
เล่น
ส่วนที่ 1 - ทีละขั้นตอน
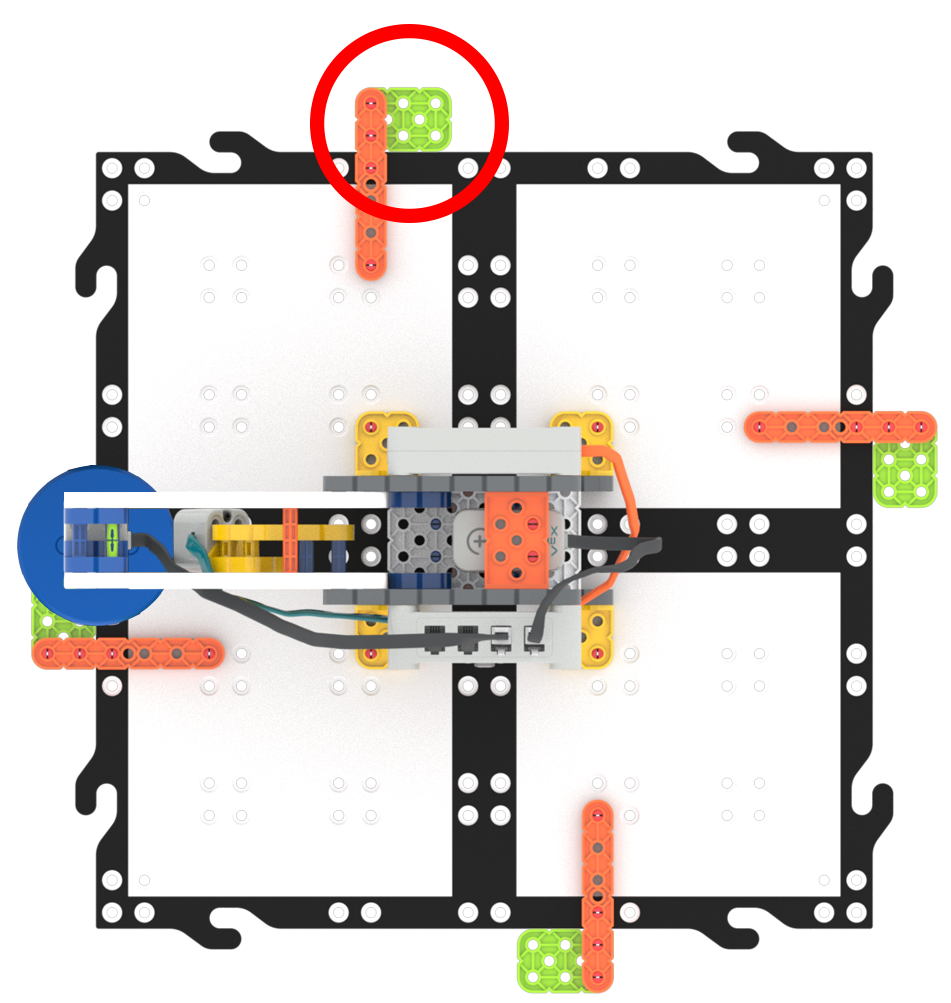
- สั่งให้สั่งให้นักเรียนสร้างโปรเจ็กต์โดยให้แขนหุ่นยนต์เคลื่อนไปที่แผ่นสีเขียวทั้ง 4
แผ่นบนแผ่นกระเบื้อง
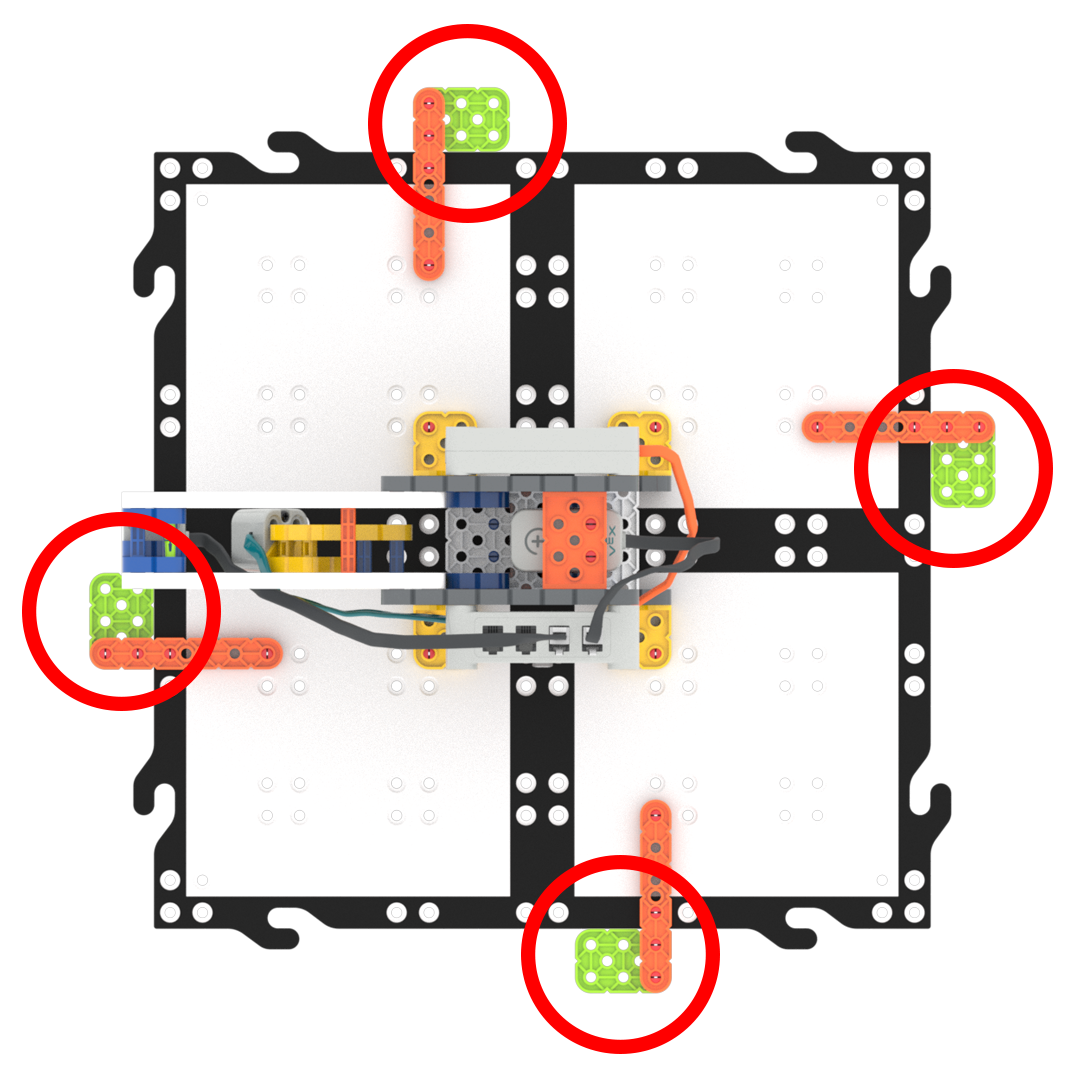
จานสีเขียว 4 ใบ -
แบบจำลองแบบจำลองสำหรับให้นักเรียนทำตามขั้นตอนในการสร้างโปรเจ็กต์ที่สั่งให้แขนหุ่นยนต์เคลื่อนที่ไปยังแผ่นสีเขียวทั้งสี่แผ่นบนแผ่น
GO โดยหมุนมอเตอร์ฐาน
- แบบอย่างสำหรับนักศึกษาขั้นตอนในบทความ เปิดและบันทึก โครงการ สำหรับอุปกรณ์ของคุณ จากนั้นให้พวกเขาทำตามขั้นตอนเหล่านี้เพื่อเปิดและสร้างโครงการของพวกเขา
-
ให้เด็กนักเรียนบันทึกโครงการของตนเป็น ห้องปฏิบัติการ 3 ส่วนที่ 1. หากมีหลายกลุ่มทำงานบนอุปกรณ์เดียวกัน ให้พวกเขาเพิ่มชื่อของตนเองลงในโครงการ

ตั้งชื่อโครงการ - จากนั้นนักเรียนจะต้องเชื่อมต่อแขนหุ่นยนต์ (1 แกน) เข้ากับอุปกรณ์และกำหนดค่าแขนหุ่นยนต์
หมายเหตุ: เมื่อคุณเชื่อมต่อแขนหุ่นยนต์เข้ากับอุปกรณ์เป็นครั้งแรก ไจโรที่ติดตั้งอยู่ใน Brain อาจปรับเทียบ ทำให้แขนหุ่นยนต์เคลื่อนไหวเองชั่วขณะหนึ่ง นี่คือพฤติกรรมที่คาดไว้ อย่าสัมผัสแขนหุ่นยนต์ในขณะที่กำลังปรับเทียบ
