
पाठ 2: अक्षर 'A' तक ड्राइव करें
अक्षर 'A' तक ड्राइव करें
अब जब आपने एक प्रोजेक्ट बनाया और उसका परीक्षण किया है जिसमें दूरी सेंसर द्वारा दीवार का पता लगाने पर VR रोबोट रुक जाता है, तो आप एक प्रोजेक्ट बनाएंगे जो VR रोबोट को दीवार भूलभुलैया खेल के मैदानपर अक्षर 'A' तक ले जाएगा।

- अक्षर 'ए' तक जाने के लिए, वीआर रोबोट को दो दीवारों का पता लगाना होगा, और जब ये दीवारें पता चल जाएंगी तो उसे बायीं ओर मुड़ना होगा। फिर, वीआर रोबोट तब रुक जाएगा जब वह अक्षर 'ए' के पीछे स्थित तीसरी दीवार का पता लगाएगा।
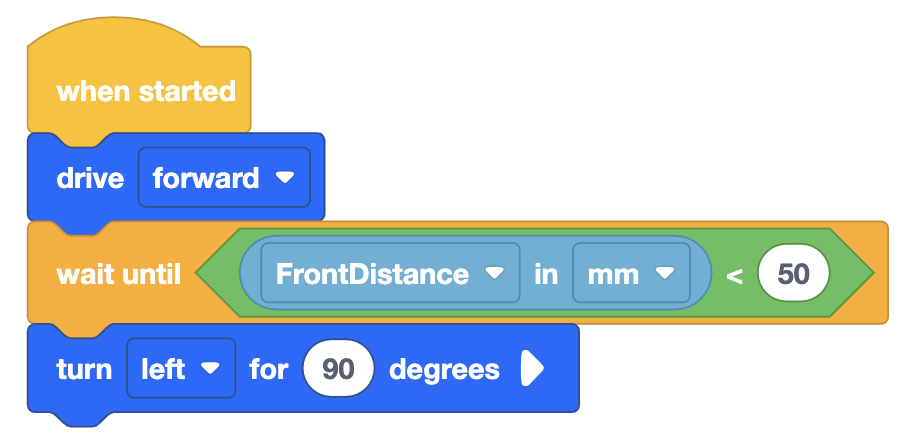
- पिछली परियोजना को संशोधित करके आरंभ करें या इस आधार परियोजना से मेल खाने वाली एक नई परियोजना बनाएं। ध्यान दें कि [टर्न फॉर] ब्लॉक की आवश्यकता है क्योंकि एक बार जब डिस्टेंस सेंसर दीवार के 50 मिलीमीटर (मिमी) के भीतर होता है, तो वीआर रोबोट अक्षर 'ए' की ओर बढ़ने के लिए बाएं मुड़ जाएगा। याद रखें कि आप VEXcode ब्लॉक, स्विच ब्लॉक या दोनों ब्लॉक प्रकारों के संयोजन का उपयोग कर सकते हैं।
-
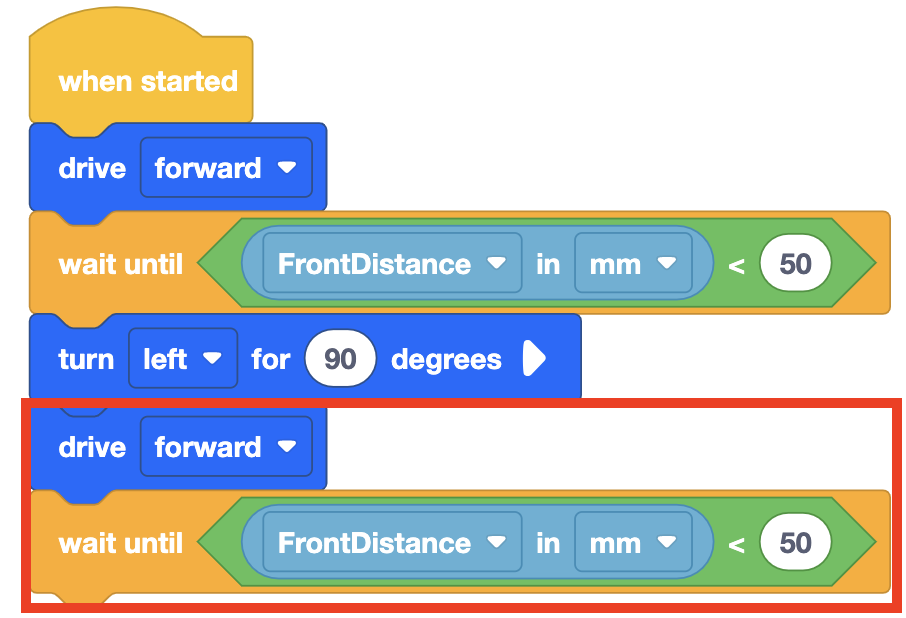
एक और [ड्राइव], और [प्रतीक्षा करें] ब्लॉक जोड़ें जिसमें <Less than> ब्लॉक 50 मिलीमीटर (मिमी) पर सेट हो, और (दूरी) <Less than> ब्लॉक के अंदर हो।
आपकी जानकारी के लिए
प्रोजेक्ट में दोहराए जाने वाले कोड के अनुभागों के लिए डुप्लिकेट टूल का उपयोग करें। इससे आपका समय बचेगा। ब्लॉकों की प्रतिलिपि बनाने के तरीके के बारे में अधिक जानकारी के लिए,संदर्भ मेनू - वीआर ब्लॉक लेख देखें।
- अंत में, निम्नलिखित ब्लॉकों को जोड़कर VR रोबोट को निर्देश दें कि वह अक्षर 'A' के पीछे अंतिम दीवार का पता लगाए और फिर गाड़ी चलाना बंद कर दे।

- यदि वॉल मेज़ प्लेग्राउंड पहले से खुला नहीं है तो उसे लॉन्च करें और प्रोजेक्ट चलाएं।
- वी.आर. रोबोट को दीवार भूलभुलैया के आरंभ से अक्षर 'ए' तक ड्राइव करते हुए देखें, और फिर रुक जाएं।

- ध्यान दें कि वीआर रोबोट अक्षर 'ए' की ओर जाते समय किसी दीवार से नहीं टकराता। जब दूरी सेंसर मान रिपोर्ट करता है कि वीआर रोबोट दीवार से 50 मिलीमीटर (मिमी) से कम दूरी पर है, तो वीआर रोबोट को प्रोजेक्ट में मुड़ने या रुकने का निर्देश दिया जाता है।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।