
পাঠ ২: 'A' অক্ষরের দিকে গাড়ি চালান
'A' অক্ষরে গাড়ি চালান
এখন আপনি এমন একটি প্রকল্প তৈরি এবং পরীক্ষা করেছেন যেখানে দূরত্ব সেন্সর একটি প্রাচীর সনাক্ত করার পরে VR রোবট বন্ধ হয়ে যায়, আপনি এমন একটি প্রকল্প তৈরি করবেন যা VR রোবটকে Wall Maze Playgroundএ 'A' অক্ষরে নেভিগেট করবে।

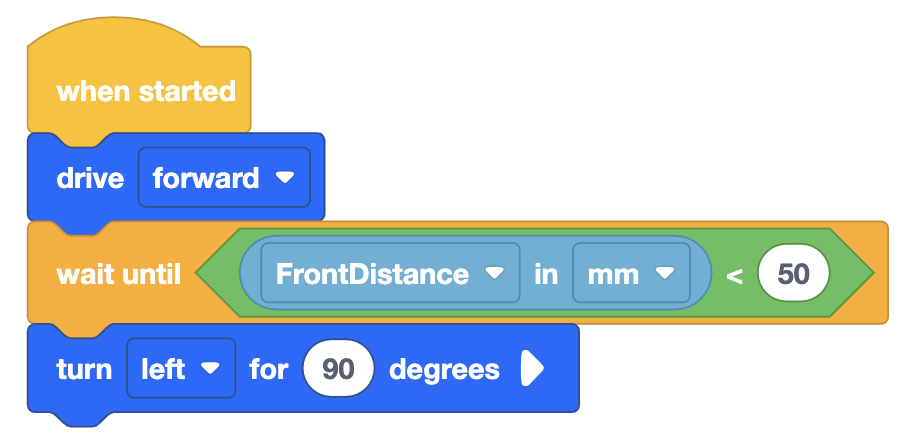
- 'A' অক্ষরে ড্রাইভ করতে, VR রোবটটিকে দুটি দেয়াল সনাক্ত করতে হবে এবং এই দেয়ালগুলি সনাক্ত করা হলে বাম দিকে ঘুরতে হবে। তারপর, VR রোবট থামবে যখন এটি 'A' অক্ষরের পিছনে অবস্থিত তৃতীয় প্রাচীর সনাক্ত করবে।
- পূর্ববর্তী প্রকল্পটি সংশোধন করে শুরু করুন বা এই ভিত্তি প্রকল্পের সাথে মেলে একটি নতুন প্রকল্প তৈরি করুন৷ মনে রাখবেন যে [টার্ন ফর] ব্লক প্রয়োজন কারণ একবার দূরত্ব সেন্সরটি একটি দেয়ালের 50 মিলিমিটার (মিমি) মধ্যে হলে, VR রোবটটি 'A' অক্ষরের দিকে এগিয়ে যেতে বাম দিকে ঘুরবে। মনে রাখবেন যে আপনি VEXcode ব্লক, সুইচ ব্লক, অথবা উভয় ধরণের ব্লকের সংমিশ্রণ ব্যবহার করতে পারেন।
-
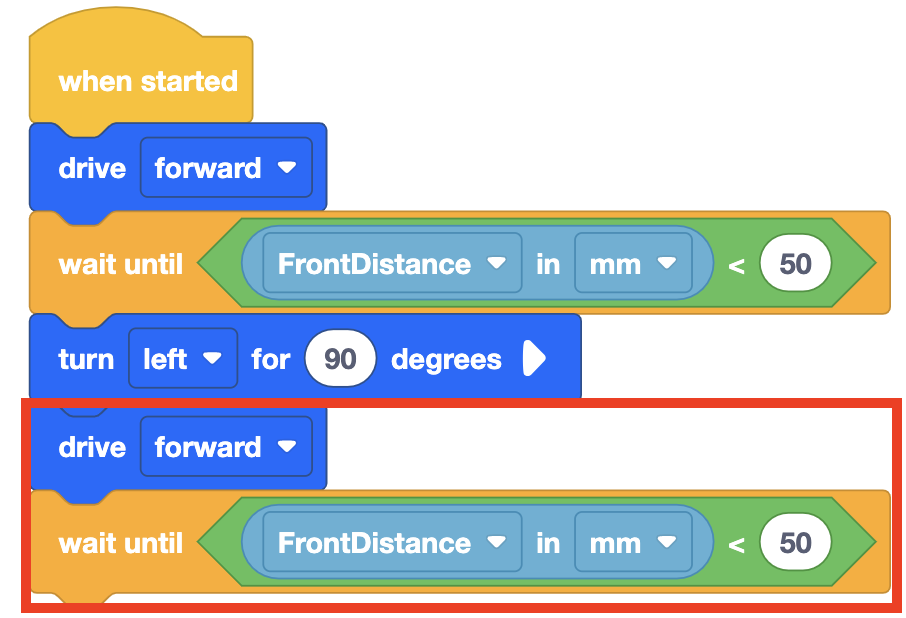
আরেকটি [ড্রাইভ] যোগ করুন, এবং [অপেক্ষা করুন] ব্লক <Less than> ব্লকটি 50 মিলিমিটার (মিমি) এ সেট করুন, এবং <Less than> ব্লকের ভিতরে (দূরত্ব)।
আপনার তথ্যের জন্য
কোডের অংশগুলির জন্য ডুপ্লিকেট টুল ব্যবহার করুন যা একটি প্রকল্পে পুনরাবৃত্তি করে। এটি আপনাকে সময় বাঁচাতে দেয়। ব্লকগুলি কীভাবে ডুপ্লিকেট করবেন সে সম্পর্কে আরও তথ্যের জন্য,প্রসঙ্গ মেনু - VR ব্লক নিবন্ধটি দেখুন।
- অবশেষে, VR রোবটকে 'A' অক্ষরের পিছনে চূড়ান্ত প্রাচীর সনাক্ত করতে নির্দেশ দিতে নিম্নলিখিত ব্লকগুলি যোগ করুন তারপর গাড়ি চালানো বন্ধ করুন।

- ওয়াল মেজ প্লেগ্রাউন্ড চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
- ওয়াল ধাঁধাঁর শুরু থেকে 'A' অক্ষর পর্যন্ত VR রোবট ড্রাইভ দেখুন এবং তারপর থামুন।

- লক্ষ্য করুন যে VR রোবটটি 'A' অক্ষরে যাওয়ার কারণে কোনো দেয়ালে ধাক্কা খায় না। যখন দূরত্ব সেন্সর মান রিপোর্ট করে যে VR রোবটটি প্রাচীর থেকে 50 মিলিমিটার (মিমি) কম, তখন VR রোবটটিকে প্রকল্পে ঘুরতে বা থামতে নির্দেশ দেওয়া হয়।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।