
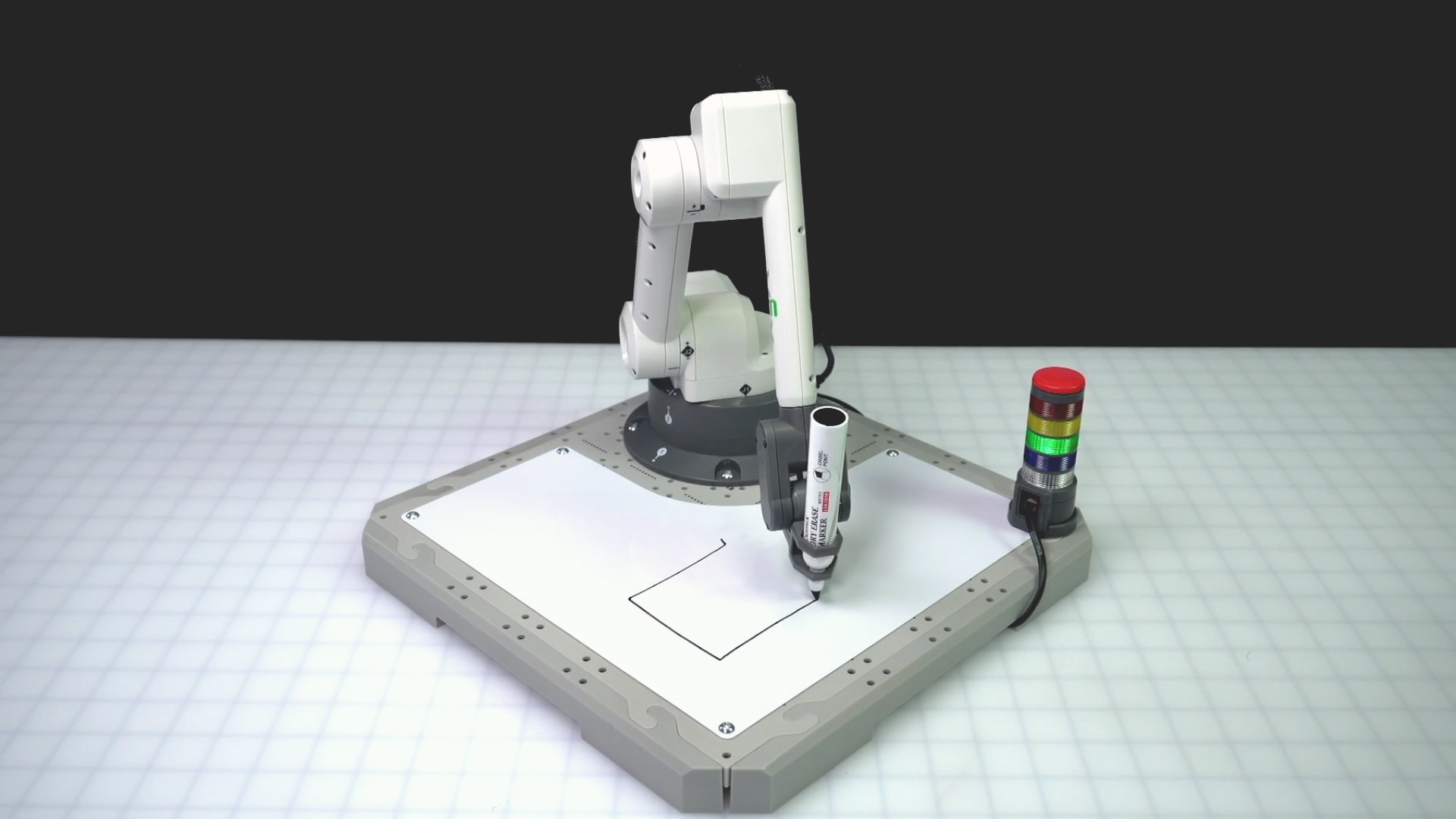
في السابق قمت بتحريك الذراع سداسي المحاور إلى إحداثيات محددة لرسم أشكال مختلفة. في هذا الدرس، ستتعلم طريقة أخرى لتحريك الذراع المكون من 6 محاور لرسم مربع. سيتم تعريفك بمفاهيم الحركة المطلقة والنسبية، بحيث يمكنك الجمع بين نوعي الحركة لترميز ذراع 6 محاور.
في هذا الدرس سوف تتعلم:
- الفرق بين الحركة المطلقة والنسبية.
- متى يتم تطبيق الحركة المطلقة أو النسبية في مشروع لتحريك الذراع سداسي المحاور على النحو المنشود.
- كيفية استخدام كتل موضع الزيادة في مشروع لترميز الحركات النسبية.
في نهاية هذا الدرس، ستقوم بترميز ذراع 6 محاور لرسم المربعات، باستخدام مزيج من الحركات المطلقة والنسبية.