-
จำลองขั้นตอนในบทความนี้ กำหนดค่าแขนหุ่นยนต์ เพื่อแนะนำนักเรียนในกระบวนการกำหนดค่าของพวกเขา แขนหุ่นยนต์.

สมองเชื่อมต่อ - แสดงวิธีเพิ่มบล็อก [Spin for] ลงในพื้นที่ทำงานและแนบเข้ากับบล็อกหมวก {When started} ให้เด็กนักเรียนติดตามคุณบนจอฉายหรือผ่านสไลด์โชว์ Lab 3
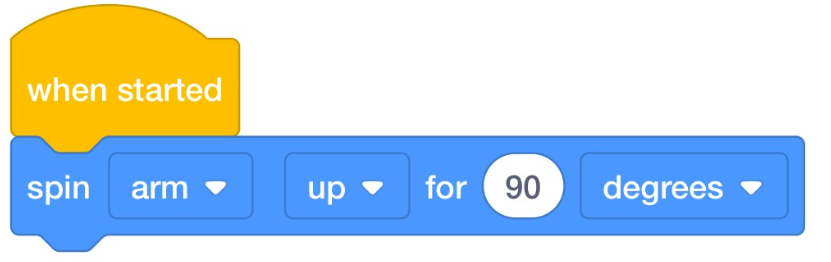
เพิ่ม [หมุนเพื่อ] บล็อค - อธิบายแก่นักเรียนว่าบล็อก [หมุน สำหรับ] มีตัวเลือกมอเตอร์หลายตัว พวกเขาจะแค่ย้ายมอเตอร์ฐาน ดังนั้นนักเรียนควรเลือกชื่อมอเตอร์และเปลี่ยนเป็น "ฐาน"
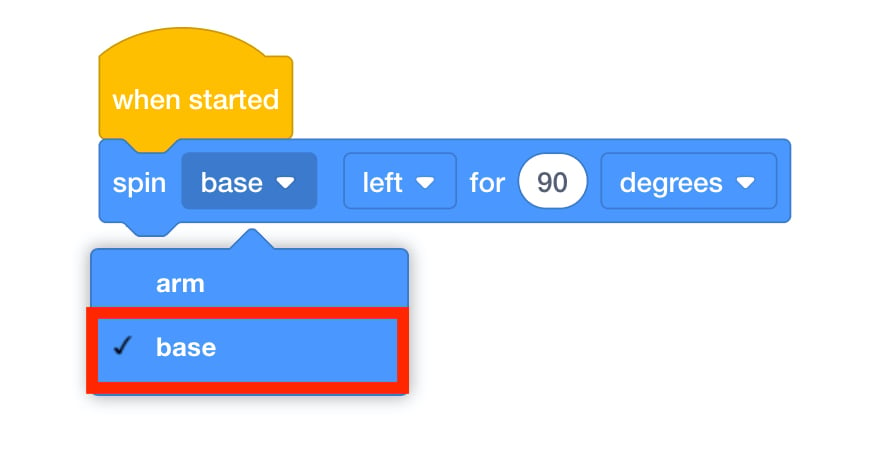
เลือก 'ฐาน' มอเตอร์ - เป้าหมายคือต้องย้าย Base Motor ไปทางขวาให้ได้ เพื่อไปยังจานสีเขียวถัดไป สั่งให้นักเรียนเลือก “ขวา” จากรายการดรอปดาวน์ถัดไป จานสีเขียวถัดไปอยู่ห่างจากตำแหน่งปัจจุบัน 90 องศา ดังนั้นส่วนที่เหลือของบล็อกก็พร้อมที่จะไปแล้ว

เลือก 'ขวา' - เมื่อแขนหุ่นยนต์มาถึงจานสีเขียว นักเรียนควรเขียนโค้ดให้แขนหุ่นยนต์รอไว้ก่อนที่จะย้ายไปยังตำแหน่งถัดไป ให้เด็กนักเรียนเพิ่มบล็อก [รอ] และตั้งค่าให้รอ 2 วินาที
