
Toneelstuk
Deel 1 - Stap voor stap
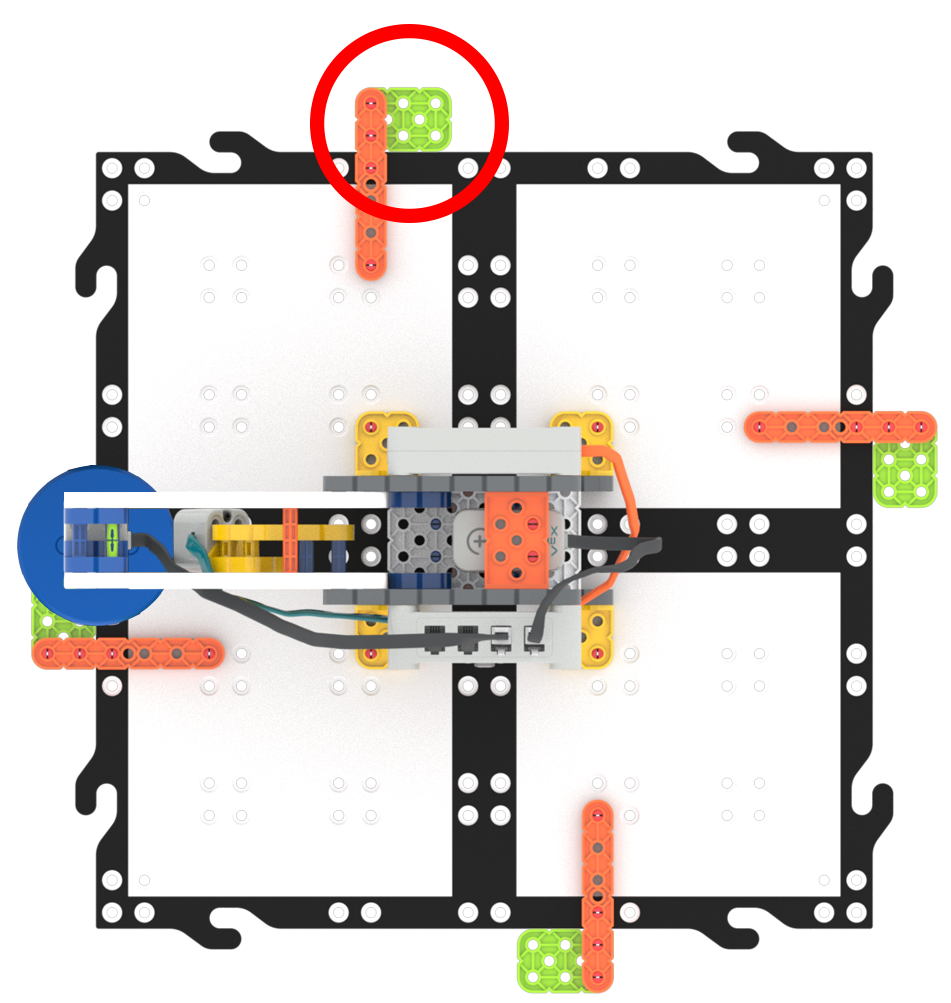
- InstructieGeef de leerlingen de opdracht een project te maken waarbij de robotarm naar elk van de vier groene platen op de tegel beweegt.

Vier groene borden - ModelModelleer voor studenten de stappen om een project te maken dat de robotarm instrueert om naar elk van de vier groene platen op de GO-tegel te bewegen door de basismotor te laten draaien.
- Laat de stappen in het artikel Een project openen en opslaanvoor uw apparaat zien aan studenten. Laat ze vervolgens deze stappen volgen om hun projecten te openen en te maken.
-
Laat de leerlingen hun project opslaan als Lab 3 Deel 1. Als meerdere groepen aan dezelfde apparaten werken, laat ze dan hun naam aan het project toevoegen.

Geef het project een naam - Vervolgens moeten studenten hun robotarm (1-assig) aansluiten op hun apparaat en de robotarm configureren.
Opmerking: Wanneer u uw robotarm voor het eerst op uw apparaat aansluit, kan het zijn dat de in de hersenen ingebouwde gyro wordt gekalibreerd, waardoor de robotarm even zelfstandig beweegt. Dit is normaal gedrag. Raak de robotarm niet aan tijdens het kalibreren.
-
Modelleer de stappen in dit artikel Configureer een robotarm om studenten te begeleiden bij het configureren van hun robotarm.