رسم مربع بحركة مطلقة
في الوحدة السابقة، رسمت مربعًا من خلال العثور على إحداثيات كل نقطة، وتحريك الذراع سداسي المحاور إلى تلك المواقع المحددة. لنراجع هذه العملية، حتى نتمكن من الانتباه إلى نوع الحركة التي يستخدمها ذراع 6 محاور.
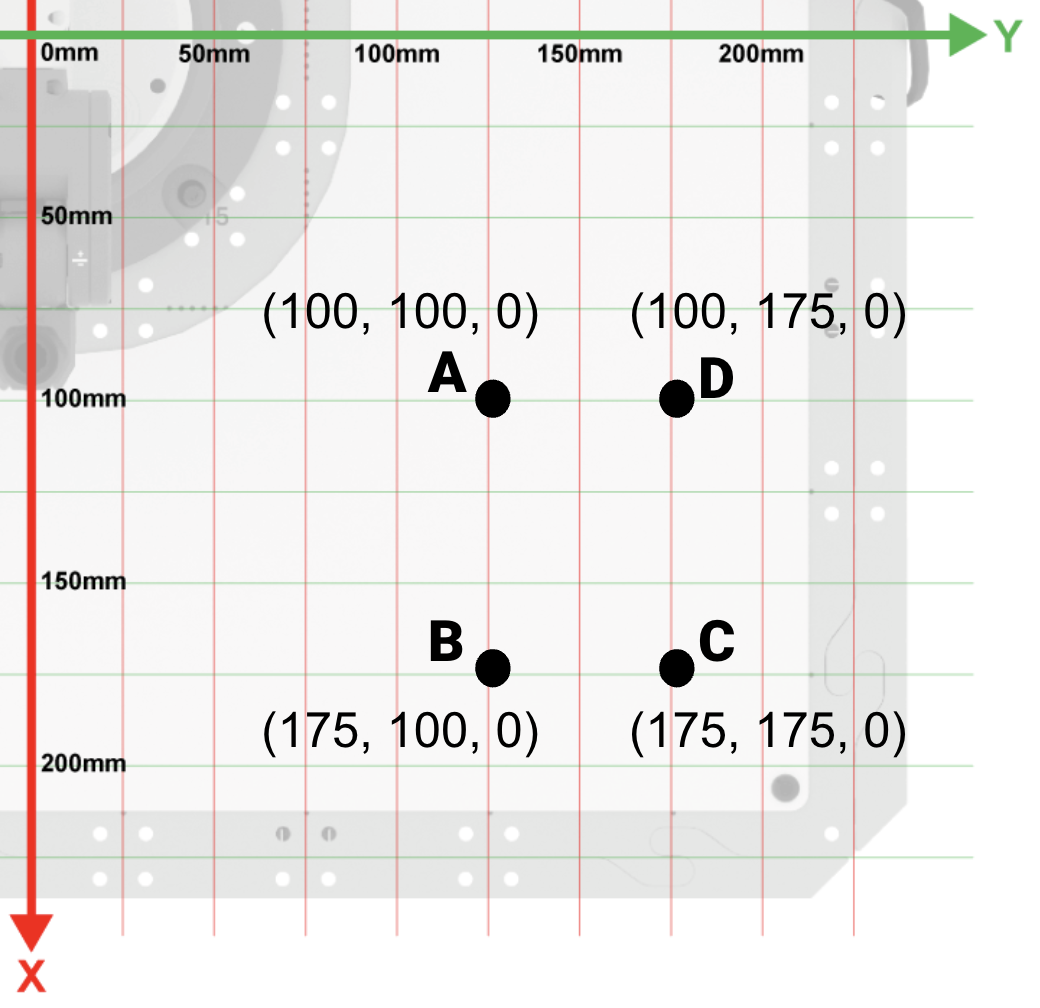
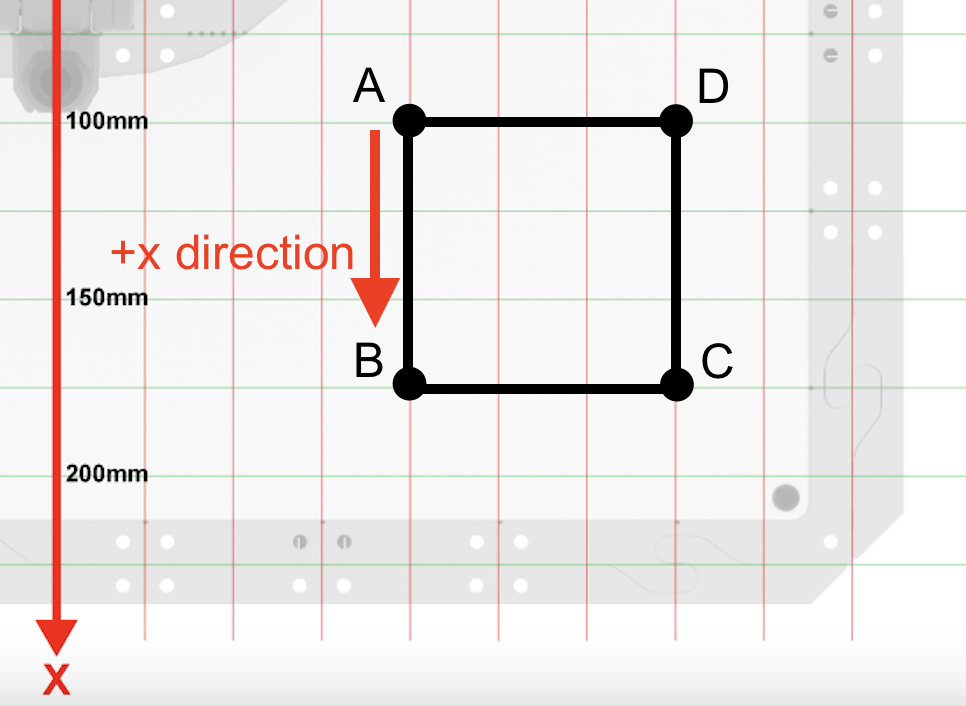
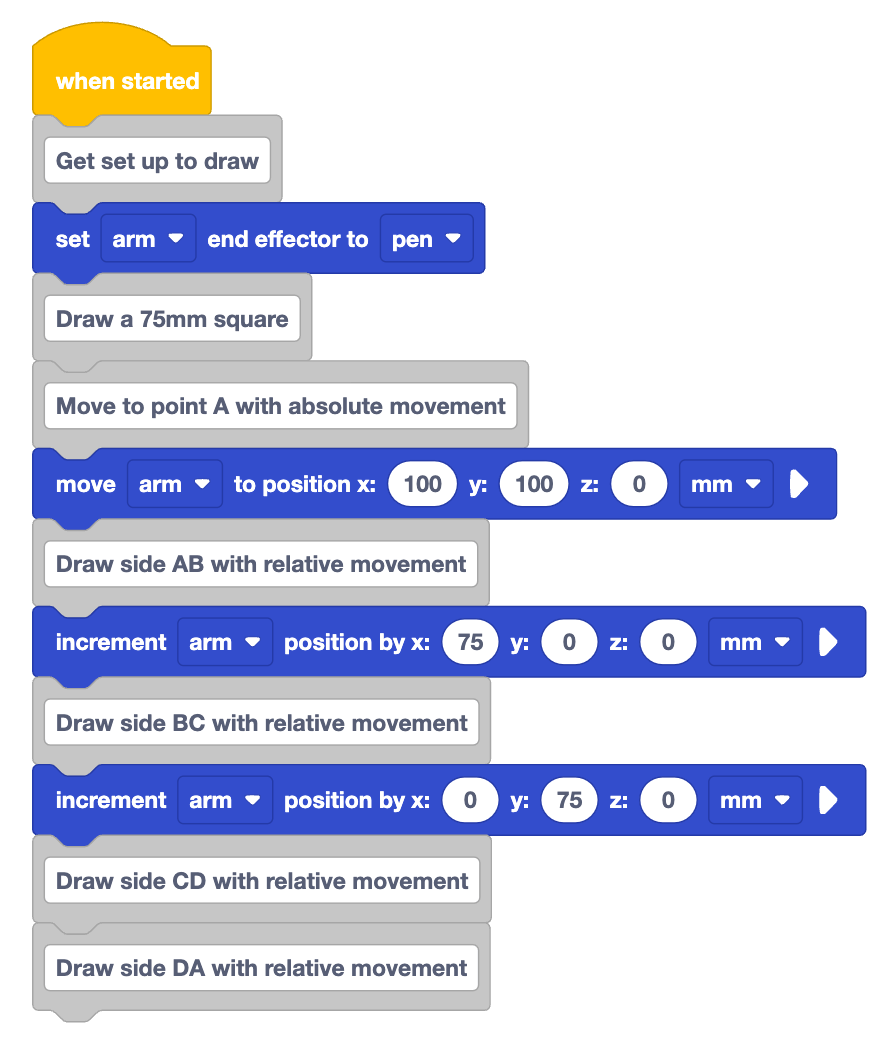
توثيق إحداثيات المربع ABCD.
في دفترك الهندسي، سجل المعلومات المعروفة عن المربع.
- طول كل جانب 75 مم
- النقطة أ هي (100، 100، 0)
- النقطة ب هي (175، 100، 0)
- النقطة ج هي (175، 175، 0)
- النقطة د هي (100، 175، 0)
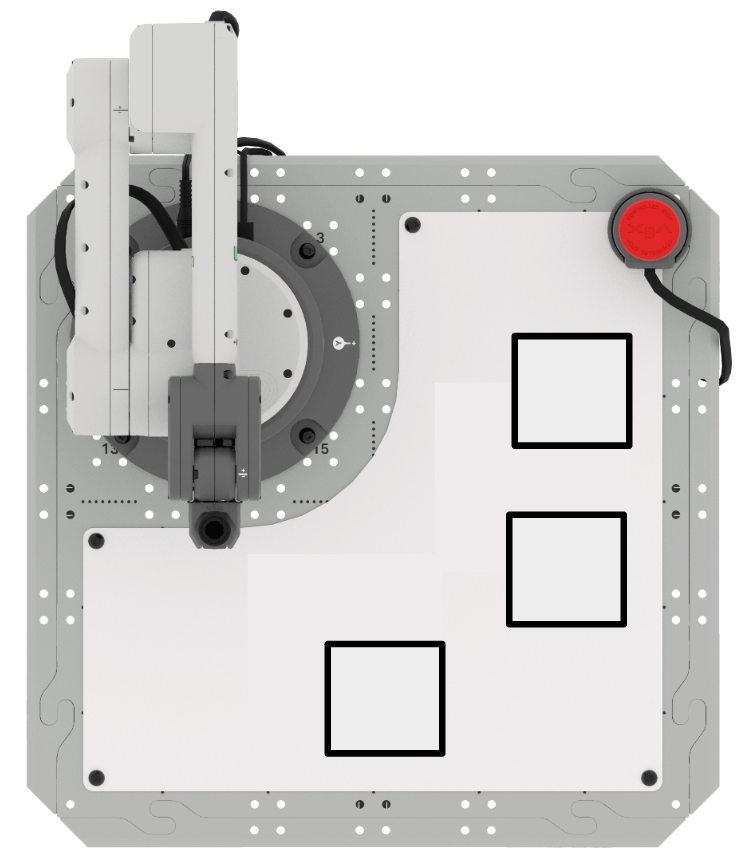