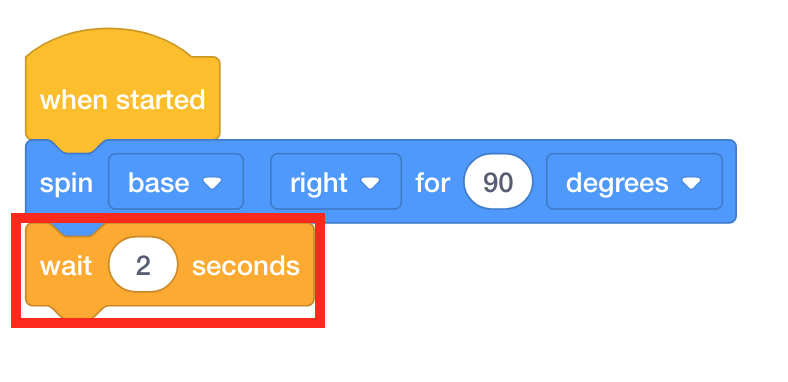
เพิ่ม [รอ] บล็อค - ให้เด็กนักเรียนเริ่มโครงการและดูว่าแขนหุ่นยนต์ เคลื่อนไหวอย่างไร หากพวกเขามีปัญหาใดๆ ย้ายไปที่กรีนเพลทแรก โดยให้พวกเขาทำตามขั้นตอนเหล่านี้อีกครั้ง หากจำเป็น โปรดดูบทความ การเริ่มต้นโครงการใน VEXcode GO และรุ่น ขั้นตอนในการเริ่มต้น โครงการสำหรับนักเรียน.
- เมื่อนักเรียนเคลื่อนย้ายแขนหุ่นยนต์ไปยังแผ่นสีเขียวแผ่นแรกได้สำเร็จแล้ว ให้ท้าทายพวกเขาให้ทำตามขั้นตอนเดียวกันและเพิ่มบล็อกเพิ่มเติมเพื่อให้แขนหุ่นยนต์ของพวกเขาเคลื่อนไปยังแผ่นสีเขียวทั้งสี่แผ่นได้
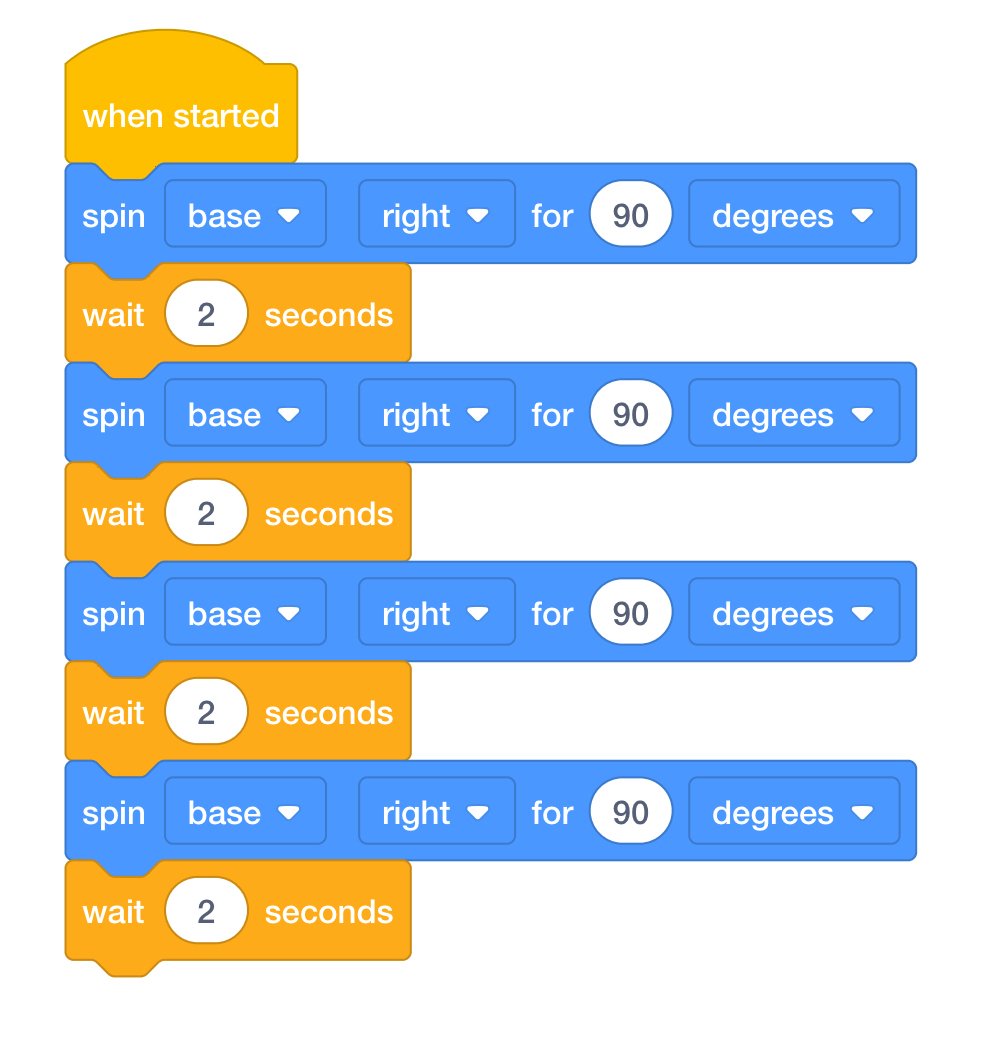
Lab 3 ส่วนที่ 1 โปรเจ็กต์ที่เสร็จสิ้น -
อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนเกี่ยวกับโครงการของพวกเขาในขณะที่คุณเดินรอบห้อง
ถามคำถามต่อไปนี้กับพวกเขาเพื่อกระตุ้นการสนทนา
- คุณคิดว่าต้องใช้บล็อกเพิ่มเติมกี่บล็อกเพื่อให้แขนหุ่นยนต์ของคุณเคลื่อนที่ไปยังแผ่นสีเขียวทั้งสี่แผ่นได้
- คุณคิดว่าจะเกิดอะไรขึ้นถ้าเราเปลี่ยนบล็อก [Spin for] ให้หมุน 180 องศา? แขนหุ่นยนต์จะหยุดเคลื่อนไหวตรงไหน?
