
Competition Connection: Turning Point - แบบใช้บล็อค
ความสามารถของหุ่นยนต์
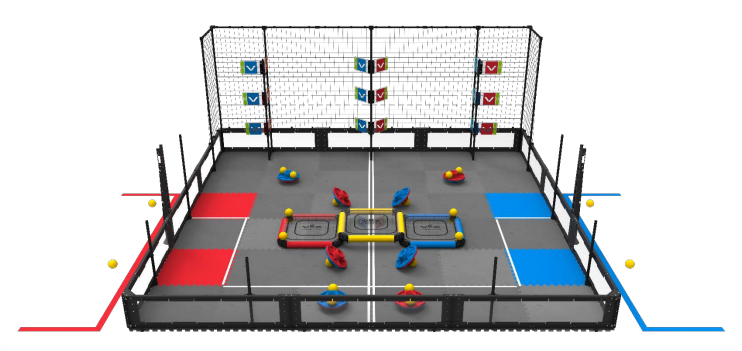
เกมการแข่งขันหุ่นยนต์ VEX Robotics Turning Point ปี 2018 - 2019 กำหนดให้ผู้เล่นต้องสลับธงและองค์ประกอบอื่นๆ ของเกม มีธงทั้งหมด 9 อัน: ธงด้านล่าง 3 อันที่หุ่นยนต์สามารถสลับได้ และธงด้านบน 6 อันที่สลับได้โดยการตีด้วยชิ้นลูกบอลเกมแข่งขันเท่านั้น ทีมแข่งขันต้องคิดหาวิธีที่จะตีธงที่สูงโดยใช้เครื่องยิงลูกบอล หากคุณสามารถนึกภาพได้ การตั้งโปรแกรมหุ่นยนต์ให้ตีธงโดยใช้ชิ้นส่วนของเกมลูกบอลโดยการวัดอาจไม่แม่นยำเสมอไป หากหุ่นยนต์เลี้ยวผิดครั้งหนึ่งในช่วงระยะเวลาการทำงานอัตโนมัติ มีความเป็นไปได้ที่ธงทุกอันจะไม่โดนกระทบ เนื่องจากการคำนวณจะผิดพลาด ในทำนองเดียวกัน สำหรับความท้าทายทักษะการขับขี่ อาจเป็นเรื่องยากสำหรับทีมที่จะจัดตำแหน่งหุ่นยนต์ด้วยตนเองให้เพียงพอที่จะส่งลูกบอลได้อย่างเหมาะสม
เกมการแข่งขันหุ่นยนต์ VEX มักใช้องค์ประกอบเกมที่มีสีต่างกัน ดังนั้น ข้อได้เปรียบที่ยอดเยี่ยมคือการออกแบบหุ่นยนต์ที่มีเซ็นเซอร์ภาพ ตัวอย่างเช่น ในเกม Turning Point อาจมีการใช้ Vision Sensor เพื่อตรวจจับธงและจัดตำแหน่งหุ่นยนต์ให้เหมาะสมเพื่อให้ยิงได้แม่นยำ สิ่งสำคัญที่ต้องทราบคือเซ็นเซอร์วิชั่นมีความไวต่อแสงในสภาพแวดล้อมที่แตกต่างกัน ในการแข่งขันนั้นจะต้องมีการปรับแต่ง Vision Sensor และการปรับแต่ง Vision Sensor ก็เป็นแนวทางปฏิบัติสำคัญที่ทีมต่างๆ ควรนำไปปฏิบัติ
![]() ขยายการเรียนรู้ของคุณ
ขยายการเรียนรู้ของคุณ
เพื่อขยายขอบเขตของกิจกรรมนี้ ให้ขอให้นักเรียนของคุณออกแบบและร่างโครงร่างโครงการที่จะให้หุ่นยนต์เคลื่อนที่ไปหาสิ่งของสีเหลืองที่ตรวจพบ ซึ่งอาจใช้สำหรับเกมการแข่งขันนี้ได้!
ขอให้นักเรียนของคุณทำสิ่งต่อไปนี้:
-
เปิดโครงการตัวอย่าง Clawbot (Drivetrain, No Gyro)
-
ใช้โครงการตัวอย่างการตรวจจับวัตถุ (วิสัยทัศน์) เป็นข้อมูลอ้างอิงเมื่อทำการเขียนโปรแกรมเซ็นเซอร์วิสัยทัศน์
-
เพิ่มเซ็นเซอร์วิชั่นลงในการกำหนดค่า Clawbot (ระบบส่งกำลัง ไม่มีไจโร) จากนั้นกำหนดค่าเซ็นเซอร์วิชั่นเพื่อตรวจจับวัตถุสีแดงและสีน้ำเงิน ดูที่บทช่วยสอนการกำหนดค่าเซนเซอร์วิชั่นหรือคลิก ที่นี่ เพื่อดูข้อมูลเพิ่มเติม
- ตั้งโปรแกรมให้ Clawbot เคลื่อนที่ไปยังวัตถุที่ตรวจพบ Clawbot ยังสามารถตั้งโปรแกรมให้ยกแขนขึ้นได้เหมือนกับว่าจะสลับธง!
- ดาวน์โหลดและรันโปรเจ็กต์ เพื่อสังเกตว่า Vision Sensor สามารถตรวจจับวัตถุสีเหลือง เช่น ลูกบอลสีเหลืองในเกม VRC Turning Point ได้หรือไม่ หาก Vision Sensor สามารถตรวจจับวัตถุได้ หุ่นยนต์จะเคลื่อนที่ตามวัตถุที่ตรวจจับได้หรือไม่? หากต้องการความช่วยเหลือ โปรดดูวิดีโอการสอนการดาวน์โหลดและเรียกใช้โครงการ
- หากมีเวลา ให้จัดสนามแข่งขันคล้ายกับสนาม Turning Point ฝึกฝนการใช้ Vision Sensor เพื่อให้หุ่นยนต์เคลื่อนที่เพื่อทำคะแนน!