افتح مشروع كتل جديدة باتباع الخطوات الواردة في هذا الفيديو.
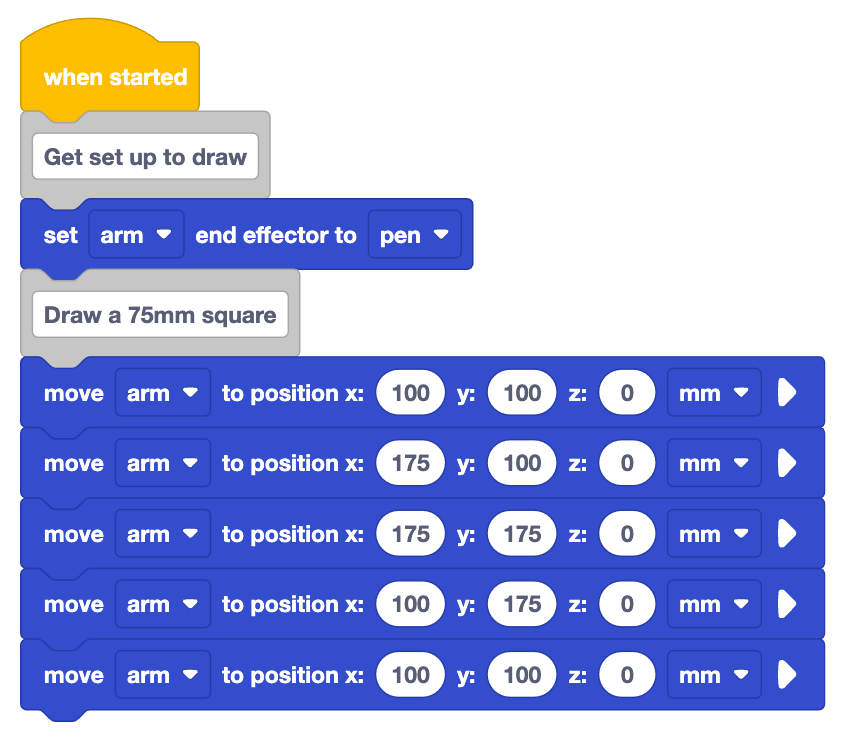
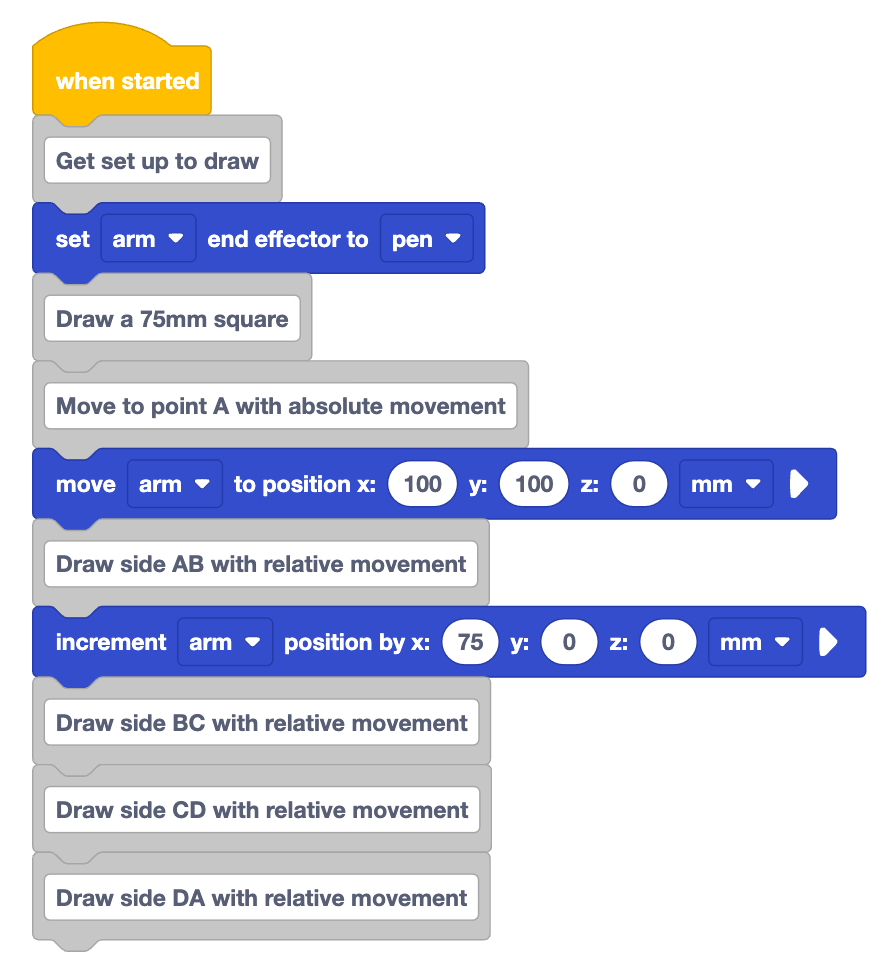
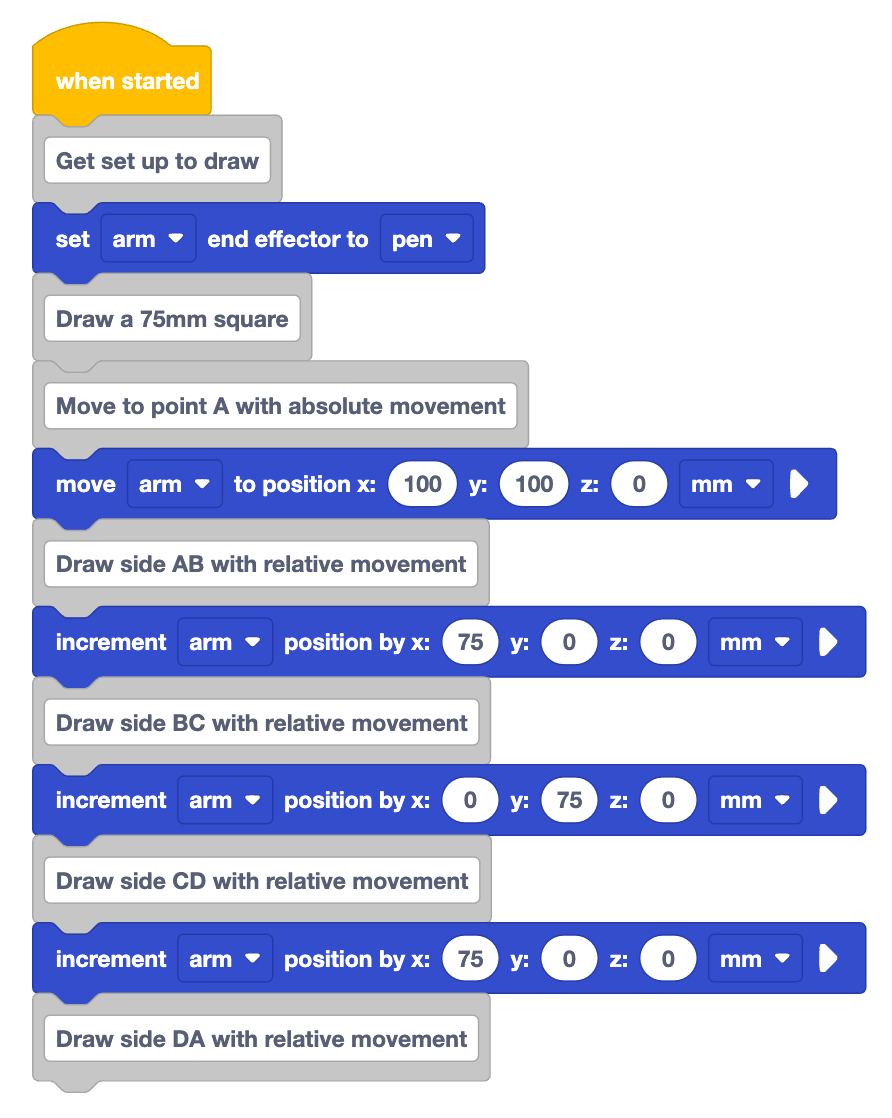
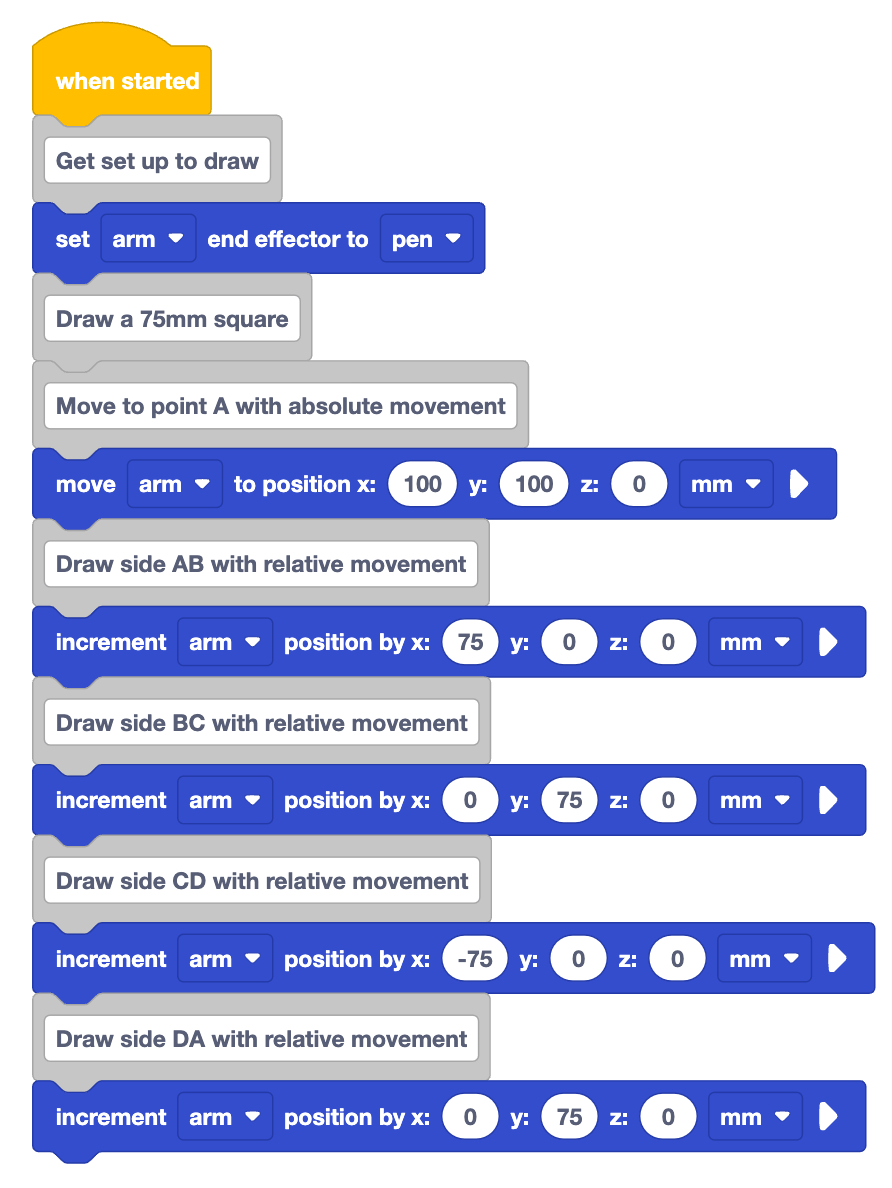
أعد إنشاء المشروع الموضح هنا في VEXcode.

انظر إلى الكتل في المشروع. ماذا تعتقد أن ذراع 6 محاور سيفعل عند تشغيل هذا المشروع ؟
سجل تنبؤك في دفتر ملاحظاتك الهندسي. صف كيف ستتحرك الذراع المكونة من 6 محاور بالكلمات، ورسم ما تعتقد أنه سيتم رسمه على السبورة البيضاء.
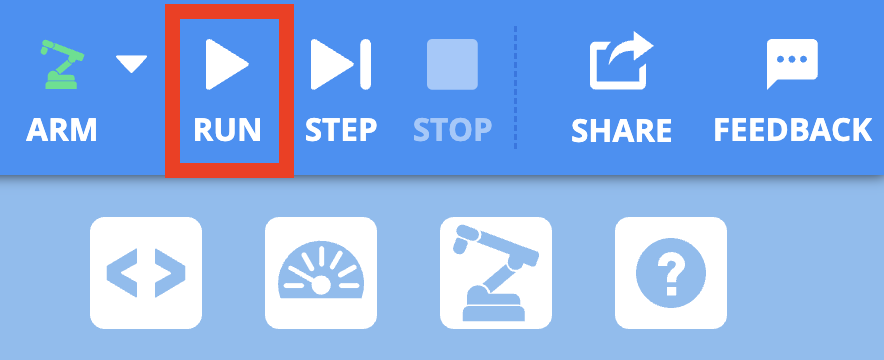
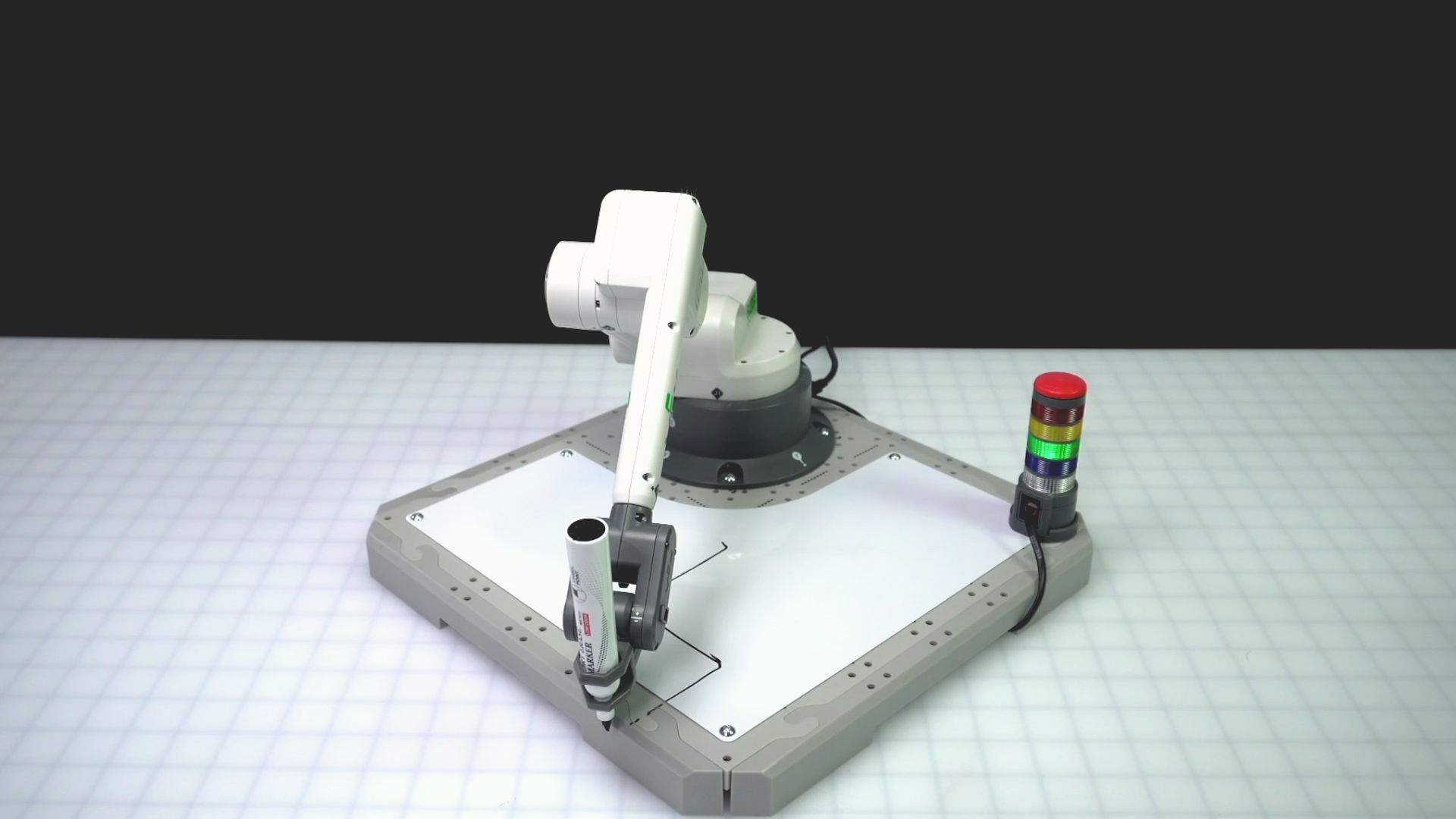
تأكد من توصيل ذراع 6 محاور برمز VEX. قم بتشغيل المشروع وراقب سلوك ذراع 6 محاور.