- หากคุณต้องการเคลื่อนย้ายดิสก์ขณะที่คุณเคลื่อนย้ายแขนหุ่นยนต์ คุณจะต้องเพิ่มบล็อคอื่นใดอีกหรือไม่
- บล็อกเหล่านี้มีความเกี่ยวข้องกับคำแนะนำทีละขั้นตอนที่คุณทำสำหรับแขนหุ่นยนต์ขับเคลื่อนด้วยมอเตอร์อย่างไร
- เตือนเตือนกลุ่มให้ถามคำถามหากเกิดความสับสน ไม่ใช่ว่าทุกความพยายามจะทำงานได้อย่างถูกต้อง
ทุกครั้งที่เริ่มโครงการ นักเรียนควรระบุสิ่งที่ผิดพลาดและระดมความคิดเพื่อหาแนวทางแก้ไข
คาดว่าจะต้องมีการลองผิดลองถูก หากนักเรียนรู้สึกหงุดหงิดและต้องการความช่วยเหลือเพิ่มเติม ให้แสดงวิธีการจำลองบล็อกโดยคลิกขวาหรือกดบล็อกค้างไว้
- ถามขอให้เด็กนักเรียนคิดย้อนกลับไปถึงรายการที่พวกเขาสร้างขึ้นใน Engage
เกี่ยวกับอุปกรณ์ที่บ้านที่พวกเขาใช้และวิธีการควบคุมอุปกรณ์เหล่านั้น
ในส่วนนี้ นักเรียนได้ใช้บล็อก [Spin for] เพื่อควบคุมมอเตอร์ พวกเขาคิดว่าอุปกรณ์เหล่านี้มีมอเตอร์กี่ชิ้น?
พักเบรกกลางเกม & อภิปรายเป็นกลุ่ม
ทันทีที่กลุ่ม แต่ละกลุ่มได้เคลื่อนย้ายแขนหุ่นยนต์ (แกน 1) ไปยังตำแหน่งทั้ง 4 ตำแหน่งให้มารวมตัวกันเพื่อพูดคุยสั้นๆ
- กลุ่มของคุณประสบปัญหาอะไรมากที่สุดเมื่อสร้างโครงการ? ส่วนที่ง่ายที่สุดในการสร้างโครงการคืออะไร?
