
Lezione 2: Guida alla lettera "A"
Guida fino alla lettera "A"
Ora che hai creato e testato un progetto che prevede l'arresto del robot VR una volta che il sensore di distanza rileva una parete, costruirai un progetto che fa navigare il robot VR fino alla lettera "A" sul parco giochi del labirinto a muro.

- Per guidare fino alla lettera "A", il robot VR dovrà rilevare due pareti e girare a sinistra quando vengono rilevate queste pareti. Quindi, il robot VR si fermerà quando rileverà la terza parete, situata dietro la lettera "A".
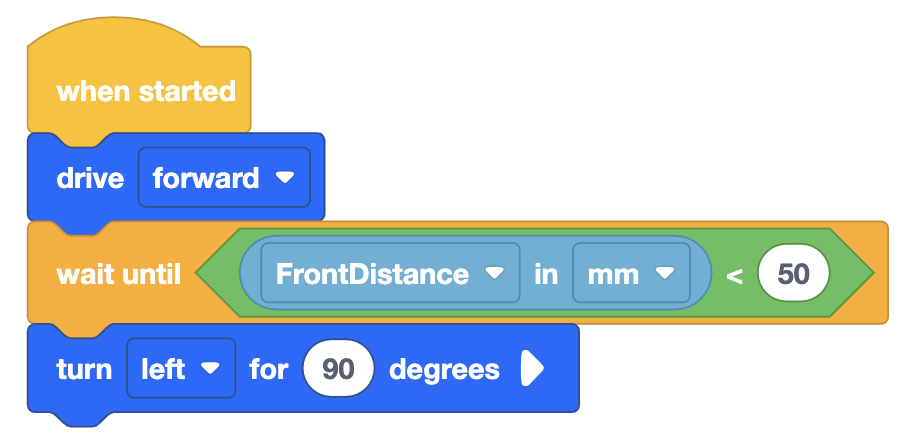
- Inizia modificando il progetto precedente o creando un nuovo progetto che corrisponda a questo progetto di base. Si noti che il blocco [Gira per] è necessario perché una volta che il sensore di distanza si trova entro 50 millimetri (mm) da una parete, il robot VR girerà a sinistra per continuare verso la lettera "A". Ricorda che puoi utilizzare blocchi VEXcode, blocchi Switch o una combinazione di entrambi i tipi di blocchi.
-
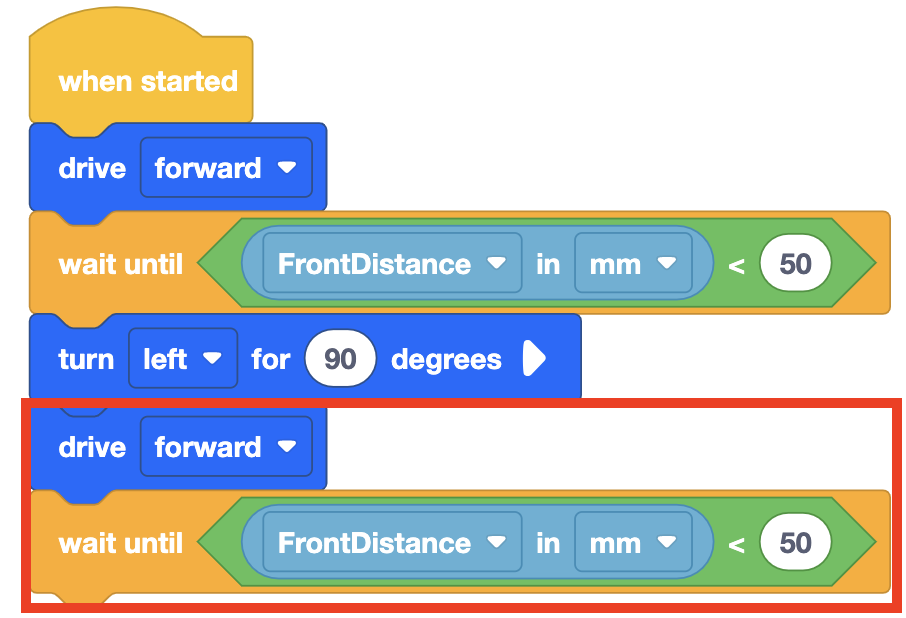
Aggiungere un altro blocco [Drive] e [Wait until] con il <Less than> blocco impostato su 50 millimetri (mm) e la (Distanza da) all'interno del <Less than> blocco.
Per tua informazione
Utilizzare lo strumento Duplica per le sezioni di codice che si ripetono in un progetto. Ciò consente di risparmiare tempo. Per maggiori informazioni su come duplicare i blocchi, consulta l'articolo Menu contestuale - Blocchi VR.
- Infine, aggiungi i seguenti blocchi per indicare al robot VR di rilevare la parete finale dietro la lettera "A", quindi smetti di guidare.

- Avviare il Wall Maze Playground se non è già aperto ed eseguire il progetto.
- Guarda il robot VR guidare dall'inizio del labirinto a muro alla lettera "A", quindi fermati.

- Si noti che il robot VR non urta contro alcun muro mentre si dirige verso la lettera "A". Quando il valore del sensore di distanza segnala che il robot VR si trova a meno di 50 millimetri (mm) dalla parete, il robot VR viene incaricato di girare o fermarsi nel progetto.
Selezionare il pulsante Avanti per continuare con il resto della lezione.