
Pelajaran 2: Berkendara ke Huruf 'A'
Berkendara ke Huruf 'A'
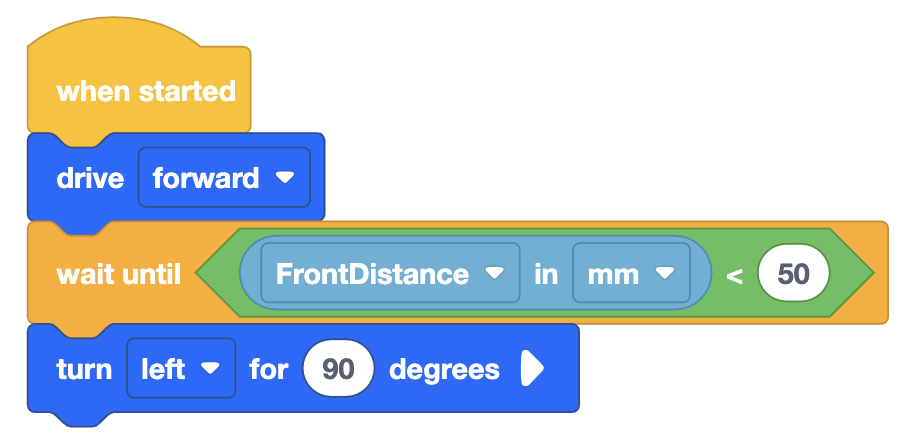
Sekarang setelah Anda membuat dan menguji proyek yang membuat Robot VR berhenti setelah Sensor Jarak mendeteksi dinding, Anda akan membangun proyek yang menavigasi Robot VR ke huruf 'A' di Wall Maze Playground.

- Untuk mencapai huruf 'A', Robot VR perlu mendeteksi dua dinding, dan berbelok ke kiri saat dinding ini terdeteksi. Kemudian, Robot VR akan berhenti ketika mendeteksi dinding ketiga, yang terletak di belakang huruf 'A.'
- Mulailah dengan memodifikasi proyek sebelumnya atau buat proyek baru yang sesuai dengan proyek dasar ini. Perhatikan bahwa blok [Putar ke] diperlukan karena begitu Sensor Jarak berada dalam jarak 50 milimeter (mm) dari dinding, Robot VR akan berbelok ke kiri untuk terus menuju huruf 'A.' Ingatlah bahwa Anda dapat menggunakan blok VEXcode, blok Switch, atau kombinasi kedua jenis blok tersebut.
-
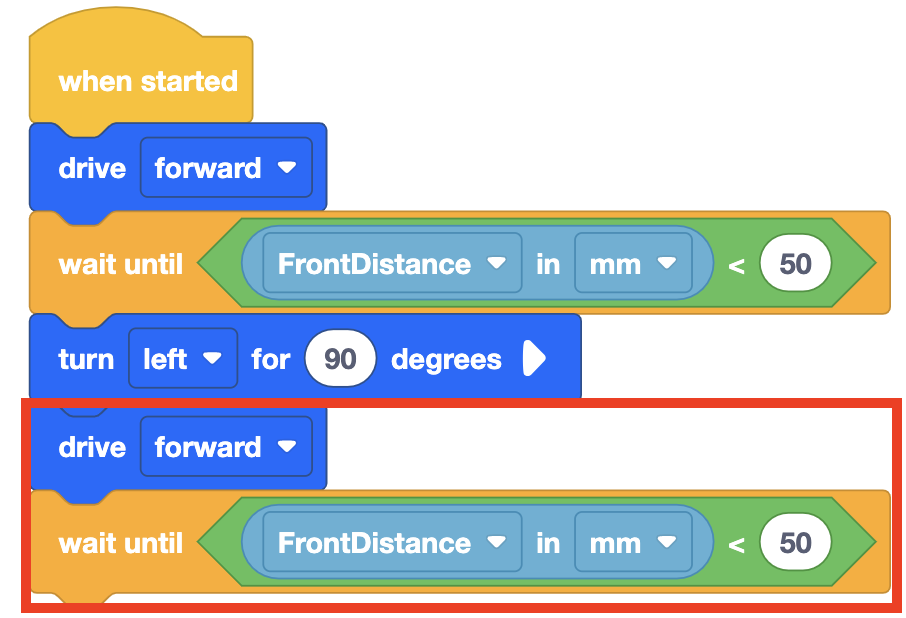
Tambahkan blok [Drive] lain, dan [Wait until] dengan blok <Less than> diatur ke 50 milimeter (mm), dan (Distance from) di dalam blok <Less than>.
Untuk Informasi Anda
Gunakan alat Duplikat untuk bagian kode yang berulang dalam suatu proyek. Ini memungkinkan Anda menghemat waktu. Untuk informasi lebih lanjut tentang cara menduplikasi blok, lihat artikelMenu Konteks - Blok VR.
- Terakhir, tambahkan blok berikut untuk menginstruksikan Robot VR untuk mendeteksi dinding terakhir di belakang huruf 'A' lalu berhenti melaju.

- Luncurkan Wall Maze Playground jika belum terbuka dan jalankan proyeknya.
- Saksikan Robot VR melaju dari awal Wall Maze hingga huruf 'A,' lalu berhenti.

- Perhatikan bahwa Robot VR tidak menabrak dinding mana pun saat melaju ke huruf 'A'. Ketika nilai Sensor Jarak melaporkan bahwa Robot VR berada kurang dari 50 milimeter (mm) dari dinding, Robot VR diinstruksikan untuk berputar atau berhenti dalam proyek.
Pilih tombol Berikutnya untuk melanjutkan sisa Pelajaran ini.