
പാഠം 2: 'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക
'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുക
ഡിസ്റ്റൻസ് സെൻസർ ഒരു മതിൽ കണ്ടെത്തിക്കഴിഞ്ഞാൽ VR റോബോട്ട് നിർത്തുന്ന ഒരു പ്രോജക്റ്റ് നിങ്ങൾ ഇപ്പോൾ സൃഷ്ടിച്ച് പരീക്ഷിച്ചു കഴിഞ്ഞു, വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ലെ 'A' എന്ന അക്ഷരത്തിലേക്ക് VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യുന്ന ഒരു പ്രോജക്റ്റ് നിങ്ങൾ നിർമ്മിക്കും.

- 'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യാൻ, VR റോബോട്ട് രണ്ട് ചുവരുകൾ കണ്ടെത്തേണ്ടതുണ്ട്, ഈ ചുവരുകൾ കണ്ടെത്തുമ്പോൾ ഇടത്തേക്ക് തിരിയേണ്ടതുണ്ട്. പിന്നെ, 'A' എന്ന അക്ഷരത്തിന് പിന്നിലുള്ള മൂന്നാമത്തെ മതിൽ കണ്ടെത്തുമ്പോൾ VR റോബോട്ട് നിർത്തും.
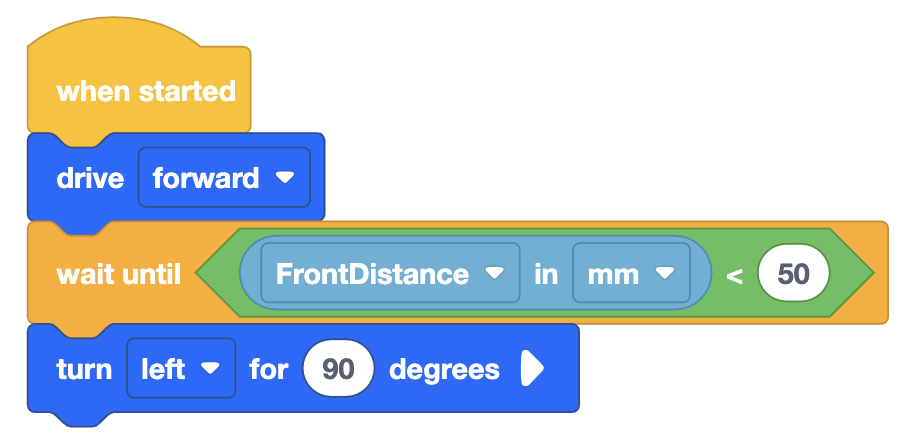
- മുമ്പത്തെ പ്രോജക്റ്റ് പരിഷ്കരിച്ചുകൊണ്ട് ആരംഭിക്കുക അല്ലെങ്കിൽ ഈ അടിസ്ഥാന പ്രോജക്റ്റുമായി പൊരുത്തപ്പെടുന്നതിന് ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കുക. [ടേൺ ഫോർ] ബ്ലോക്ക് ആവശ്യമാണെന്ന് ശ്രദ്ധിക്കുക, കാരണം ദൂര സെൻസർ ഒരു ഭിത്തിയിൽ നിന്ന് 50 മില്ലിമീറ്ററിനുള്ളിൽ (മില്ലീമീറ്റർ) എത്തിക്കഴിഞ്ഞാൽ, VR റോബോട്ട് ഇടത്തേക്ക് തിരിഞ്ഞ് 'A' എന്ന അക്ഷരത്തിലേക്ക് പോകും. നിങ്ങൾക്ക് VEXcode ബ്ലോക്കുകൾ, സ്വിച്ച് ബ്ലോക്കുകൾ, അല്ലെങ്കിൽ രണ്ട് ബ്ലോക്ക് തരങ്ങളുടെയും സംയോജനം എന്നിവ ഉപയോഗിക്കാമെന്ന് ഓർമ്മിക്കുക.
-
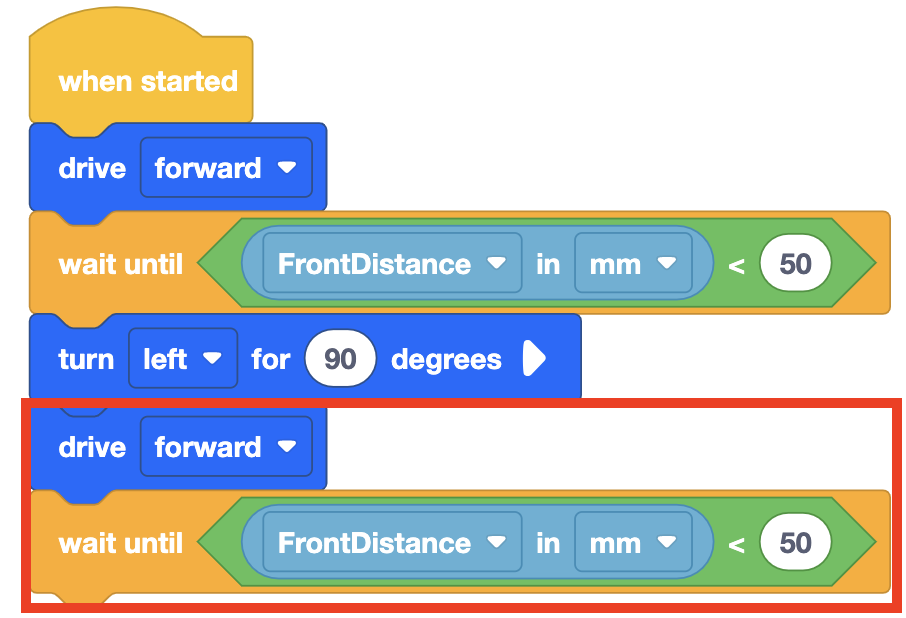
