
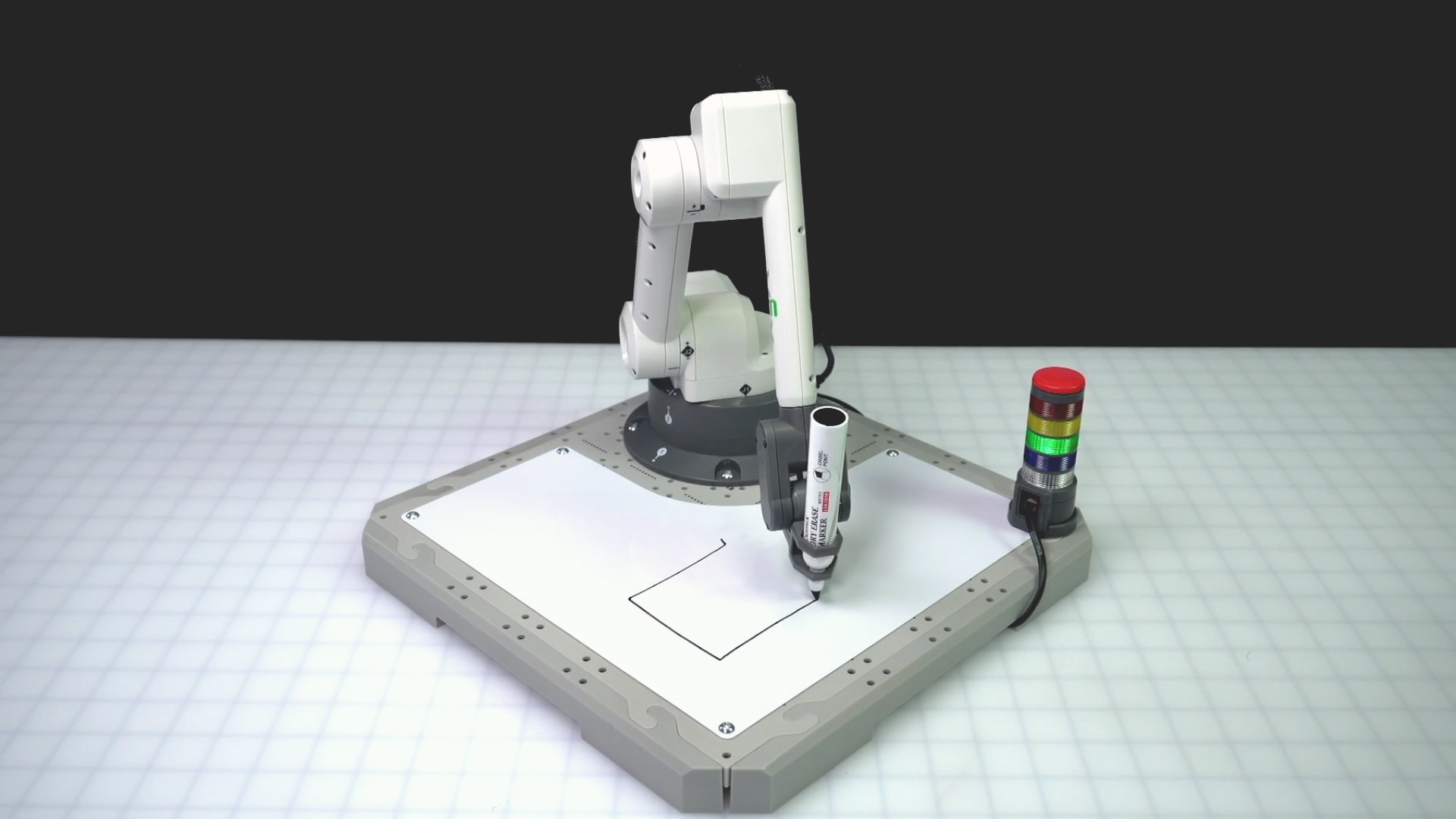
ก่อนหน้านี้คุณย้ายแขน 6 แกนไปยังพิกัดเฉพาะเพื่อวาดรูปทรงต่างๆ ในบทเรียนนี้ท่านจะได้เรียนรู้อีกวิธีหนึ่งในการเคลื่อนแขน 6 แกนเพื่อวาดสี่เหลี่ยมจัตุรัส คุณจะได้รับการแนะนำให้รู้จักกับแนวคิดของการเคลื่อนไหวแบบสัมบูรณ์และแบบสัมพัทธ์เพื่อให้คุณสามารถรวมการเคลื่อนไหวทั้งสองแบบเข้าด้วยกันเพื่อเขียนรหัสแขน 6 แกน