أوقف المشروع عند انتهاء ذراع 6 محاور من الحركة.
هل رسم الذراع سداسي المحاور ما توقعته ؟ لماذا أو لماذا لا ؟
في هذا المشروع، يستخدم ذراع 6 محاور حركة مطلقة لرسم المربع. وهذا يعني أن ذراع 6 محاور يتحرك إلى إحداثيات محددة من أجل رسم كل جانب من جوانب المربع. وسوف تصل إلى نفس تلك الإحداثيات بغض النظر عن المكان الذي تم فيه وضع ذراع 6 محاور من قبل. يمكن أن يكون هذا مفيدًا في بعض الأحيان، ولكنه يتطلب منا الحصول على إحداثيات دقيقة لكل نقطة في الشكل الذي نصنعه. هناك طريقة أخرى لاستخدام المعلومات حول الأطوال الجانبية في المشروع لرسم مربع.
رسم مربع بحركة نسبية
يساعدنا فهم أطوال جوانب المربع في معرفة مقدار ما يحتاجه ذراع 6 محاور للتحرك بالنسبة لموضعه الحالي لرسم كل جانب بدقة. بدلاً من تحديد جميع الزوايا الأربع للمربع، يمكننا ببساطة تحريك الذراع بالنسبة لنقطة البداية لإكمال الشكل.
ما هي الحركة النسبية ؟
تنقل الحركة النسبية الذراع سداسي المحاور إلى موضع جديد بناءً على موقعه الحالي. بالنظر إلى نقطة البداية، وأطوال جوانب المربع، يمكننا تحريك ذراع 6 محاور على طول المحور x والمحور y بالنسبة لموضع البداية. دعونا نقسم هذا إلى مربع 75 مم.
سنبدأ بحركة مطلقة للوصول إلى إحداثيات البداية. من هناك، يمكن رسم كل جانب بحركة نسبية. 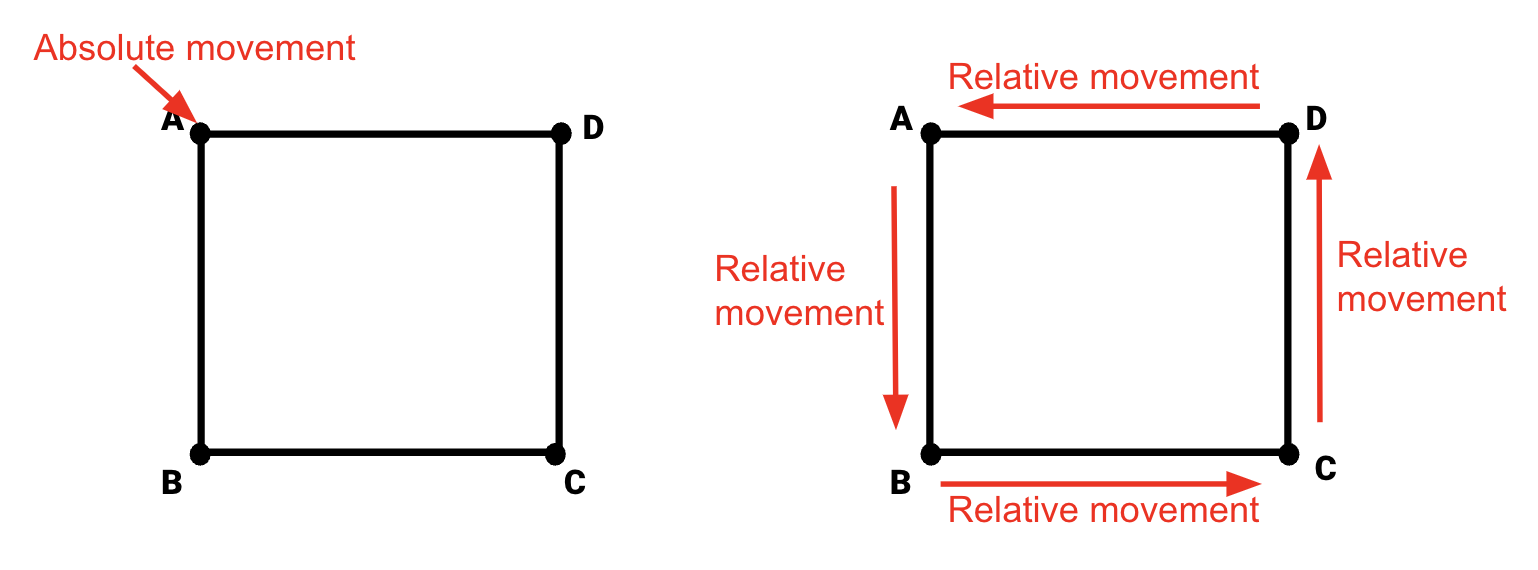
لنقم بتعديل مشروعنا لرؤية هذا قيد التنفيذ.
قم بإزالة كتل الانتقال إلى الموضع المستخدمة لرسم المربع.
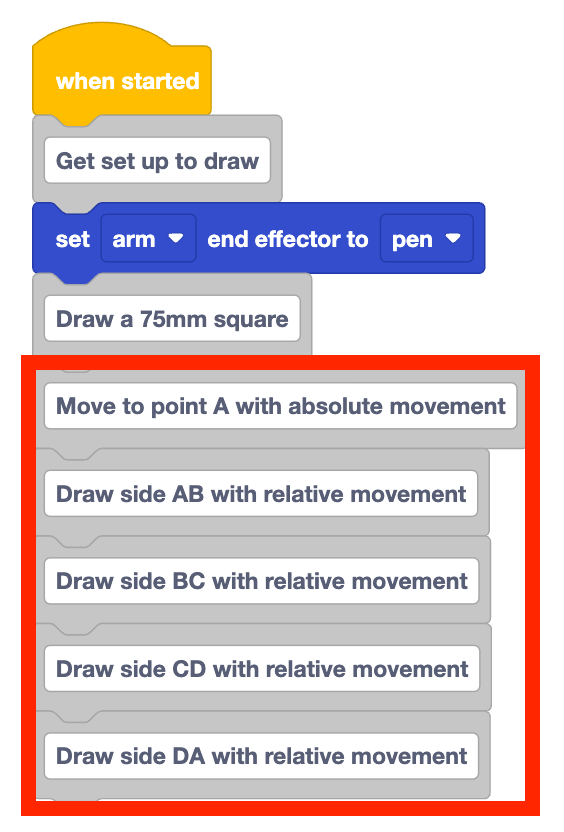
أضف خمس كتل تعليق إلى المشروع، لوصف حركة الذراع سداسي المحاور لرسم كل جانب من جوانب المربع. اكتب التعليقات التالية في المشروع:
- انتقل إلى النقطة "أ" بحركة مطلقة
- ارسم الجانب AB بحركة نسبية
- ارسم جانب BC بحركة نسبية
- ارسم القرص المضغوط الجانبي بحركة نسبية
- رسم الجانب DA بحركة نسبية
تعد إضافة تعليقات كهذه مفيدة للبقاء منظمًا، وإظهار الخطوات اللازمة بالتسلسل لإكمال المهمة المطروحة.
رسم الجانب AB مع حركة نسبية

أضف كتلة نقل إلى الموضع أسفل التعليق "نقل إلى النقطة A بحركة مطلقة". أدخل إحداثيات البداية (النقطة أ) في المعلمات.
- النقطة أ (100، 100، 0)
يبدأ هذا المشروع بنفس المشروع السابق، حيث يبدأ بحركة مطلقة.
لرسم الجانب AB بحركة نسبية، سنستخدم كتلة موضعالزيادة. 
تحرك كتلة موضع الزيادة ذراع 6 محاور لمسافة معينة على طول المحاور x و y و z. هذه هي الكتلة التي سنستخدمها لتحريك الذراع سداسي المحاور بحركة نسبية. تقوم كتلة موضع الزيادة بتحريك الذراع سداسي المحاور لمسافة بالنسبة لموقعها الحالي.
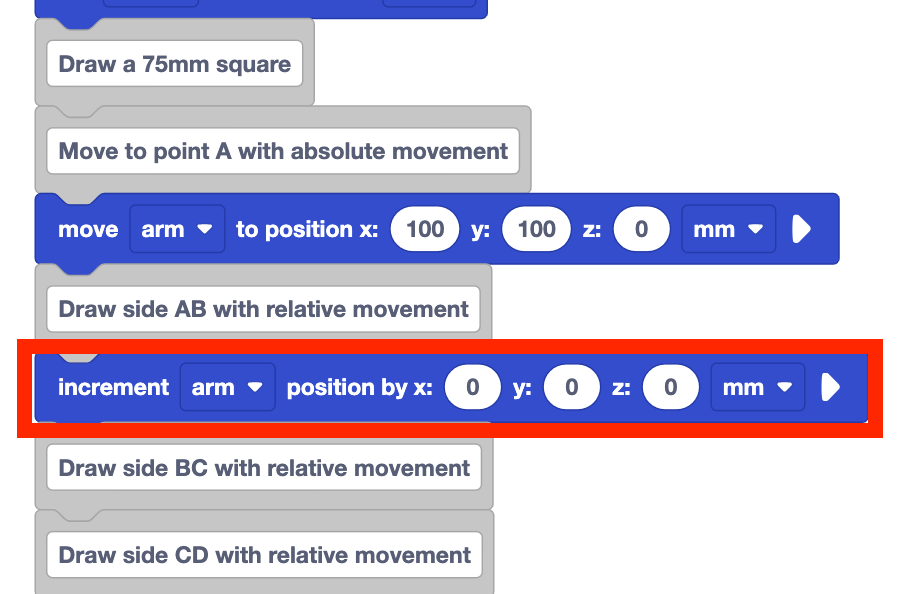
أضف كتلة موضع زيادة أسفل التعليق "ارسم الجانب AB بحركة نسبية".