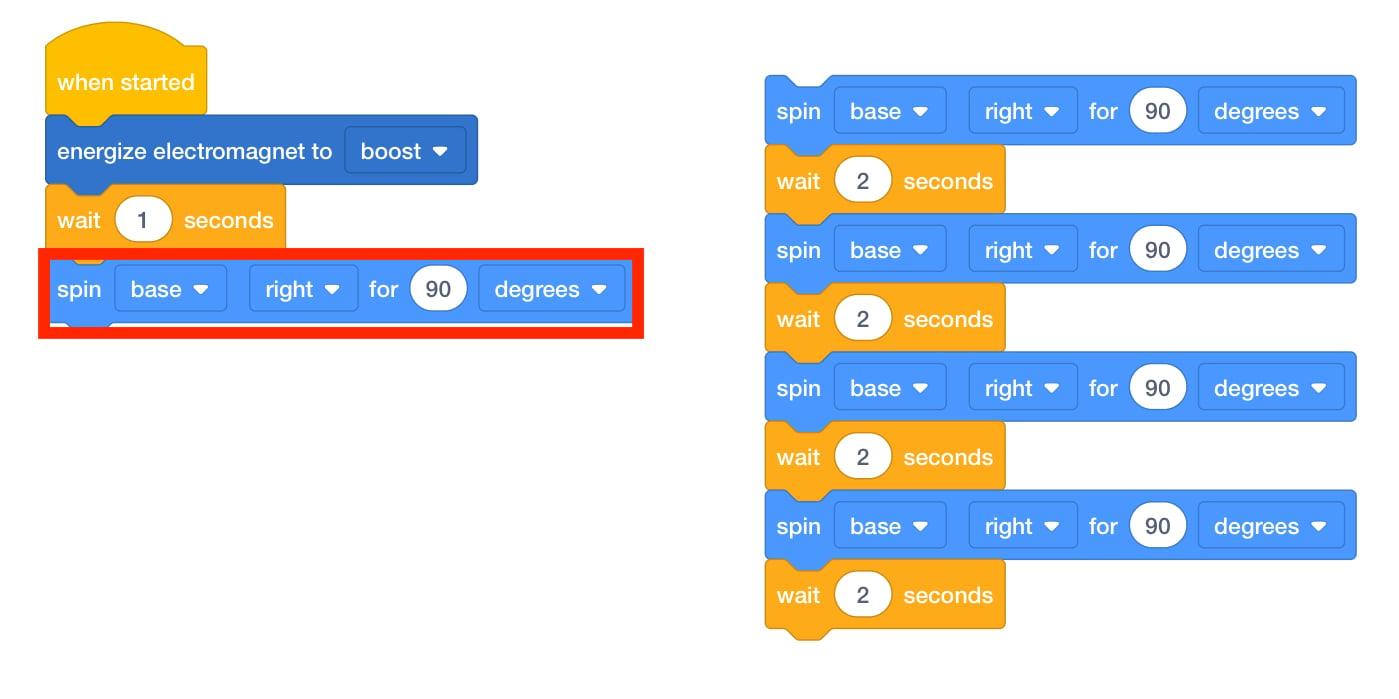
Hersenen verbonden - Laat zien hoe je het [Spin for]-blok aan de werkruimte toevoegt en het aan het {When started} hatblok koppelt. Laat de leerlingen meekijken op een projectiescherm of via de Lab 3-diavoorstelling.

Voeg [Spin voor] blok - Leg de leerlingen uit dat het [Spin for]-blok meerdere motorische opties heeft. Ze gaan alleen de basismotor verplaatsen, dus studenten moeten de naam van de motor selecteren en deze veranderen in 'basis'.
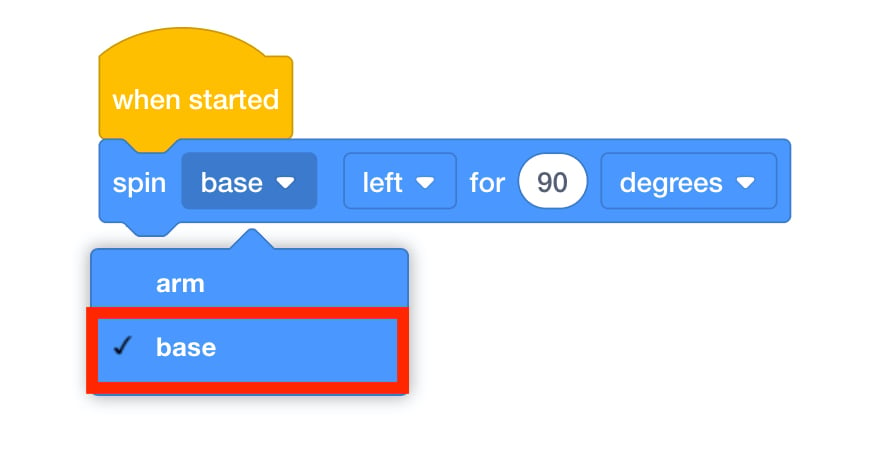
Selecteer 'basis'-motor - Het doel is om de basismotor naar rechts te verplaatsen om de volgende groene plaat te bereiken. Vraag de leerlingen om 'rechts' te selecteren in de volgende keuzelijst. De volgende groene plaat bevindt zich op 90 graden afstand van de huidige locatie, dus de rest van het blok is klaar om te vertrekken.

