
الدرس 2: القيادة إلى الحرف "أ"
القيادة إلى الحرف "أ"
الآن بعد أن قمت بإنشاء واختبار مشروع يتوقف فيه روبوت الواقع الافتراضي بمجرد أن يكتشف مستشعر المسافة جدارًا، ستقوم ببناء مشروع يتنقل روبوت الواقع الافتراضي إلى الحرف "A" على ملعب المتاهة الجدارية.

- للقيادة إلى الحرف "A"، سيحتاج روبوت الواقع الافتراضي إلى اكتشاف جدارين، والانعطاف يسارًا عند اكتشاف
هذه الجدران. بعد ذلك، سيتوقف روبوت الواقع الافتراضي عندما يكتشف الجدار الثالث، الموجود خلف الحرف
"A".
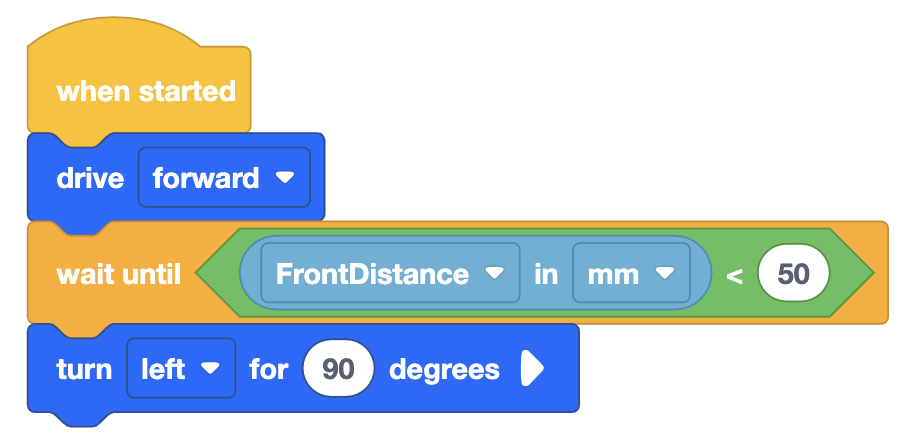
- ابدأ بتعديل المشروع السابق أو إنشاء مشروع جديد لمطابقة هذا المشروع الأساسي. لاحظ أن كتلة [Turn for]
مطلوبة لأنه بمجرد أن يكون مستشعر المسافة على بعد 50 ملم (ملم) من الجدار، سيتجه روبوت الواقع الافتراضي
يسارًا للمتابعة نحو الحرف "A". تذكر أنه يمكنك استخدام كتل VEXcode أو كتل Switch أو مزيج من كلا النوعين
من الكتل.
-
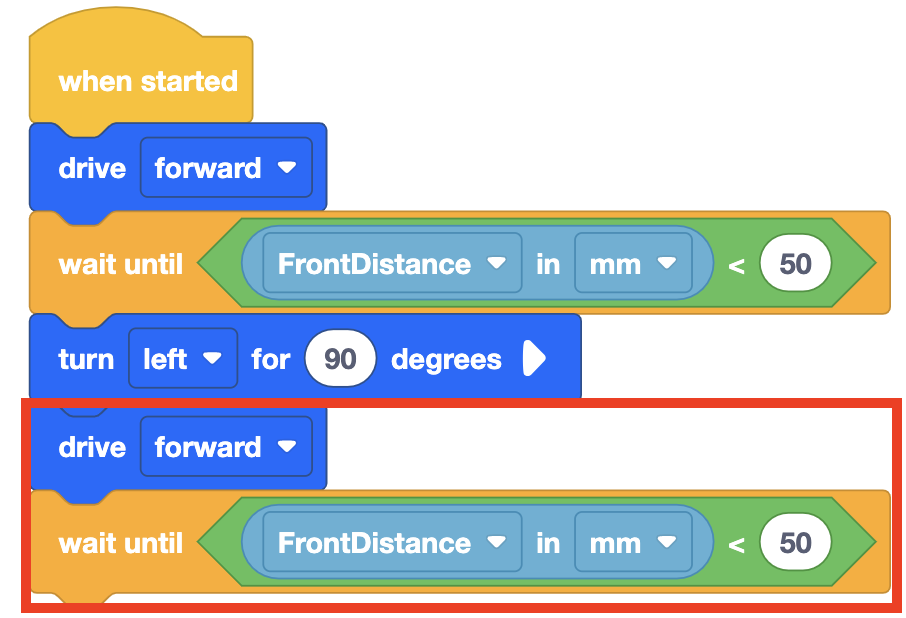
أضف كتلة [Drive] أخرى، و [Wait until] مع ضبط <Less than> الكتلة على 50 ملليمتر (مم)، و (Distance from) داخل <Less than> الكتلة.
لمعلوماتك
استخدم الأداة المكررة لأقسام التعليمات البرمجية التي تتكرر في المشروع. يتيح لك ذلك توفير الوقت. لمزيد من المعلومات حول كيفية تكرار الكتل، راجع المقالقائمة السياق - كتل الواقع الافتراضي.
- أخيرًا، أضف الكتل التالية لإرشاد روبوت الواقع الافتراضي للكشف عن الجدار النهائي خلف الحرف "A" ثم
التوقف عن القيادة.

- قم بتشغيل ملعب المتاهة الجدارية إذا لم يكن مفتوحًا بالفعل وقم بتشغيل المشروع.
- شاهد محرك روبوت الواقع الافتراضي من بداية المتاهة الجدارية إلى الحرف "A"، ثم توقف.

- لاحظ أن روبوت الواقع الافتراضي لا يصطدم بأي جدران أثناء قيادته إلى الحرف "أ". عندما تشير قيمة مستشعر المسافة إلى أن روبوت الواقع الافتراضي أقل من 50 ملم (مم) من الحائط، يُطلب من روبوت الواقع الافتراضي الدوران أو التوقف في المشروع.
قم بتحديد زر التالي للمتابعة مع بقية هذا الدرس.