لاحظ أن كتلة موضع الزيادة لها معلمات للمحور x و y و z. يرتبط هذا بمدى تحرك الذراع سداسي المحاور على طول كل محور، أو الحركة النسبية للذراع سداسي المحاور على كل محور. هذه المعلمات ليست قيمة إحداثية، كما كانت في كتلة الانتقال إلى الموضع، عندما استخدم ذراع 6 محاور الحركة المطلقة.
لتحديد المعلمة(المعلمات) اللازمة لرسم جانب من المربع، هناك حاجة إلى جزأين من المعلومات:
- المسافة لتحريك الذراع سداسي المحاور بالنسبة للموضع الحالي
- المحور أو المحاور التي سيتحرك بها الذراع سداسي المحاور
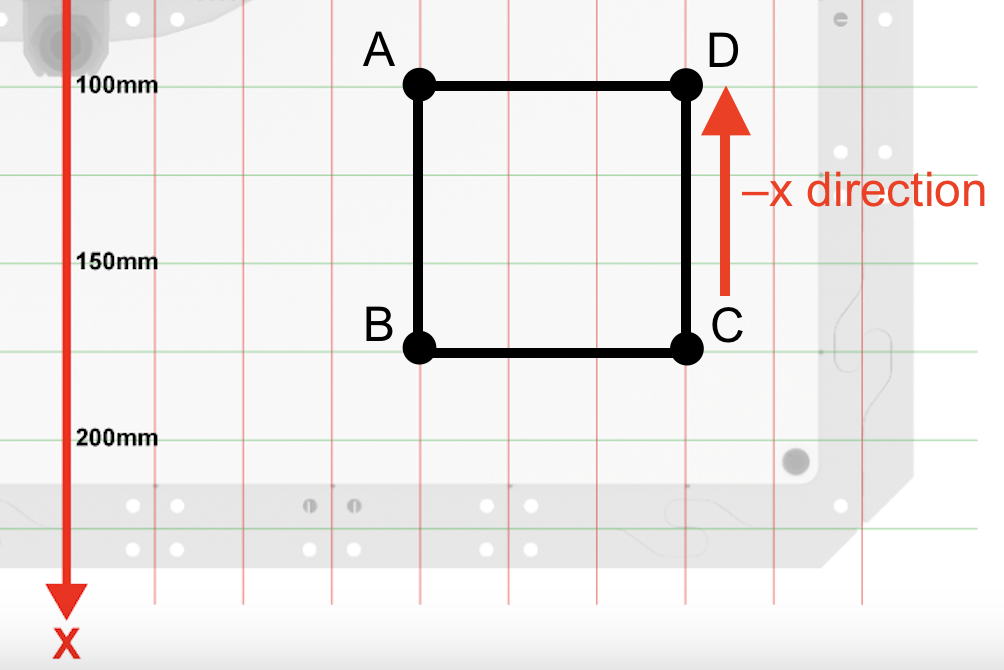
لرسم الجانب AB من المربع، فإن المسافة التي سيتحركها ذراع 6 محاور بالنسبة للموضع الحالي هي طول الجانب، أو 75 مم. للانتقال من النقطة A إلى النقطة B، سيتحرك الذراع ذو 6 محاور على طول المحور x في الاتجاه الموجب. لن يتحرك على طول المحاور y أو z.
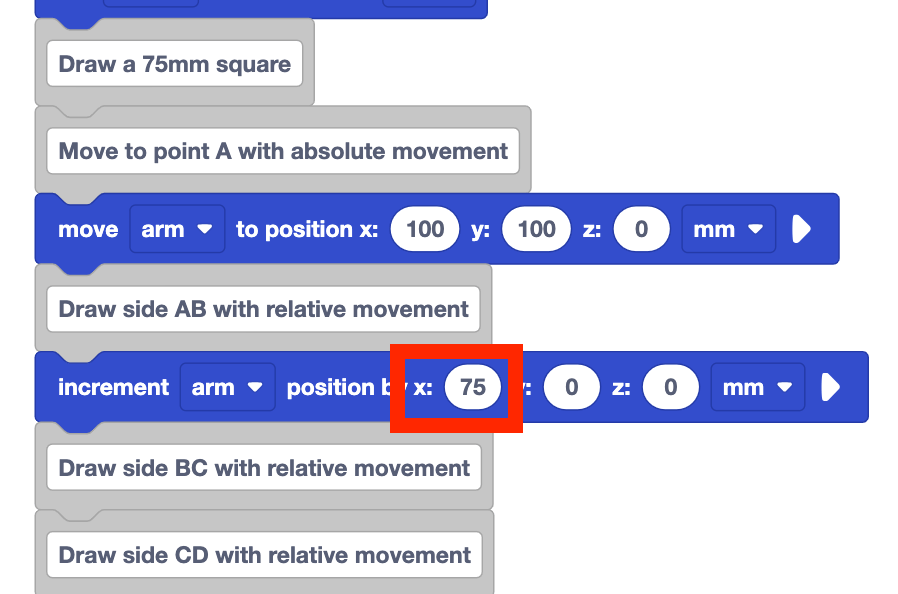
اضبط المعلمة x على 75 في كتلة موضع الزيادة. تظل المعلمات y و z 0.
سيؤدي ذلك إلى تحريك الذراع المكون من 6 محاور لمسافة 75 مم على طول المحور x فقط، في الاتجاه الموجب.
انظر إلى المشروع كما هو الآن. ماذا تعتقد أن هذا سيؤدي إلى قيام ذراع 6 محاور عند تشغيله ؟
سجل تنبؤك في دفتر ملاحظاتك الهندسي. ارسم ما تعتقد أن الذراع المكون من 6 محاور سيرسمه.

تأكد من توصيل ذراع 6 محاور برمز VEX. قم بتشغيل المشروع وراقب سلوك ذراع 6 محاور.
أوقف المشروع عندما يتوقف ذراع 6 محاور عن الحركة.
هل تحرك الذراع سداسي المحاور كما توقعت ؟ لماذا أو لماذا لا ؟
جانب الرسم BC مع حركة نسبية
يمكننا تطبيق ما تعلمناه لرسم الضلع الأول من المربع، لرسم الضلع BC.
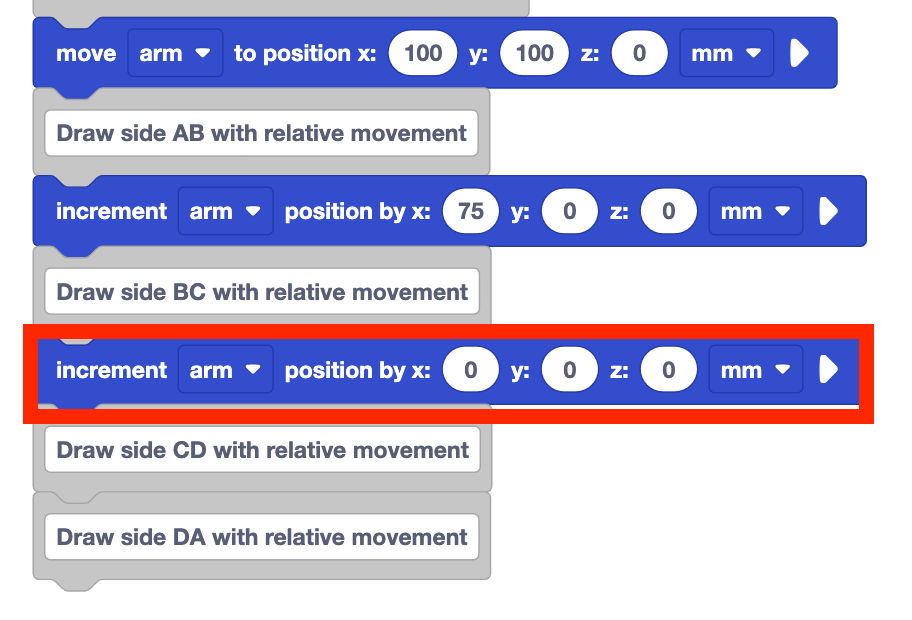
أضف كتلة موضع زيادة أسفل التعليق "ارسم جانب BC بحركة نسبية".
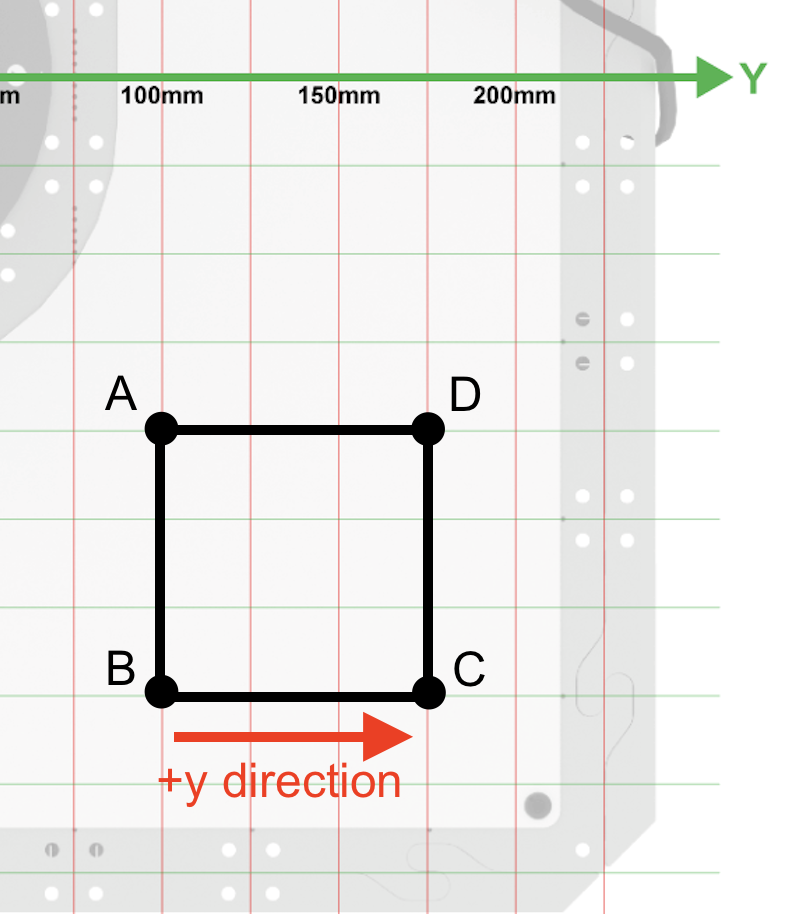
تحديد معلمات كتلة موضع الزيادة.