- ต่อไปเราจะมาทำการย้ายดิสก์ แต่แม่เหล็กอันนี้ดูแตกต่างออกไป คุณสังเกตเห็นอะไรเกี่ยวกับแม่เหล็กไฟฟ้าเมื่อเทียบกับแม่เหล็กเดิม?
- เนื่องจากเราสามารถควบคุม Electromagnet ได้โดยใช้ VEXcode GO เรามาใช้ Electromagnet และบล็อคจาก Play Part 1 เพื่อสร้างโปรเจ็กต์ใหม่ในการย้ายดิสก์จากตำแหน่งหนึ่งไปยังอีกตำแหน่งหนึ่ง
ตอนที่ 2 - ทีละขั้นตอน
-
สั่งให้สั่งให้นักเรียนแก้ไขโครงการของตนเพื่อสร้างโครงการที่แม่เหล็กไฟฟ้าจะหยิบแผ่นดิสก์และวางแผ่นดิสก์ในตำแหน่งอื่น
ย้ายดิสก์ไปยังตำแหน่งใหม่ - โมเดลโมเดลเปิดใช้งาน VEXcode GO
และสร้างโปรเจ็กต์โดยที่แขนหุ่นยนต์หยิบดิสก์ขึ้นมาและย้ายไปทางขวา จากนั้นกลับสู่ตำแหน่งเริ่มต้น
- ให้ผู้เรียนเปิดโครงการ Lab 3 ส่วนที่ 1 ของตน ซึ่งพวกเขาจะใช้ส่วนนี้เป็นฐานสำหรับโครงการในส่วนนี้
-
นักเรียนจะต้องบันทึกโครงการของตนไว้ในตอนเริ่มต้นของห้องปฏิบัติการ ให้พวกเขาเลือก “บันทึกเป็น” หรือ "บันทึกลงในอุปกรณ์ของคุณ" (ขึ้นอยู่กับเวอร์ชัน VEXcode GO ที่ใช้) จากเมนู FIle และ บันทึกของพวกเขา โครงการ เช่น ห้องปฏิบัติการ 3 ส่วนที่ 2. หากมีหลายกลุ่มทำงานบนอุปกรณ์เดียวกัน ให้พวกเขาเพิ่มชื่อของตนเองลงในโครงการ

ตั้งชื่อโครงการ
-