ในบทเรียนนี้ท่านจะได้เรียนรู้:
- ความแตกต่างระหว่างการเคลื่อนที่สัมบูรณ์และสัมพัทธ์
- เมื่อใดที่จะใช้การเคลื่อนที่แบบสัมบูรณ์หรือแบบสัมพัทธ์ในโครงการเพื่อเคลื่อนย้ายแขน 6 แกนตามที่ตั้งใจไว้
- วิธีใช้ บล็อกตำแหน่ง การเพิ่มขึ้นในโครงการเพื่อเขียนรหัสการเคลื่อนไหวสัมพัทธ์
ในตอนท้ายของบทเรียนนี้คุณจะเขียนรหัสแขน 6 แกนเพื่อวาดสี่เหลี่ยมจัตุรัสโดยใช้การเคลื่อนไหวแบบสัมบูรณ์และแบบสัมพัทธ์
วาดสี่เหลี่ยมจัตุรัสด้วยการเคลื่อนที่สัมบูรณ์
ในยูนิตก่อนหน้านี้คุณวาดสี่เหลี่ยมจัตุรัสโดยหาพิกัดของแต่ละจุดและย้ายแขน 6 แกนไปยังตำแหน่งเฉพาะเหล่านั้น เรามาทบทวนกระบวนการนี้เพื่อให้เราสามารถให้ความสนใจกับชนิดของการเคลื่อนไหวของแขน 6 แกนที่ใช้อยู่
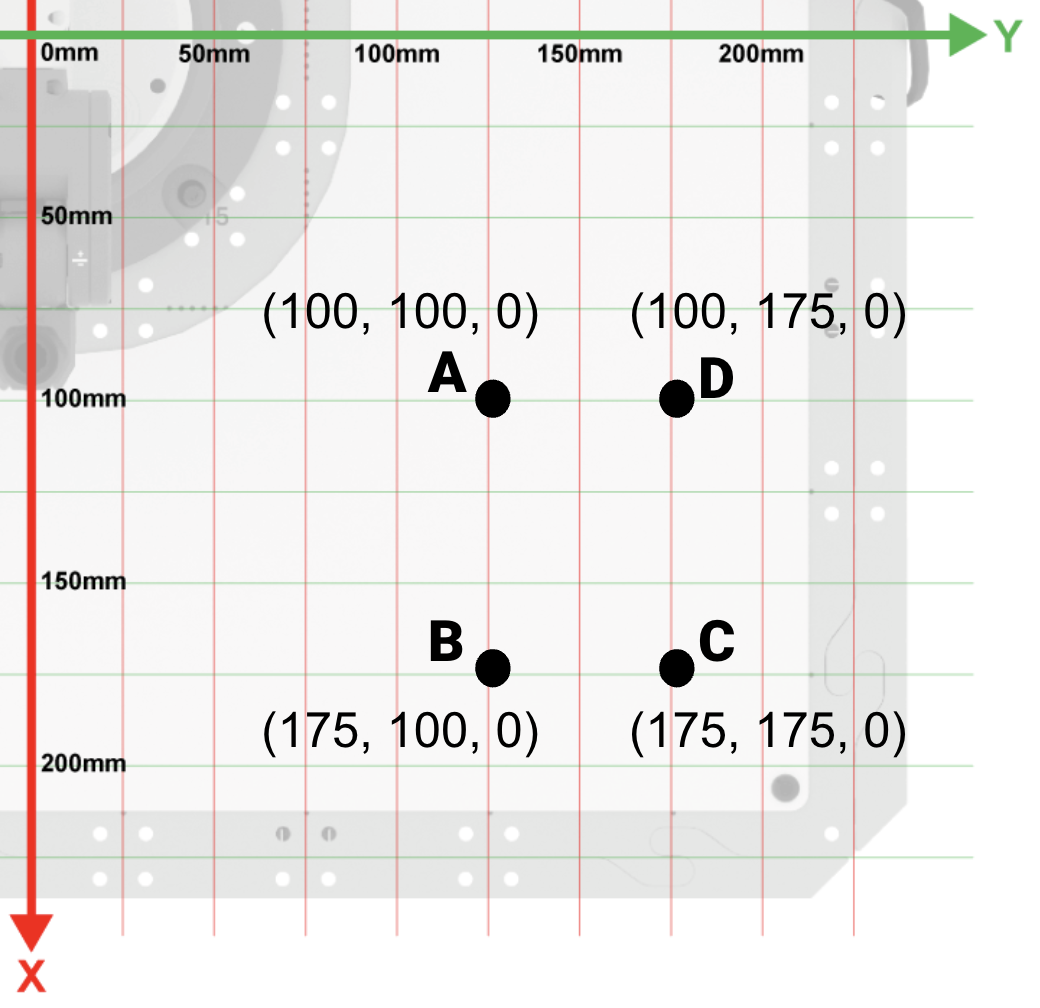
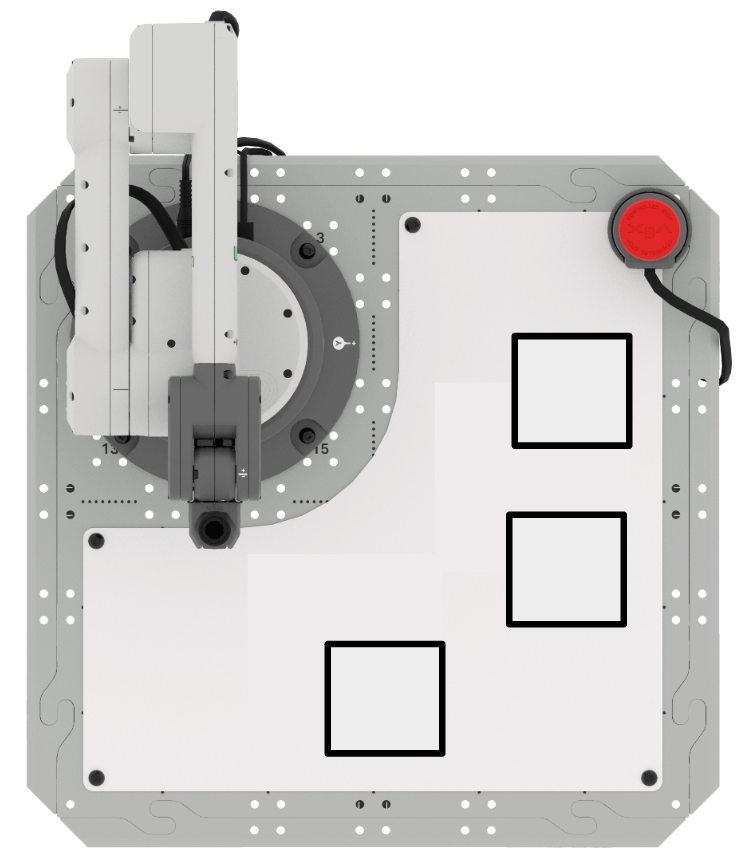