Selecteer 'rechts' - Wanneer de robotarm de groene plaat bereikt, moeten de leerlingen de robotarm programmeren om te wachten voordat hij naar de volgende locatie gaat. Laat de leerlingen een [Wachten op]-blok toevoegen en laat het 2 seconden wachten.

Voeg [Wacht op] Blok - Laat de leerlingen met het project beginnen en bekijken hoe de robotarm beweegt. Als ze problemen ondervinden bij de overstap naar de eerste Groene Plaat, laat ze dan deze stappen opnieuw doorlopen. Raadpleeg indien nodig het artikel Een project starten in VEXcode GOen modelleer de stappen om een project te starten voor studenten.
- Zodra studenten hun robotarm met succes naar de eerste groene plaat hebben verplaatst, daag je ze uit om dezelfde stappen te volgen en extra blokken toe te voegen, zodat hun robotarm naar alle vier de groene platen beweegt.
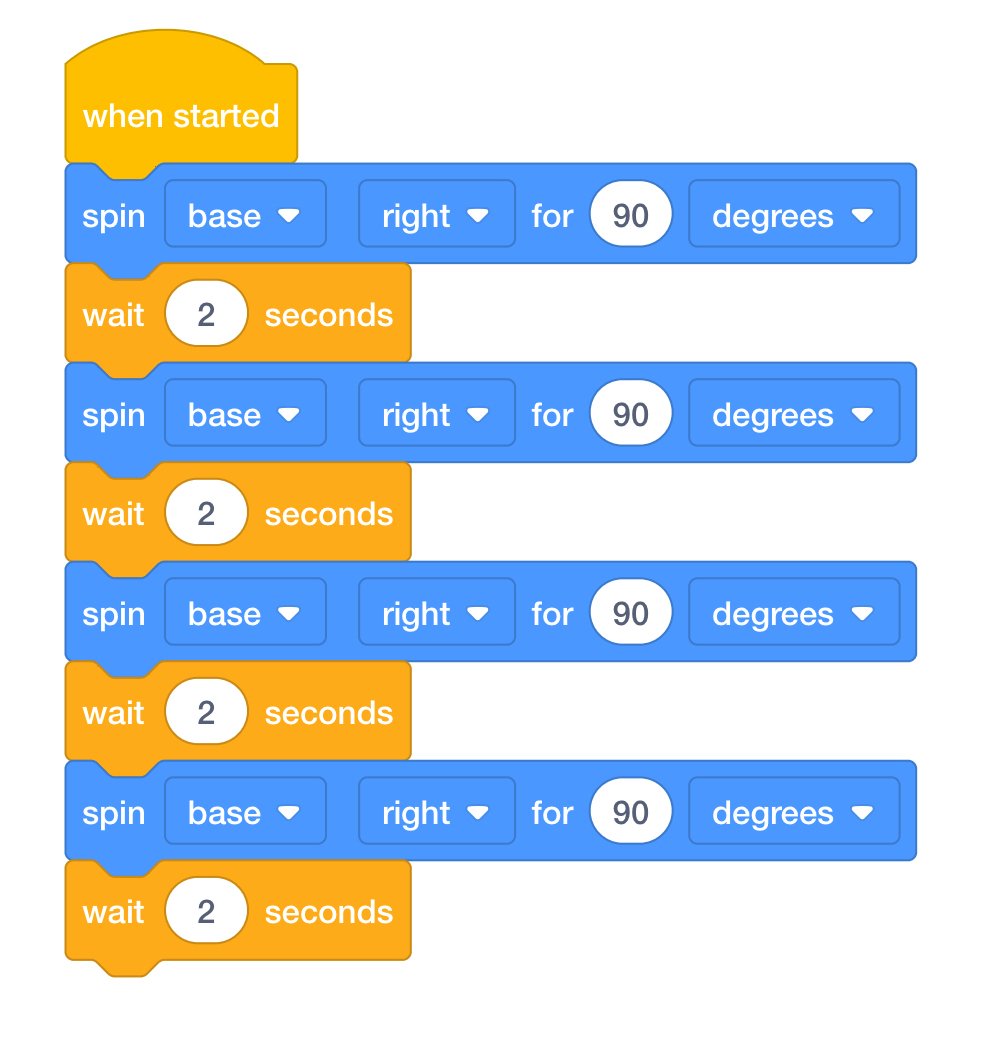
Lab 3 Deel 1 Afgerond Project - FaciliteerFaciliteer een gesprek met studenten over hun project terwijl je de kamer omcirkelt. Stel hen enkele van de volgende vragen om een discussie op gang te brengen.