മറ്റൊരു [ഡ്രൈവ്], [വരെ കാത്തിരിക്കുക] ബ്ലോക്ക് എന്നിവ ചേർത്ത് <Less than> ബ്ലോക്ക് 50 മില്ലിമീറ്ററായി (മില്ലീമീറ്റർ) സജ്ജമാക്കുക, <Less than> ബ്ലോക്കിനുള്ളിലെ (ദൂരം) ചേർക്കുക.
നിങ്ങളുടെ അറിവിലേക്കായി
ഒരു പ്രോജക്റ്റിൽ ആവർത്തിക്കുന്ന കോഡിന്റെ ഭാഗങ്ങൾക്കായി ഡ്യൂപ്ലിക്കേറ്റ് ഉപകരണം ഉപയോഗിക്കുക. ഇത് സമയം ലാഭിക്കാൻ നിങ്ങളെ അനുവദിക്കുന്നു. ബ്ലോക്കുകൾ എങ്ങനെ ഡ്യൂപ്ലിക്കേറ്റ് ചെയ്യാം എന്നതിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്,കോൺടെക്സ്റ്റ് മെനു - VR ബ്ലോക്കുകൾ എന്ന ലേഖനം കാണുക.
- അവസാനമായി, 'A' എന്ന അക്ഷരത്തിന് പിന്നിലെ അവസാന മതിൽ കണ്ടെത്താനും തുടർന്ന് ഡ്രൈവിംഗ് നിർത്താനും VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുന്നതിന് ഇനിപ്പറയുന്ന ബ്ലോക്കുകൾ ചേർക്കുക.

- വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട് തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
- വാൾ മെയ്സിന്റെ തുടക്കം മുതൽ 'A' എന്ന അക്ഷരം വരെ VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക, തുടർന്ന് നിർത്തുക.

- ശ്രദ്ധിക്കുക, VR റോബോട്ട് 'A' എന്ന അക്ഷരത്തിലേക്ക് നീങ്ങുമ്പോൾ ഒരു ചുവരിലും ഇടിക്കുന്നില്ല. ഡിസ്റ്റൻസ് സെൻസർ മൂല്യം VR റോബോട്ട് ഭിത്തിയിൽ നിന്ന് 50 മില്ലിമീറ്ററിൽ (മില്ലീമീറ്റർ) താഴെയാണെന്ന് റിപ്പോർട്ട് ചെയ്യുമ്പോൾ, പ്രോജക്റ്റിൽ തിരിയാനോ നിർത്താനോ VR റോബോട്ടിനോട് നിർദ്ദേശിക്കുന്നു.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.