หากยังไม่ได้เชื่อมต่อ นักเรียนจะต้องเชื่อมต่อแขนหุ่นยนต์ (1 แกน) เข้ากับอุปกรณ์ของตน หากจำเป็น แบบอย่างสำหรับนักเรียนขั้นตอนในบทความนี้ เชื่อมต่อสมอง VEX GO เพื่อช่วยให้พวกเขาเชื่อมต่อสมองกับอุปกรณ์ของพวกเขา

สมองเชื่อมต่อ - แสดงให้นักเรียนเห็นวิธีการแยกบล็อกออกจากบล็อก {When started} และย้ายสแต็กไปด้านข้าง
ให้เด็กนักเรียนติดตามคุณบนจอฉายหรือผ่านสไลด์โชว์ Lab 3
- หมายเหตุ: แจ้งให้ผู้เรียนทราบว่าสแต็กนี้จะไม่ทำงานเนื่องจาก ไม่ได้แนบเข้ากับบล็อก {When started}
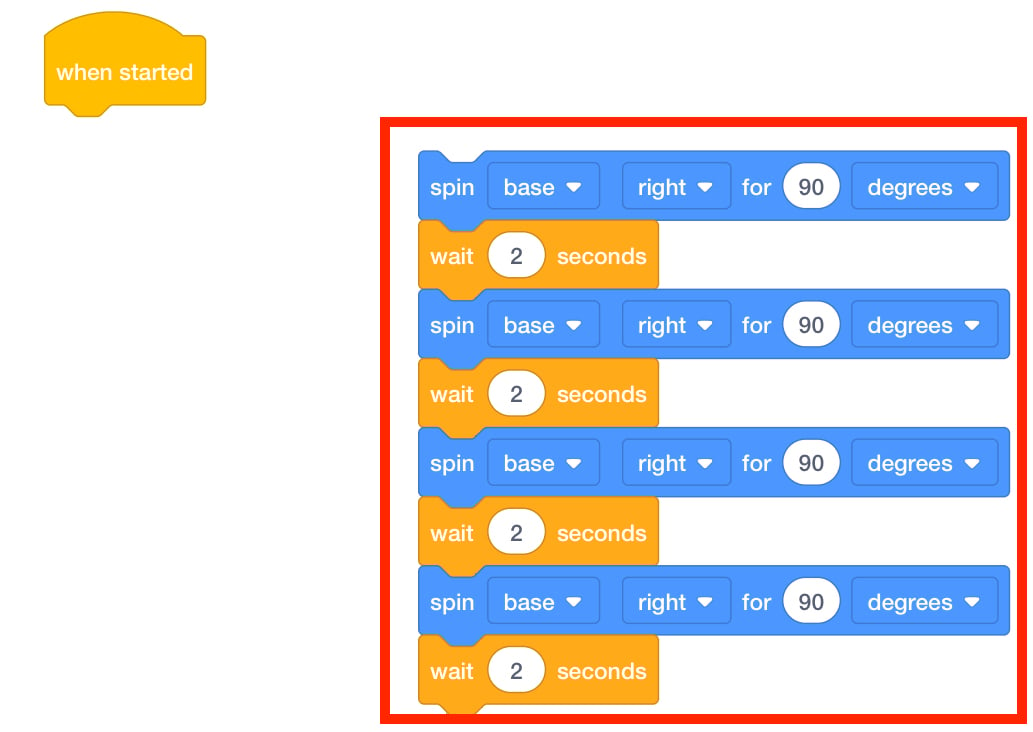
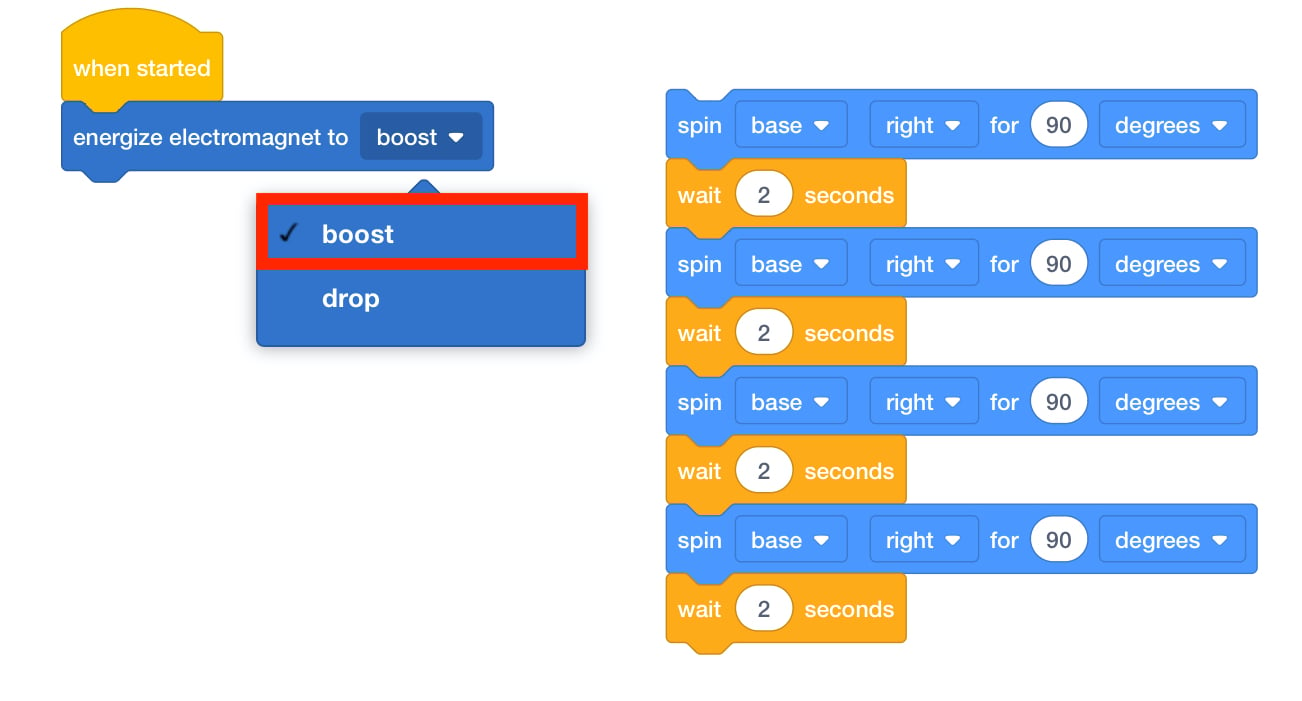
บล็อกที่ไม่แนบจะไม่ทำงาน - แนะนำบล็อก [สร้างพลังแม่เหล็กไฟฟ้า] ให้กับนักเรียน อธิบายว่าบล็อคนี้จะควบคุมว่าแม่เหล็กไฟฟ้าจะถูกตั้งค่าเป็น “เพิ่ม” หรือ “ลดลง”
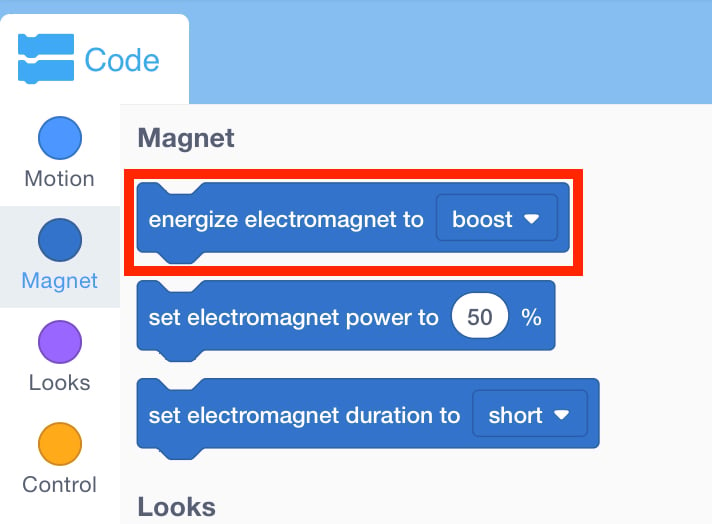
[กระตุ้นแม่เหล็กไฟฟ้า] บล็อก - ลากบล็อก [Energize Electromagnet] เข้าไปในพื้นที่ทำงานและแนบเข้ากับบล็อกหมวก {When started}
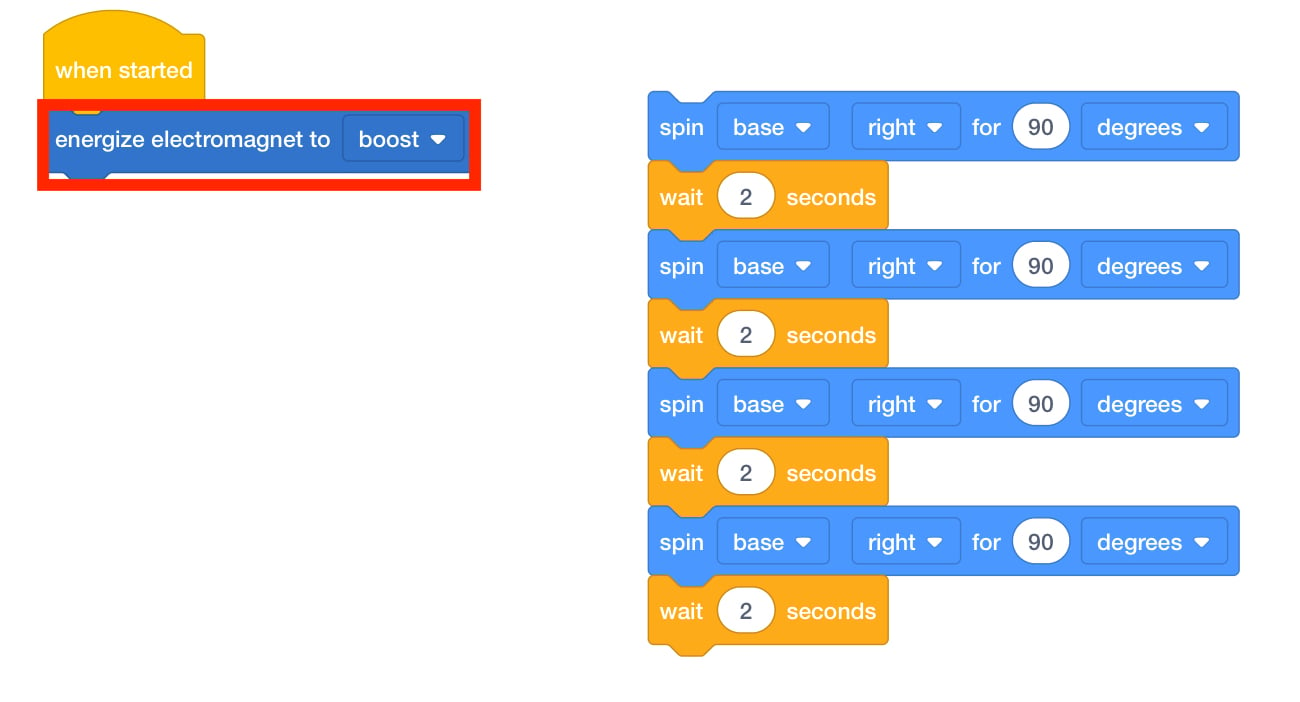
[กระตุ้นแม่เหล็กไฟฟ้า] บล็อค - อธิบายแก่นักเรียนว่าการตั้งค่าแม่เหล็กไฟฟ้าเป็น "เพิ่ม" จะดึงดูดแผ่นดิสก์เพื่อให้ถูกหยิบขึ้นมา ตรวจสอบให้แน่ใจว่ามีการตั้งค่าบล็อกเป็น "บูสต์" ให้กับนักเรียน เพื่อให้สามารถหยิบดิสก์ขึ้นมาได้