- Hoeveel extra blokken denk je dat je nodig hebt om je robotarm naar alle vier de groene platen te verplaatsen?
- Wat denk je dat er zou gebeuren als we het blok [Spin for] zouden veranderen in 180 graden? Waar zou de robotarm stoppen met bewegen?
- Als u een schijf wilt verplaatsen terwijl u de robotarm verplaatst, welke andere blokken moet u dan toevoegen?
- Hoe verhouden deze blokken zich tot de stapsgewijze instructies die u voor de gemotoriseerde robotarm hebt gemaakt?
- Herinner groepen eraan om vragen te stellen als ze in de war raken. Niet elke poging zal goed verlopen.
Elke keer dat ze aan het project beginnen, moeten studenten identificeren wat er mis is gegaan en brainstormen over ideeën om het op te lossen.
Trial and error wordt verwacht. Als studenten gefrustreerd zijn en meer hulp nodig hebben, laat ze dan zien hoe ze blokken kunnen dupliceren door met de rechtermuisknop op een blok te klikken of er lang op te drukken.
- VraagVraag leerlingen om terug te denken aan de lijst die ze in Engage hebben gemaakt over de apparaten die ze thuis gebruiken en hoe ze worden bediend.
In deze sectie gebruikten studenten het [Spin for]-blok om een motor te besturen. Hoeveel van deze apparaten hebben volgens hen motoren?
Mid-Play Break & Groepsdiscussie
Zodra elke groep de Robotarm (1-as) naar alle vier de locaties heeft verplaatst, komt u samen voor een kort gesprek.
- Waar worstelde je groep het meest mee bij het bouwen van het project? Wat was het gemakkelijkste deel van het maken van het project?
- Nu gaan we een schijf verplaatsen. Maar deze magneet ziet er anders uit. Wat valt u op aan de elektromagneet in vergelijking met de originele magneet?
- Omdat we onze elektromagneet kunnen bedienen met VEXcode GO, gebruiken we onze elektromagneet en de blokken van Play Part 1 om een nieuw project te maken om schijven van de ene locatie naar de andere te verplaatsen.
Deel 2 - Stap voor stap
- InstrueerInstrueer studenten dat ze hun project gaan herzien om een project te maken waarbij de elektromagneet een schijf oppakt en de schijf op een andere locatie plaatst.
 Een schijf naar een nieuwe locatie
Een schijf naar een nieuwe locatie verplaatsen - Modelmodel dat VEXcode GO lanceert en een project maakt waarbij de robotarm een schijf oppakt en naar rechts beweegt en vervolgens terugkeert naar de beginpositie.
- Laat studenten hun Lab 3 Deel 1-project openen, ze zullen dit gebruiken als basis voor het project in deze sectie.
-
Studenten moeten hun project aan het begin van het lab opslaan. Laat ze "Opslaan als" of "Opslaan op uw apparaat" selecteren (afhankelijk van welke VEXcode GO-versie ze gebruiken) in het FIle-menu en sla hun project op als Lab 3 Part 2. Als meerdere groepen aan dezelfde apparaten werken, laat ze dan hun naam aan het project toevoegen.

Geef het project een naam
-
Als het nog steeds niet is aangesloten, moeten studenten hun robotarm (1-as) op hun apparaat aansluiten. Indien nodig, kunt u de stappen in dit artikel voor de leerlingen modelleren Sluit een VEX GO Brainaan om ze te helpen de hersenen met hun apparaat te verbinden.
 Verbonden met de
Verbonden met de hersenen - Laat leerlingen zien hoe ze blokken van het {When started} blok loskoppelen en de stapel naar de zijkant verplaatsen. Laat leerlingen met je meekijken op een geprojecteerd scherm of via de Lab 3 Slideshow.
