে যাওয়ার জন্য ক্লবটটিকে প্রোগ্রাম করুন। ক্লবটকে এমনভাবে প্রোগ্রাম করা যেতে পারে যেন এটি একটি পতাকা টগল করার জন্য তার হাত উঁচু করে!
- ভিআরসি টার্নিং পয়েন্ট গেমের হলুদ বলের মতো ভিশন সেন্সর হলুদ বস্তু সনাক্ত করতে পারে কিনা তা পর্যবেক্ষণ করতে প্রকল্পটি ডাউনলোড করুন এবংচালান। যদি ভিশন সেন্সর বস্তু সনাক্ত করতে পারে, তাহলে কি রোবটটি সেই সনাক্তকৃত বস্তুর উপর ভিত্তি করে চলাচল করবে? সাহায্যের জন্য, "প্রকল্প ডাউনলোড এবং চালান" টিউটোরিয়াল ভিডিওটি দেখুন।
- যদি সময় থাকে, তাহলে টার্নিং পয়েন্ট মাঠের মতো একটি খেলার মাঠ তৈরি করুন। রোবটটিকে পয়েন্ট অর্জনের জন্য সরানোর অনুমতি দেওয়ার জন্য ভিশন সেন্সর ব্যবহার করে অনুশীলন করুন!