ตั้งค่าให้บูสต์ - เมื่อตั้งค่าแม่เหล็กไฟฟ้าเป็น "เพิ่มความเร็ว" แล้ว นักเรียนจะต้องแน่ใจว่ามีเวลาพอที่จะหยิบดิสก์ได้ ให้พวกเขาเพิ่มชุดบล็อก [รอ] เป็นเวลาหนึ่งวินาที
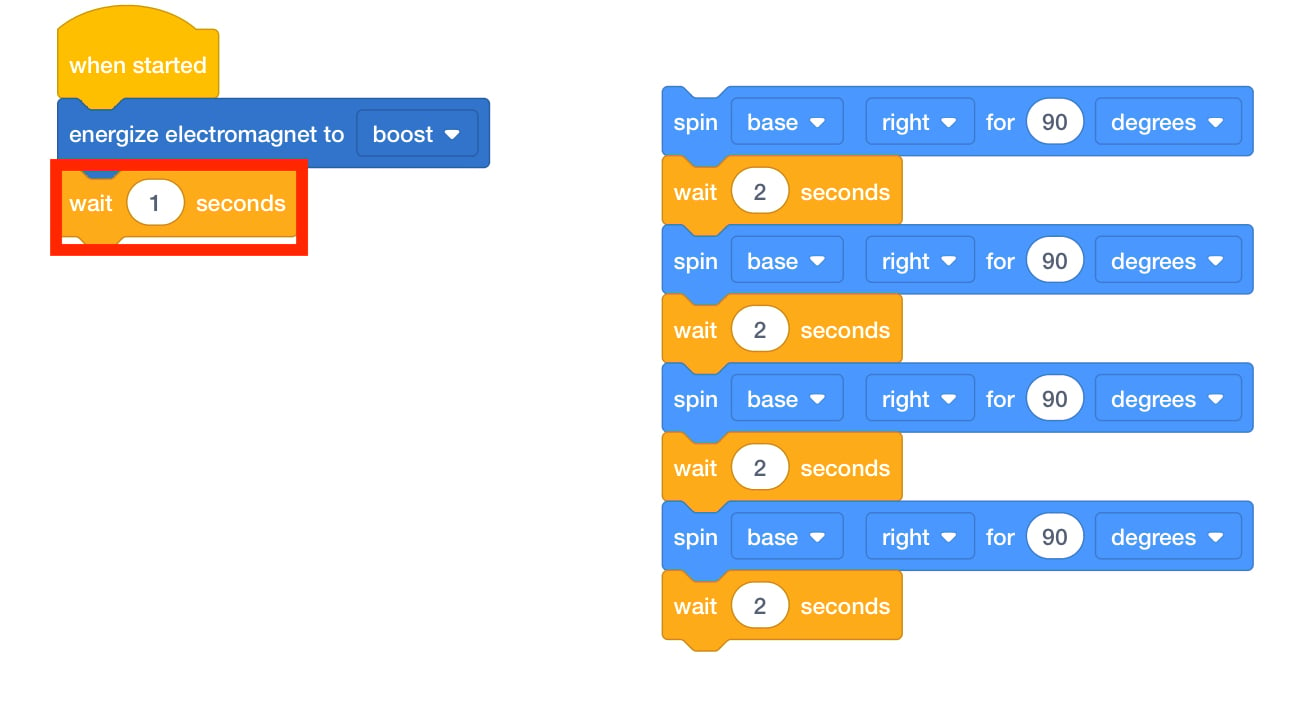
เพิ่ม [รอ] - เมื่อหยิบดิสก์ขึ้นมาแล้ว ต้องขยับดิสก์ 90 องศา ถามนักเรียนว่าพวกเขาคิดว่าควรใช้บล็อกใดเพื่อย้ายแผ่นดิสก์ 90 องศา
- นักเรียนควรเพิ่มบล็อก [หมุนสำหรับ] และแนบไว้ใต้บล็อก [รอ]
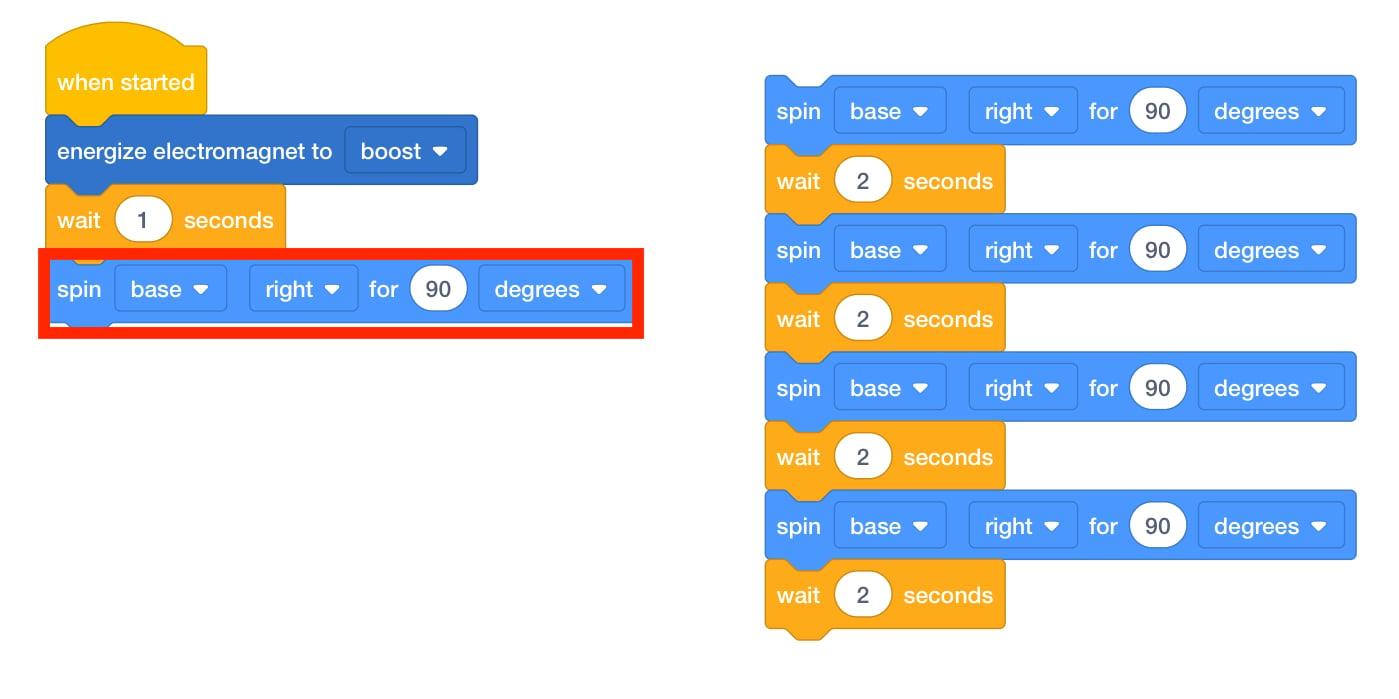
เพิ่ม [มอเตอร์หมุนสำหรับ] บล็อค - ให้เด็กนักเรียนวางแผ่นดิสก์ไว้บนแม่เหล็กไฟฟ้าของแขนหุ่นยนต์
และเริ่ม และดูว่าแขนหุ่นยนต์ เคลื่อนที่อย่างไร
หากพวกเขาประสบปัญหาในการหยิบดิสก์และเลื่อนไปทางขวา 90 องศา ให้ทำตามขั้นตอนเหล่านี้อีกครั้ง
- หมายเหตุ: แขนหุ่นยนต์เคลื่อนที่อย่างรวดเร็วและดิสก์อาจจะหลุดออกจากแม่เหล็กไฟฟ้าเมื่อถึงจตุภาคถัดไป นี่อาจเป็นเรื่องน่าแปลกใจสำหรับนักเรียน
- เมื่อนักเรียนเลื่อนแผ่นดิสก์ไปทางขวา 90 องศาสำเร็จแล้ว พวกเขาจะต้องวางแผ่นดิสก์ลงและกลับสู่ตำแหน่งเริ่มต้น ท้าทายนักเรียนให้ใช้ขั้นตอนเดียวกันและเพิ่มบล็อกเพิ่มเติมเพื่อให้แขนหุ่นยนต์ของพวกเขาปล่อยแผ่นดิสก์และกลับสู่จุดเริ่มต้น
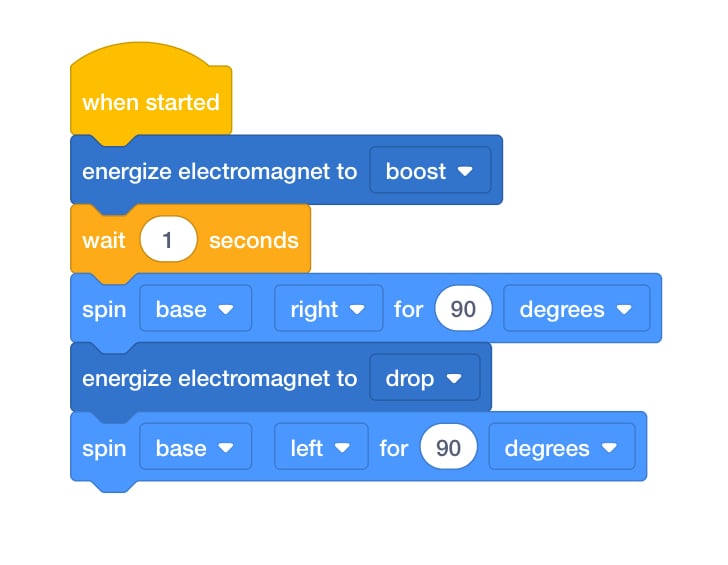
Lab 3 ส่วนที่ 2 เสร็จสิ้นโครงการ -