- Opmerking: Laat de leerlingen weten dat deze stapel niet zal werken omdat deze niet aan blok {When started} is gekoppeld.
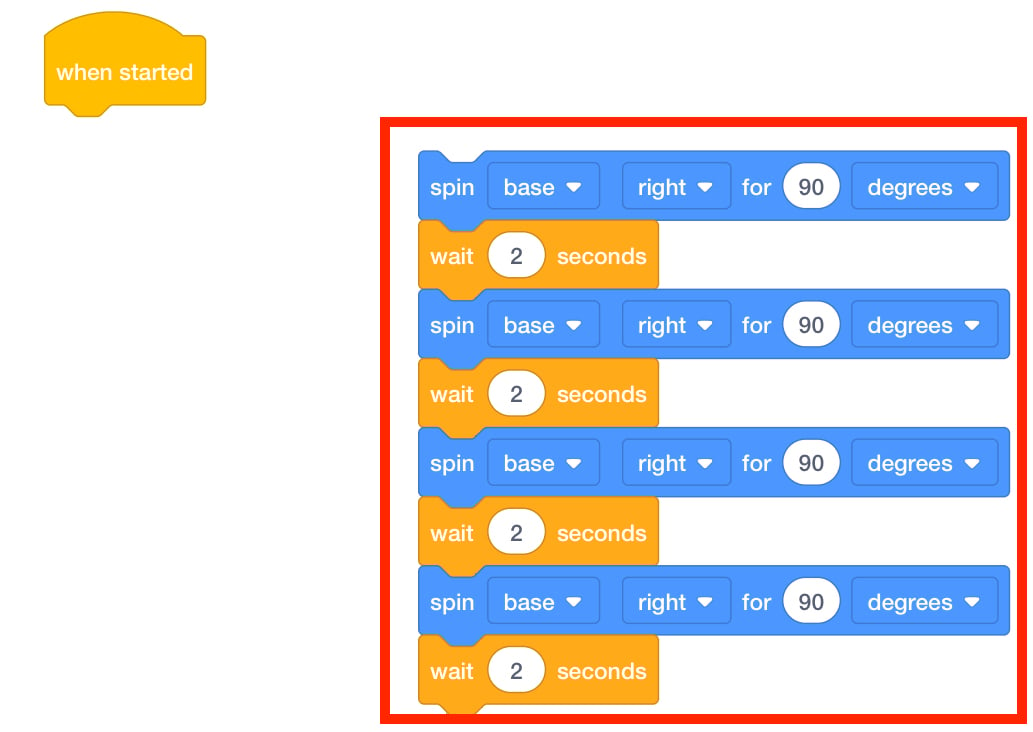
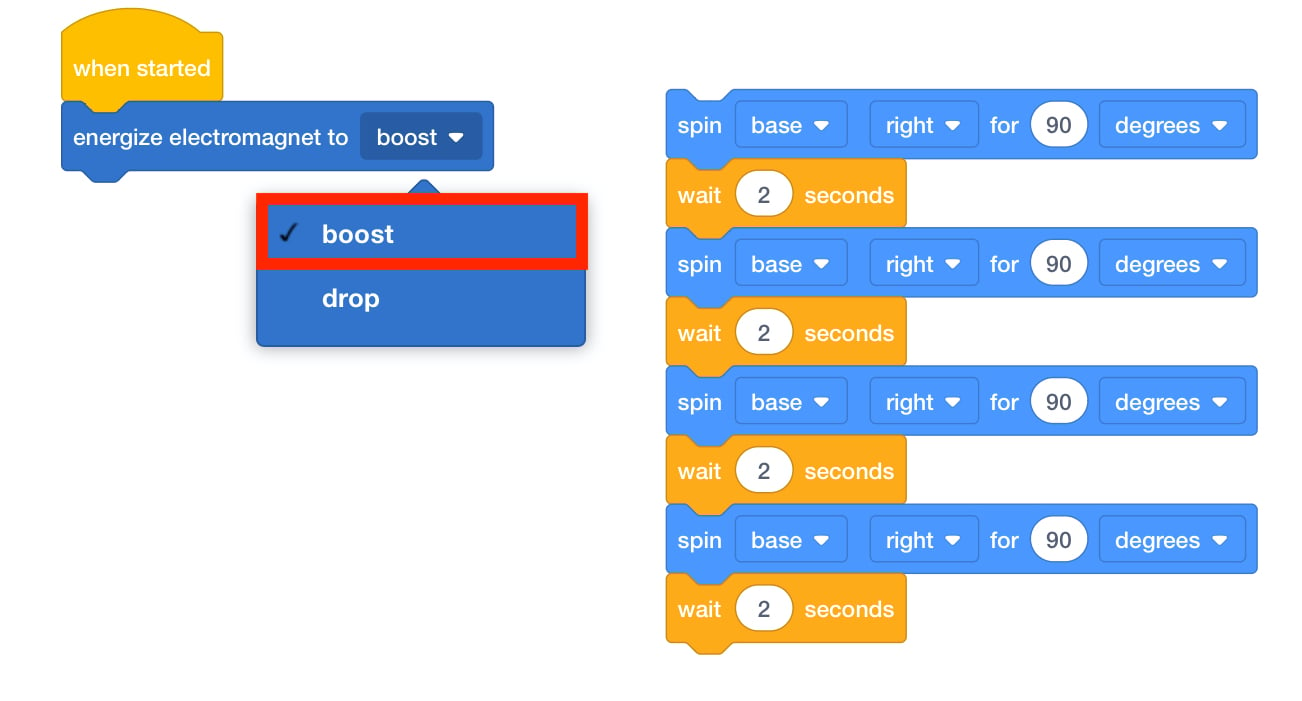
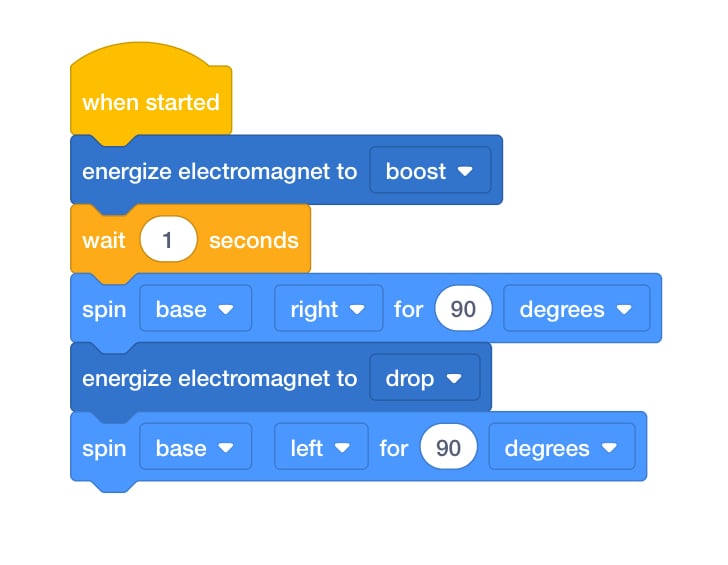
Losgekoppelde blokken worden niet uitgevoerd - Laat leerlingen kennismaken