لرسم جانب BC، يجب أن يتحرك الذراع سداسي المحاور لمسافة 75 مم. بالنظر إلى اتجاه الحركة بالنسبة للموضع الحالي، نرى أن الذراع سداسي المحاور يحتاج إلى التحرك على طول المحور الصادي. يجب ألا يتحرك الذراع المكون من 6 محاور على طول المحاور x أو z.
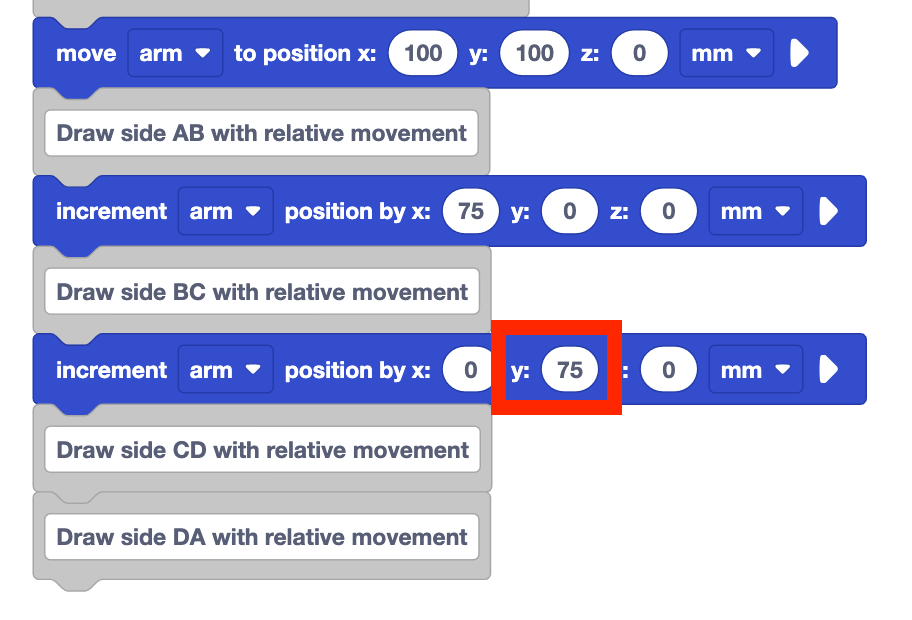
اضبط المعلمة y لكتلة موضع الزيادة على 75.
سيؤدي ذلك إلى تحريك الذراع سداسي المحاور لمسافة 75 مم على طول المحور الصادي. نظرًا لأن معلمات المحاور x و z هي 0، فلن يتحرك ذراع 6 محاور على المحاور x أو z.
توقع كيف تعتقد أن الذراع المكون من 6 محاور سيتحرك عند تشغيل المشروع. سجل تنبؤك في دفتر ملاحظاتك الهندسي.
ارسم ما تعتقد أن الذراع المكون من 6 محاور سيرسمه.
قم بتشغيل المشروع وراقب سلوك ذراع 6 محاور.
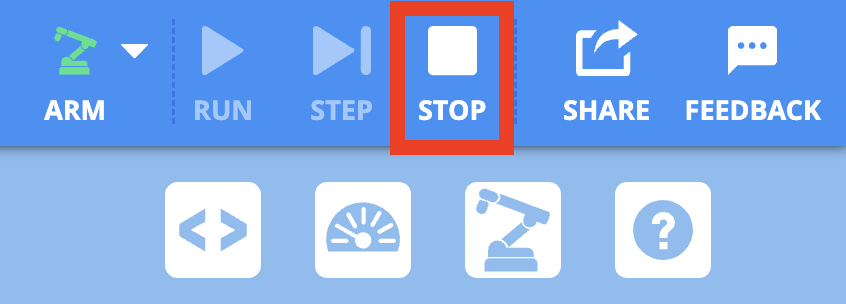
أوقف المشروع عند انتهاء ذراع 6 محاور من الحركة.
هل رسم الذراع سداسي المحاور ما توقعته ؟ لماذا أو لماذا لا ؟
قرص مضغوط جانبي للرسم مع حركة نسبية
الآن بعد أن رسمنا أول جانبين من المربع، يمكننا الاستمرار في البناء على مشروعنا لرسم القرص المضغوط الجانبي.
أضف كتلة موضع زيادة أسفل التعليق "ارسم القرص المضغوط الجانبي بحركة نسبية".
تحديد المعلمات لكتلة موضع الزيادة.
لرسم القرص المضغوط الجانبي، لا يزال طول الجانب 75 مم. بالنظر إلى اتجاه تلك الحركة بالنسبة إلى الموضع الحالي للذراع سداسي المحاور، نرى أن الحركة مرة أخرى على طول المحور س.
يجب ألا يتحرك ذراع 6 محاور على المحاور y أو z على هذا الجانب من المربع.

اضبط معلمة x لكتلة موضع الزيادة على 75.
توقع كيف تعتقد أن الذراع المكون من 6 محاور سيتحرك عند تشغيل المشروع. سجل تنبؤك في دفتر ملاحظاتك الهندسي، وتأكد من تضمين رسم تخطيطي لما تعتقد أنه سيتم رسمه.

قم بتشغيل المشروع وراقب سلوك ذراع 6 محاور.
هل رسمت ما تنبأت به ؟ لماذا أو لماذا لا ؟
لم يرسم الذراع ذو 6 محاور القرص المضغوط الجانبي على النحو المنشود.
دعونا نلقي نظرة على سبب حدوث ذلك. لم يتغير طول الضلع، وبالتالي فإن طول الخط المرسوم صحيح. ومع ذلك، فإن اتجاه تلك الحركة ليس كذلك.
يمكننا حساب التحرك في اتجاه إيجابي أو سلبي عن طريق إدخال المعلمة في كتلة موضع الزيادة كرقم إيجابي أو سلبي.
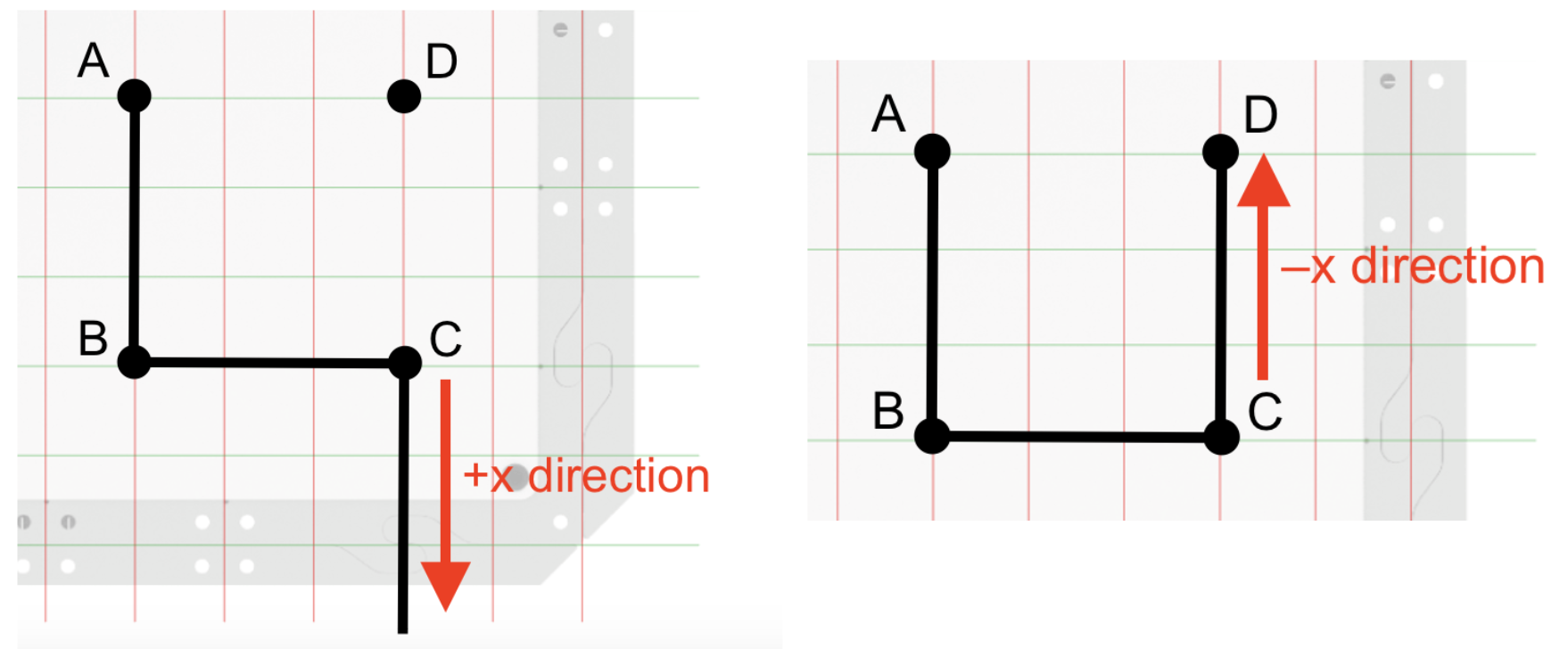
بالنسبة للجانبين AB و BC، كان ذراع 6 محاور يتحرك في الاتجاه الموجب على طول المحورين x و y،
لذلك استخدمنا عددًا موجبًا. ولكن لرسم القرص المضغوط الجانبي، يجب أن يتحرك ذراع 6 محاور
في الاتجاه السالب، لذلك سنحتاج إلى استخدام قيمة سالبة في
المعلمة.