อำนวยความสะดวกอำนวยความสะดวกในการสนทนากับนักเรียนเกี่ยวกับโครงการของพวกเขาในขณะที่คุณเดินรอบห้อง
ถามคำถามต่อไปนี้กับพวกเขาเพื่อกระตุ้นการสนทนา
- คุณคิดว่าต้องใช้บล็อกเพิ่มเติมกี่บล็อกเพื่อให้แขนหุ่นยนต์ของคุณทิ้งดิสก์และกลับสู่จุดเริ่มต้น
- คุณคิดว่าจะเกิดอะไรขึ้นถ้าเราเปลี่ยนบล็อก [Spin for] เพื่อหมุน 180 องศา? แขนหุ่นยนต์จะหยุดเคลื่อนไหวตรงไหน?
- หากคุณต้องการย้ายดิสก์ที่สองเมื่อสิ้นสุดโครงการ คุณจะต้องเพิ่มบล็อคอื่นใดอีกหรือไม่
- โปรเจ็กต์นี้เหมือนหรือแตกต่างจากโปรเจ็กต์ที่คุณสร้างใน Play Part 1 อย่างไร
- เตือนเตือนกลุ่มให้ถามคำถามหากเกิดความสับสน ไม่ใช่ว่าทุกความพยายามจะทำงานได้อย่างถูกต้อง
คาดว่าจะต้องมีการลองผิดลองถูก
- ทุกครั้งที่ดำเนินโครงการ นักเรียนควรระบุสิ่งที่ผิดพลาดและระดมความคิดเพื่อหาแนวทางแก้ไข
- หากนักเรียนรู้สึกหงุดหงิดและต้องการความช่วยเหลือเพิ่มเติม ให้เตือนพวกเขาถึงวิธีการเปลี่ยนพารามิเตอร์ของบล็อกโดยเลือกตัวเลือกแบบดรอปดาวน์
- ถามถามนักเรียนเกี่ยวกับงานบ้านบางอย่างที่พวกเขาต้องทำที่บ้าน การมีแม่เหล็กไฟฟ้าอาจช่วยให้พวกเขาทำภารกิจต่างๆ ให้เสร็จสิ้นได้อย่างไร? จะมีประโยชน์ในการเก็บของเล่นมั้ย? แล้วเสื้อผ้าละคะ? งานประเภทใดที่เหมาะกับแม่เหล็กไฟฟ้าที่สุด?