
Bài 2: Lái xe đến chữ 'A'
Lái xe đến chữ 'A'
Bây giờ bạn đã tạo và thử nghiệm một dự án trong đó VR Robot dừng lại khi Cảm biến khoảng cách phát hiện ra một bức tường, bạn sẽ xây dựng một dự án điều hướng VR Robot đến chữ 'A' trên Sân chơi mê cung tường .

- Để lái đến chữ 'A', Robot VR sẽ cần phát hiện hai bức tường và rẽ trái khi phát hiện ra những bức tường này. Sau đó, VR Robot sẽ dừng lại khi phát hiện bức tường thứ ba, nằm phía sau chữ 'A'.
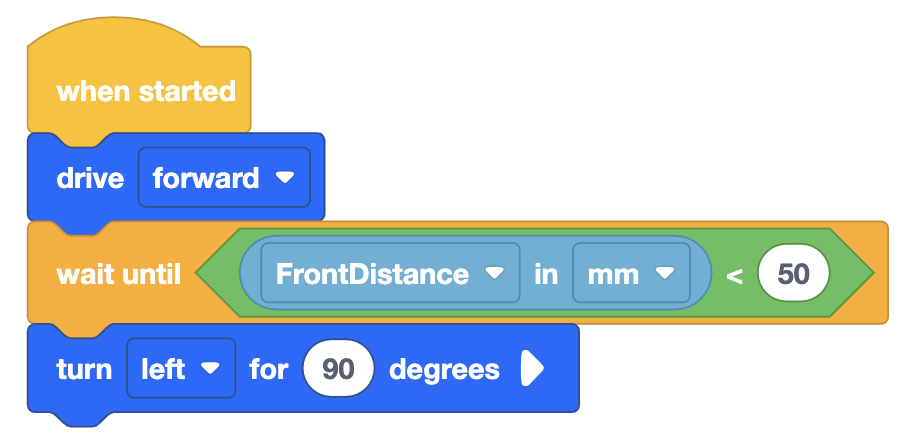
- Bắt đầu bằng cách sửa đổi dự án trước đó hoặc tạo một dự án mới phù hợp với dự án cơ sở này. Lưu ý rằng khối [Quay tới] là cần thiết vì khi Cảm biến khoảng cách nằm trong phạm vi 50 milimét (mm) của bức tường, Robot VR sẽ rẽ trái để tiếp tục tiến về phía chữ 'A'. Hãy nhớ rằng bạn có thể sử dụng khối VEXcode, khối Switch hoặc kết hợp cả hai loại khối.
-
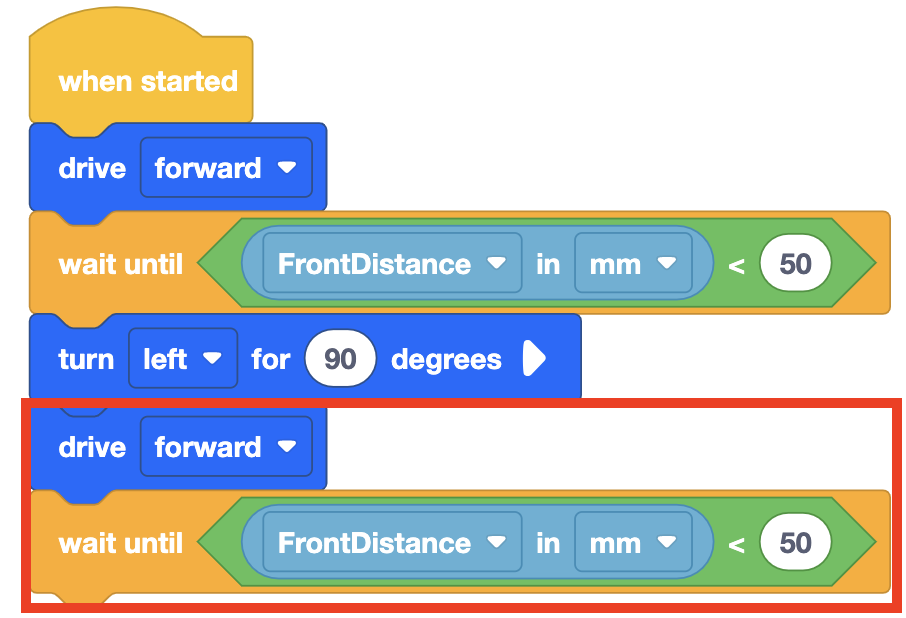
Thêm một khối [Drive] và [Wait until] khác với khối <Less than> được đặt thành 50 milimét (mm) và (Khoảng cách từ) bên trong khối <Less than>.
Để bạn biết
Sử dụng công cụ Sao chép cho các đoạn mã lặp lại trong một dự án. Điều này giúp bạn tiết kiệm thời gian. Để biết thêm thông tin về cách sao chép các khối, hãy xem bài viếtMenu ngữ cảnh - Khối VR.
- Cuối cùng, thêm các khối sau để hướng dẫn Robot VR phát hiện bức tường cuối cùng phía sau chữ 'A' rồi dừng lái.

- Khởi chạy Sân chơi mê cung tường nếu nó chưa mở và chạy dự án.
- Hãy xem Robot VR di chuyển từ đầu Mê cung tường đến chữ 'A' rồi dừng lại.

- Lưu ý rằng Robot VR không va vào bất kỳ bức tường nào khi di chuyển đến chữ 'A'. Khi giá trị Cảm biến khoảng cách báo cáo rằng Robot VR cách tường ít hơn 50 milimét (mm), Robot VR sẽ được hướng dẫn quay hoặc dừng trong dự án.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.