met het [Energize electromagnet] blok. Leg uit dat dit blok controleert of de elektromagneet is ingesteld op "boost" of "drop".
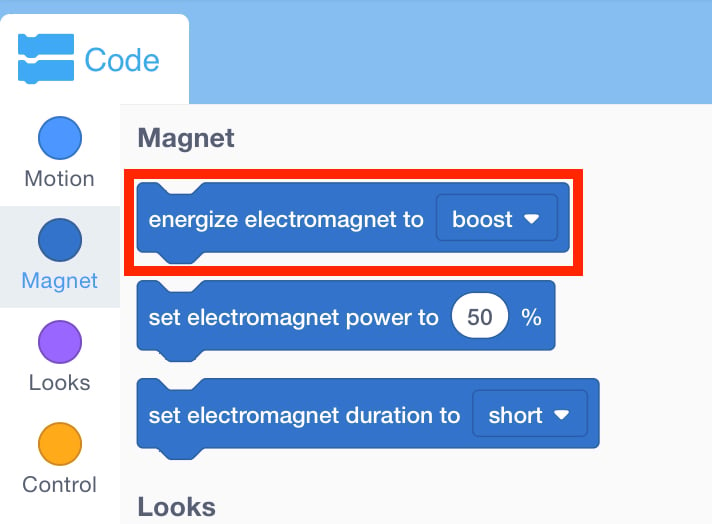
[Elektromagneet inschakelen] Blok - Sleep het [Energize Electromagnet] blok naar de werkruimte en bevestig het aan het {When started} hoedenblok.