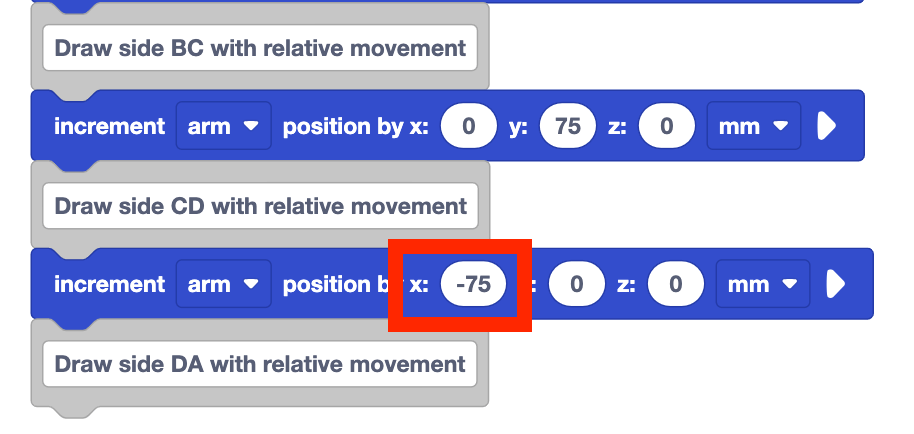
اضبط معلمة x لكتلة موضع الزيادة على –75.
سيؤدي ذلك إلى تحريك الذراع المكون من 6 محاور لـ 75 مم في الاتجاه السالب على طول المحور x. لا تحتاج قيم المحور y و z إلى التغيير، حيث أن ذراع 6 محاور لا يزال لا يتحرك على طول تلك المحاور لرسم القرص المضغوط الجانبي.
قم بتشغيل المشروع مرة أخرى، ولاحظ سلوك ذراع 6 محاور.
هل تم رسم القرص المضغوط الجانبي على النحو المنشود ؟ لماذا أو لماذا لا ؟
رسم الجانب DA مع حركة نسبية
الآن بعد أن أصبح لدينا ثلاثة أضلاع من المربع مرسومة، يمكننا تطبيق ما تعلمناه لرسم الضلع الأخير.
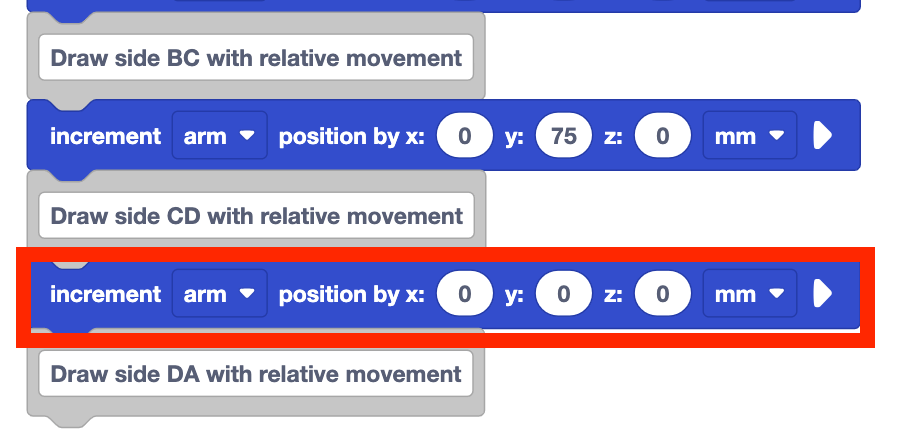
أضف كتلة موضع زيادة أسفل التعليق "ارسم جانب DA بحركة نسبية".

تحديد المعلمات لكتلة موضع الزيادة.
لرسم الجانب DA، يتحرك ذراع 6 محاور مرة أخرى لمسافة 75 مم. بالنظر إلى اتجاه تلك الحركة بناءً على الموضع الحالي، سيحتاج الذراع ذو 6 محاور إلى التحرك على طول المحور الصادي مرة أخرى. لا تحتاج إلى التحرك على طول المحاور x أو z لرسم DA الجانبي.
اضبط المعلمة y لكتلة موضع الزيادة على 75. يجب أن تظل المعلمات x و z 0.
تنبأ بكيفية تحرك الذراع سداسي المحاور وما الذي سيرسمه عند تشغيل المشروع. سجل تنبؤك في دفتر ملاحظاتك الهندسي.

قم بتشغيل المشروع وراقب سلوك ذراع 6 محاور.
هل يتحرك كما توقعت ؟ هل يرسم الجانب الأخير من المربع على النحو المنشود ؟ لماذا أو لماذا لا ؟
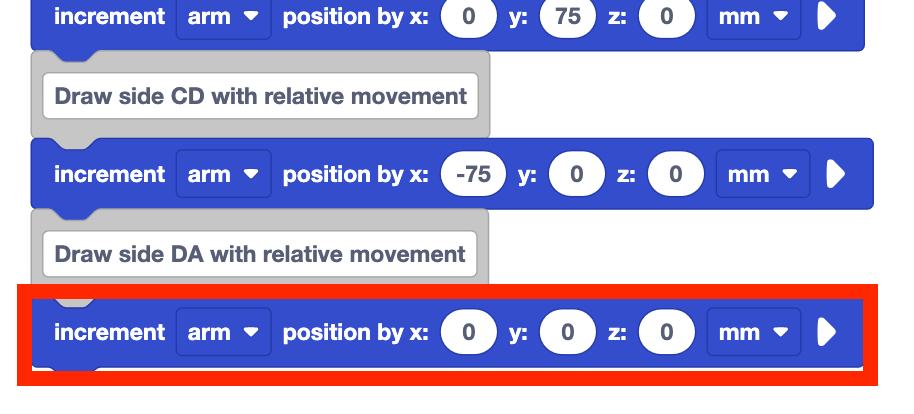
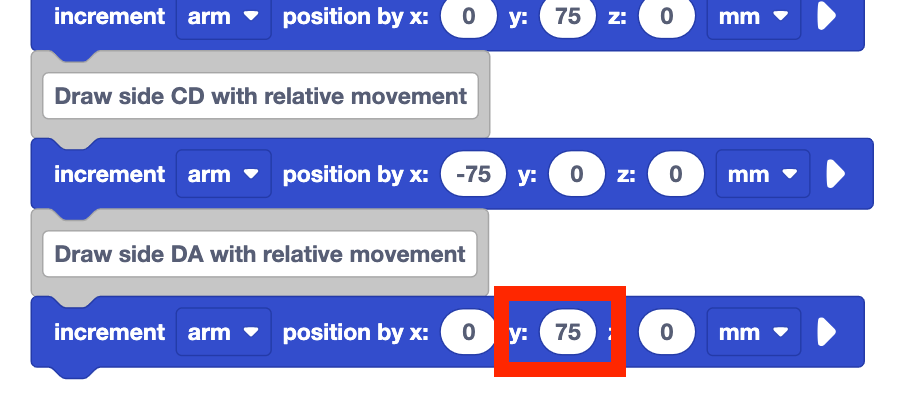
لرسم DA الجانبي على النحو المنشود، احتاج الذراع سداسي المحاور إلى التحرك في الاتجاه السلبي على طول المحور الصادي. ومع ذلك، قمنا بتعيين المعلمة y على 75 مم، مما يشير إلى أن الذراع سداسي المحاور يجب أن يتحرك في الاتجاه الموجب على طول المحور y.

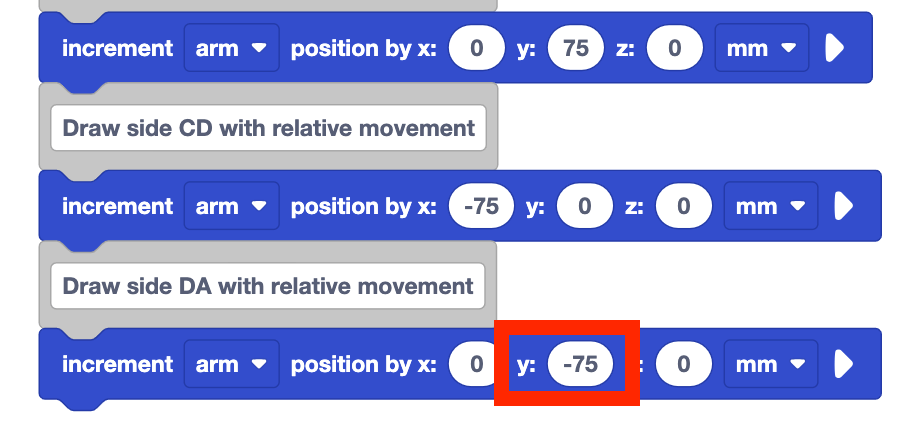
اضبط المعلمة y لكتلة موضع الزيادة النهائية على –75. يجب أن تظل معاملات x و z 0، حيث لا يحتاج ذراع 6 محاور إلى التحرك على هذه المحاور لرسم DA الجانبي على النحو المنشود.
يجب أن يتحرك الذراع سداسي المحاور الآن على طول المحور ص في الاتجاه السالب لإكمال المربع.
