
Lección 2: Conducir hasta la letra ‘A’
Conduce hasta la letra "A"
Ahora que ha creado y probado un proyecto en el que el robot de realidad virtual se detiene una vez que el sensor de distancia detecta una pared, construirá un proyecto en el que el robot de realidad virtual navegue hasta la letra "A" en el patio de recreo del laberinto de paredes.

- Para conducir hasta la letra ‘A’, el robot VR deberá detectar dos paredes y girar a la izquierda cuando se detecten estas paredes. Luego, el VR Robot se detendrá cuando detecte la tercera pared, ubicada detrás de la letra ‘A’.
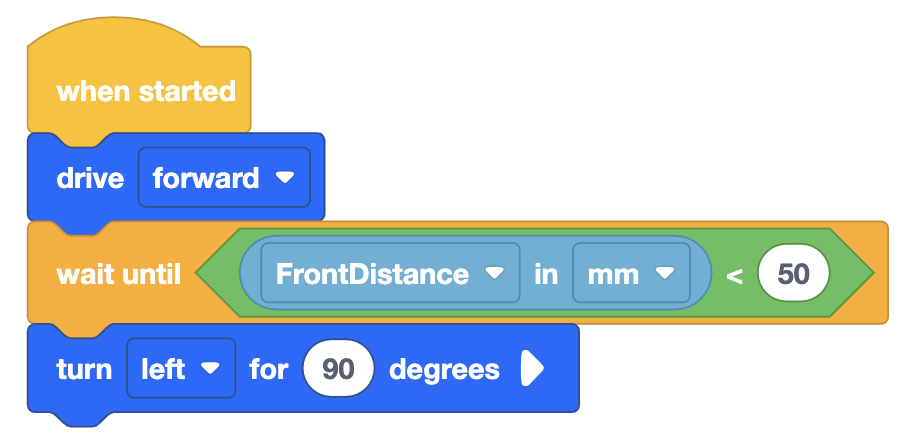
- Comience modificando el proyecto anterior o cree un nuevo proyecto para que coincida con este proyecto base. Tenga en cuenta que el bloque [Turn for] es necesario porque una vez que el sensor de distancia esté a menos de 50 milímetros (mm) de una pared, el robot VR girará a la izquierda para continuar hacia la letra ‘A’. Recuerda que puedes usar bloques VEXcode, bloques Switch o una combinación de ambos tipos de bloques.
-
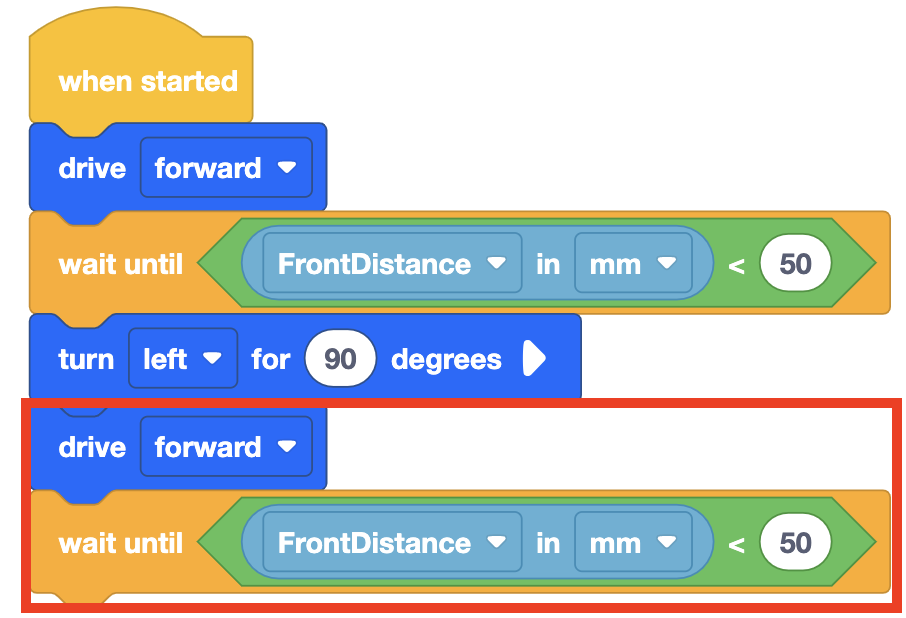
Añada otro bloque [Drive] y [Wait until] con el <Less than> bloque ajustado a 50 milímetros (mm) y la (Distance from) dentro del <Less than> bloque.
Para su información
Utilice la herramienta Duplicar para las secciones de código que se repiten en un proyecto. Esto le permite ahorrar tiempo. Para obtener más información sobre cómo duplicar bloques, consulte el artículo Menú contextual - Bloques VR.
- Finalmente, agregue los siguientes bloques para indicarle al robot de realidad virtual que detecte la pared final detrás de la letra ‘A‘ y luego deje de conducir.

- Inicie el Wall Maze Playground si aún no está abierto y ejecute el proyecto.
- Observa la unidad VR Robot desde el inicio del laberinto de pared hasta la letra ‘A’ y luego detente.

- Tenga en cuenta que el robot VR no choca contra ninguna pared mientras conduce hasta la letra "A". Cuando el valor del sensor de distancia informa que el robot VR está a menos de 50 milímetros (mm) de la pared, se le indica al robot VR que gire o se detenga en el proyecto.
Seleccione el botón Siguiente para continuar con el resto de esta lección.