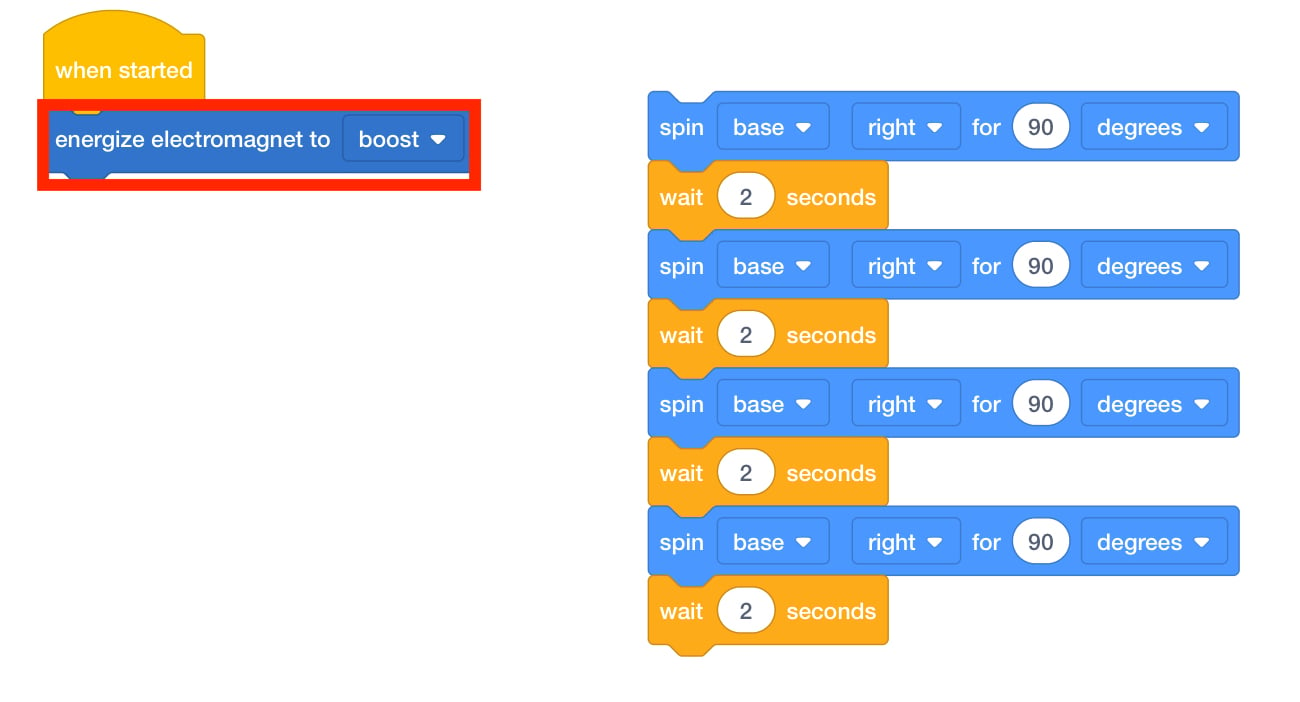
[Elektromagneet inschakelen] blok - Leg aan studenten uit dat het instellen van de elektromagneet op "boost" alle schijven zal aantrekken, zodat ze worden opgepakt. Zorg ervoor dat studenten hun blok hebben ingesteld op "boost", zodat ze de schijf kunnen oppakken.
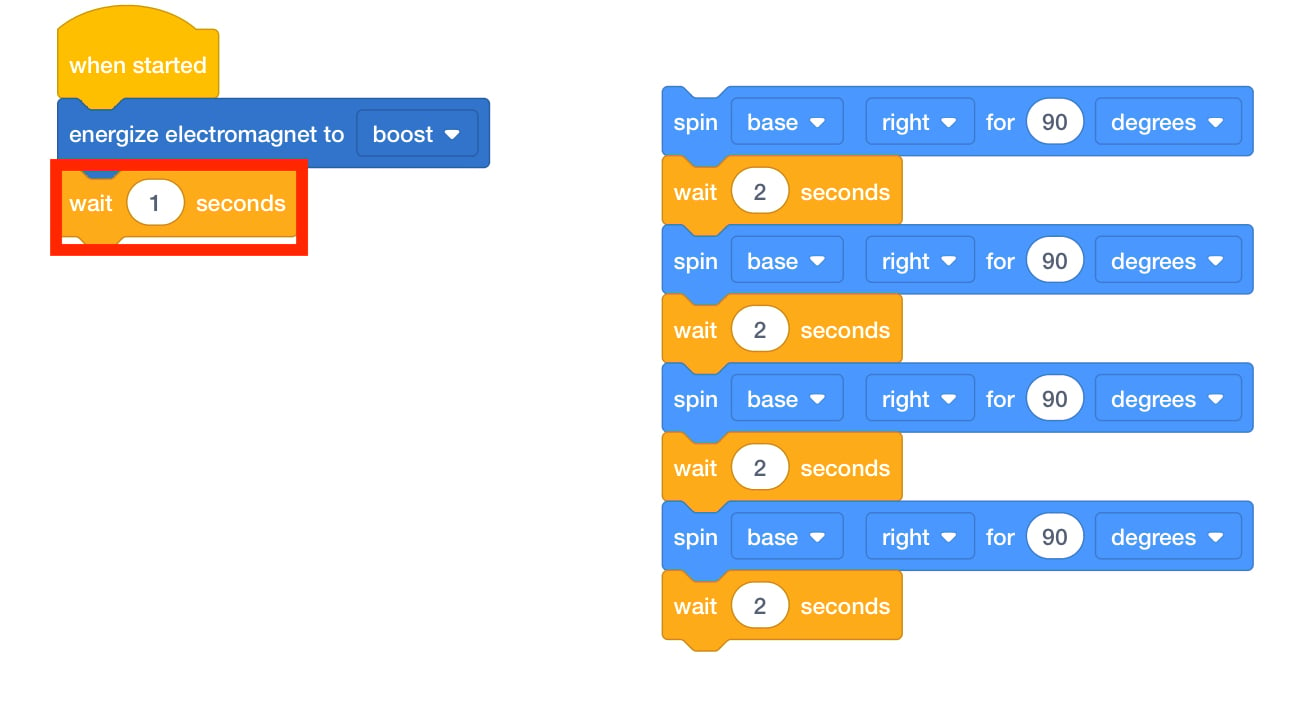
Instellen op Boost - Nu de elektromagneet is ingesteld op "boost", willen studenten er zeker van zijn dat ze tijd hebben om een schijf op te pakken. Laat ze een [Wait for] -blok toevoegen dat is ingesteld op één seconde.
Toevoegen [Wachten op] - Zodra de schijf is opgepakt, moeten ze de schijf 90 graden verplaatsen. Vraag studenten welke blokken ze denken te moeten gebruiken om de schijf 90 graden te verplaatsen.
- Studenten moeten een [Spin for] -blok toevoegen en deze onder het [Wait for] -blok bevestigen.
Voeg [Spin motor for] blok toe - Laat de leerlingen een schijf op de elektromagneet van de robotarm plaatsen en laat het project starten om te zien hoe de robotarm beweegt. Als ze problemen hebben met het oppakken van een schijf en deze 90 graden naar rechts te bewegen, laat ze dan deze stappen opnieuw volgen.
- Opmerking: de robotarm beweegt snel en de schijf kan van de elektromagneet worden geslagen wanneer deze het volgende kwadrant bereikt. Dit kan verrassend zijn voor studenten.
- Zodra studenten met succes een schijf 90 graden naar rechts hebben verplaatst, moeten ze de schijf laten vallen en terugkeren naar hun beginpositie. Daag studenten uit om dezelfde stappen te gebruiken en extra blokken toe te voegen, zodat hun robotarm de schijf laat vallen en terugkeert naar het begin.