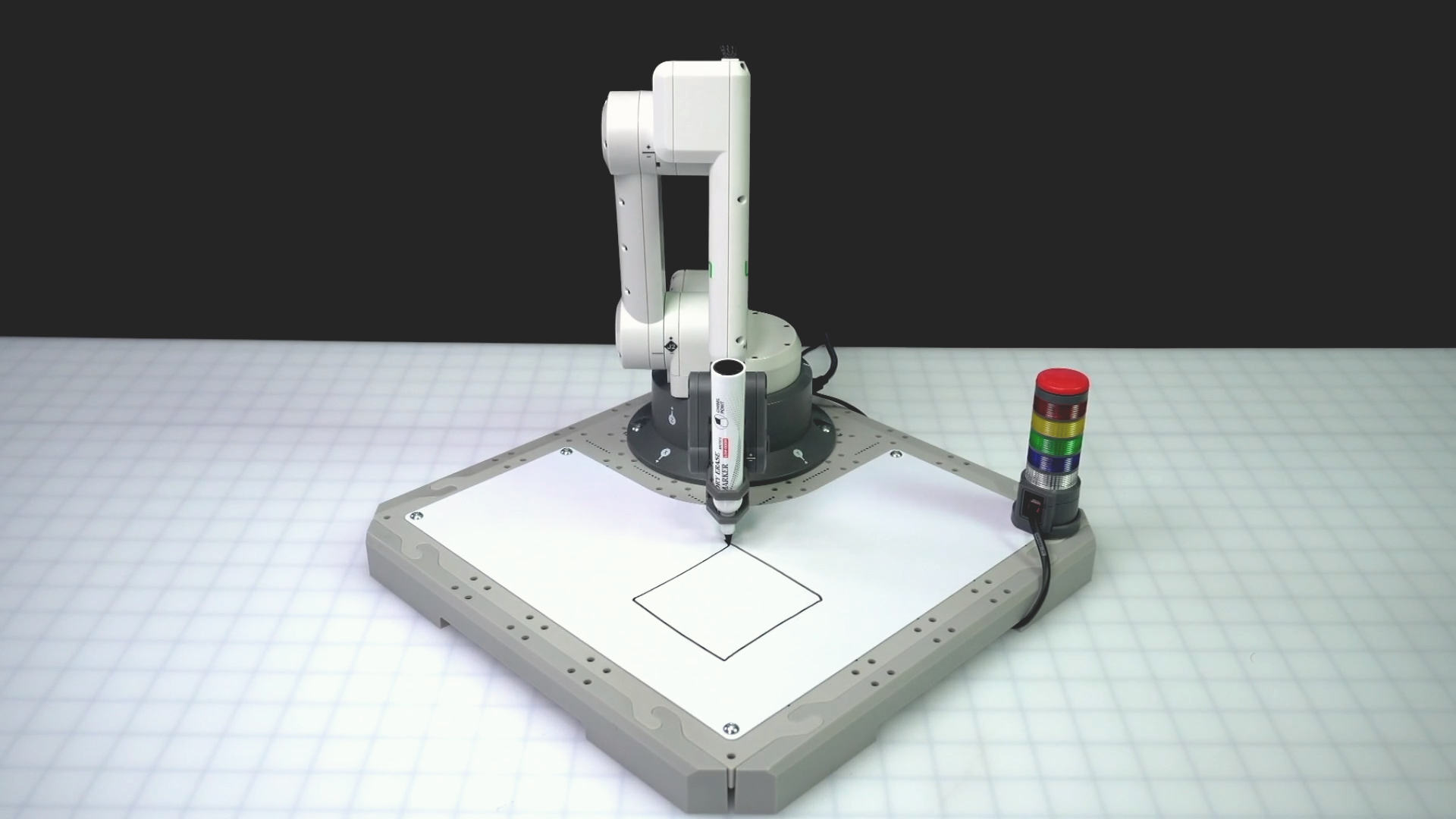
قم بتشغيل المشروع وراقب حركة ذراع 6 محاور.
هل يرسم المربع كما هو مقصود ؟ لماذا أو لماذا لا ؟

تأكد من إعادة تسمية مشروعك وحفظه.
لماذا تستخدم الحركة النسبية ؟
في حين أن حركة الذراع سداسي المحاور هي نفسها لرسم مربع 75 مم بحركة مطلقة ونسبية، إلا أن هناك مرونة وسهولة إضافية عند استخدام الحركة النسبية. على سبيل المثال، إذا أردت رسم مربع 75 مم في موقع مختلف، فماذا ستفعل ؟ باستخدام الحركة المطلقة، ستجد الإحداثيات الجديدة لجميع النقاط الأربع وترميز ذراع 6 محاور لربطها. ومع ذلك، باستخدام الحركة النسبية، تحتاج فقط إلى معرفة إحداثيات البداية، والباقي يبقى كما هو.
ستأخذك الحركة المطلقة دائمًا إلى نفس الإحداثيات، بغض النظر عن موقع البدء. هذا مفيد عندما تحتاج إلى نقل ذراع 6 محاور إلى موقع معين لبدء مشروع، أو لضمان وصولك إلى هذا الموقع بغض النظر عن الإحداثيات السابقة.
ستنتقل الحركة النسبية إلى موقع جديد بناءً على الموضع الحالي. هذا مفيد عندما تحتاج إلى تحريك ذراع 6 محاور فيما يتعلق بموقع معروف، كما فعلت عند رسم مربع أو التحرك في نمط معين.
استخدم كلا المشروعين في هذا الدرس نفس المعلومات، لكن طريقة استخدامها في الكود كانت مختلفة. دعونا نلقي نظرة على مشاريعنا بمزيد من التفصيل. الصورة على اليسار هي من مشروع حركتنا المطلقة. يتوافق طول الجانب البالغ 75 مم مع التغيير في الإحداثي x اللازم للانتقال من النقطة A إلى النقطة B.
الصورة على اليمين من مشروع حركتنا النسبية. هنا يتوافق طول الجانب 75 مم مع مدى تحرك الذراع
سداسي المحاور على طول المحور س. 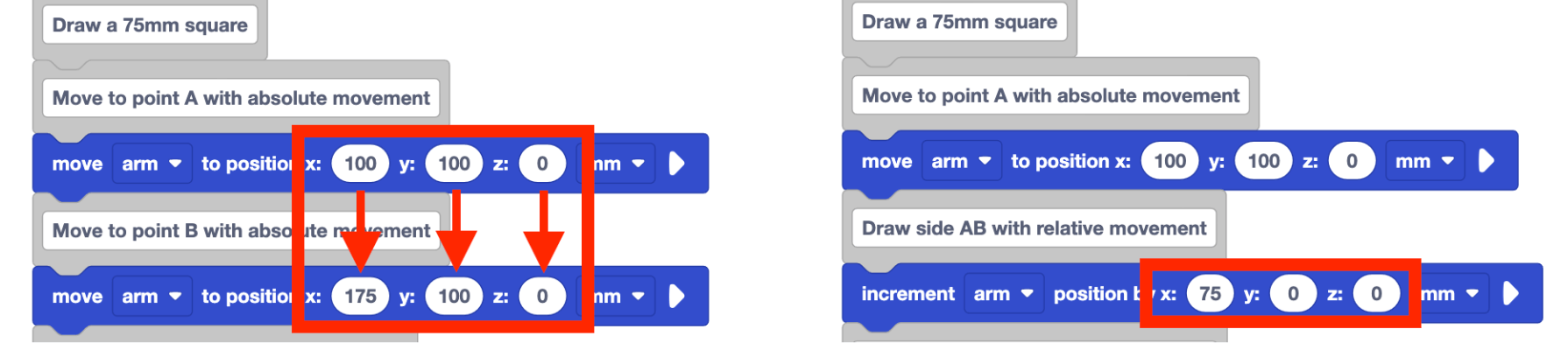
يمكن أن يمنحك استخدام الحركة النسبية مرونة إضافية في مشروعك، لذا اجعل تكييف وتعديل التعليمات البرمجية الخاصة بك لأغراض مختلفة أكثر بساطة.
النشاط
الآن بعد أن قمت بترميز ذراع المحور 6 محاور للتحرك باستخدام كل من الحركة المطلقة والنسبية، فقد
حان الوقت لممارسة هذه المهارات. في هذا النشاط، ستقوم بتحرير مشروعك لترميز ذراع 6 محاور لرسم
ثلاثة مربعات على السبورة البيضاء. 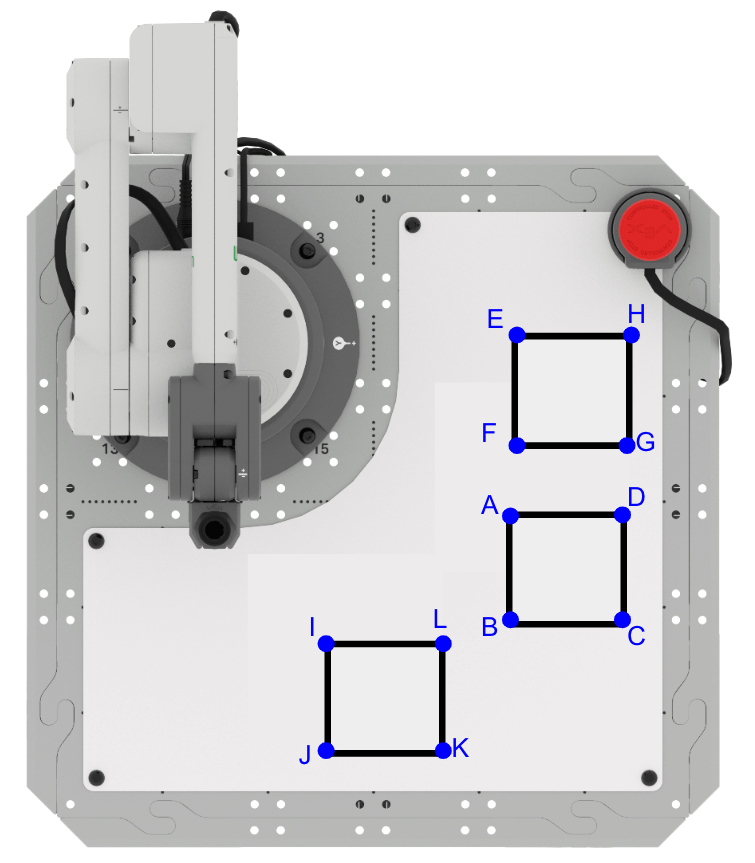
الإعداد: سجل المعلومات التالية في دفتر ملاحظات الهندسة الخاص بك.
- إحداثيات البداية لكل مربع هي كالتالي:
- مربع ABCD (100، 150، 0)
- EFGH مربع (-5، 153، 0)
- مربع IJKL (155، 57، 0)
- جميع الأطوال الجانبية للمربعات الثلاثة هي 50 مم.
- لا يمكن للمربعات أن تلمس بعضها البعض.
نشاط: قم بالبناء على مشروعك من هذا الدرس لترميز ذراع 6 محاور لرسم مربعين إضافيين.
- سجل خطة لمشروعك في دفترك الهندسي. تأكد من موافقة مجموعتك على المربع الذي يجب رسمه أولاً وثانياً وثالثاً، بالإضافة إلى أنواع الحركات التي ستستخدمها لإكمال الرسومات.
- قم بالبناء على مشروعك من هذا الدرس لمتابعة خطتك في دفتر الملاحظات الهندسي الخاص بك.
- قم بتشغيل مشروعك لاختباره. تأكد من توصيل ذراعك المكون من 6 محاور برمز VEX. هل يرسم مشروعك المربعات الثلاثة على النحو المنشود ؟ لماذا أو لماذا لا ؟
- استمر في التكرار في مشروعك حتى تتمكن من رسم المربعات الثلاثة بنجاح. قم بتسمية مشروعك
وحفظه عند الانتهاء.
تحقق من فهمك
قبل البدء في الدرس التالي، تأكد من فهمك للمفاهيم الواردة في هذا الدرس من خلال الإجابة على الأسئلة الواردة في المستند أدناه في دفترك الهندسي.
تحقق من فهمك للأسئلة > (Google Doc / .docx / .pdf)
اختر التالي > للانتقال إلى الدرس 2.