Lab 3 Deel 2 Afgerond Project - FaciliteerFaciliteer een gesprek met studenten over hun project terwijl je de kamer omcirkelt. Stel hen enkele van de volgende vragen om een discussie op gang te brengen.
- Hoeveel extra blokken denk je dat je nodig hebt om je robotarm de schijf te laten vallen en terug te keren naar het begin?
- Wat denk je dat er zou gebeuren als we het [Spin for] blok zouden veranderen zodat het 180 graden zou draaien? Waar zou de robotarm stoppen met bewegen?
- Als u aan het einde van het project een tweede schijf wilt verplaatsen, welke andere blokken moet u dan toevoegen?
- Hoe is dit project vergelijkbaar of anders dan het project dat je hebt gemaakt in Play Part 1?
- Herinner groepen eraan om vragen te stellen als ze in de war raken. Niet elke poging zal goed verlopen. Trial and error wordt verwacht.
- Elke keer dat ze het project uitvoeren, moeten studenten identificeren wat er mis is gegaan en brainstormen over ideeën om het op te lossen.
- Als studenten gefrustreerd zijn en meer hulp nodig hebben, herinner ze er dan aan hoe ze de parameter van een blok kunnen wijzigen door de vervolgkeuzelijstopties te selecteren.
- VraagVraag studenten naar enkele van de klusjes die ze thuis moeten doen. Hoe kan het hebben van een elektromagneet hen helpen hun klusjes af te maken? Zou het handig zijn om speelgoed op te halen? Hoe zit het met kleding? Welke taken zijn het meest geschikt voor een elektromagneet?