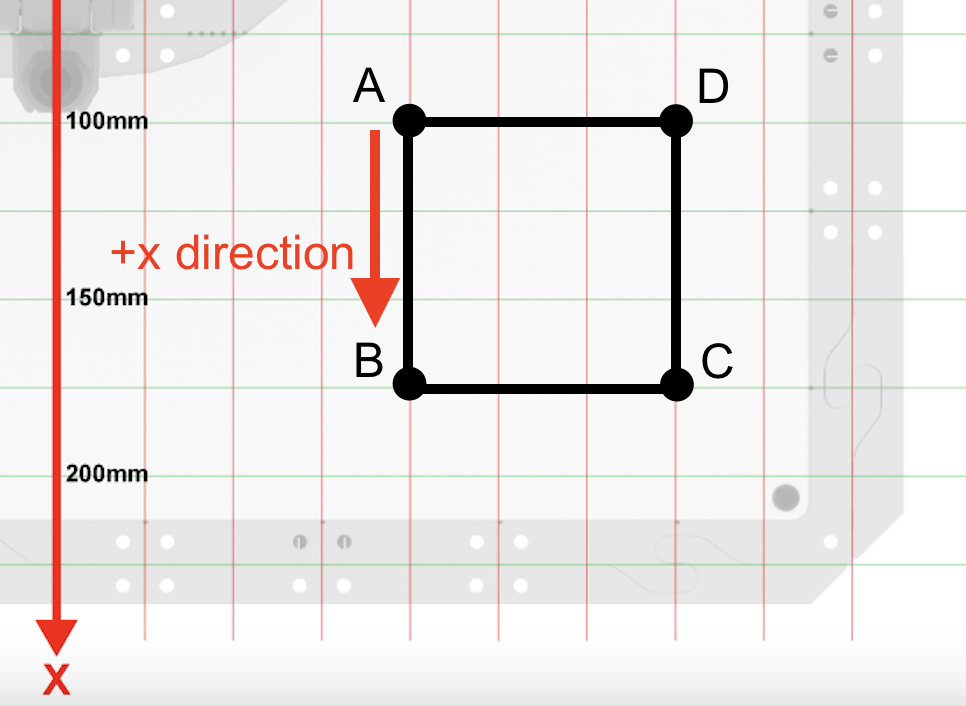
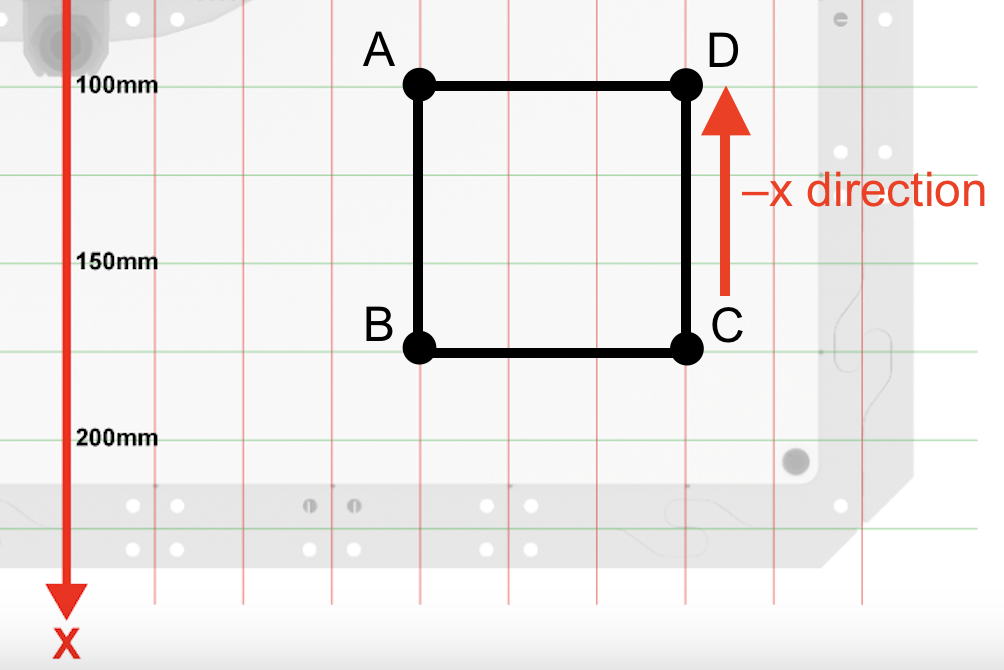
บันทึกพิกัดของ SQUARE ABCD
ในสมุดบันทึกวิศวกรรมของคุณให้บันทึกข้อมูลที่ทราบเกี่ยวกับสี่เหลี่ยมจัตุรัส
- ความยาวแต่ละด้านคือ 75 มม.
- จุด A คือ (100, 100, 0)
- จุด B คือ (175, 100, 0)
- จุด C คือ (175, 175, 0)
- จุด D คือ (100, 175, 0)
เปิดโปรเจกต์บล็อก ใหม่ โดยทำตามขั้นตอนในวิดีโอนี้
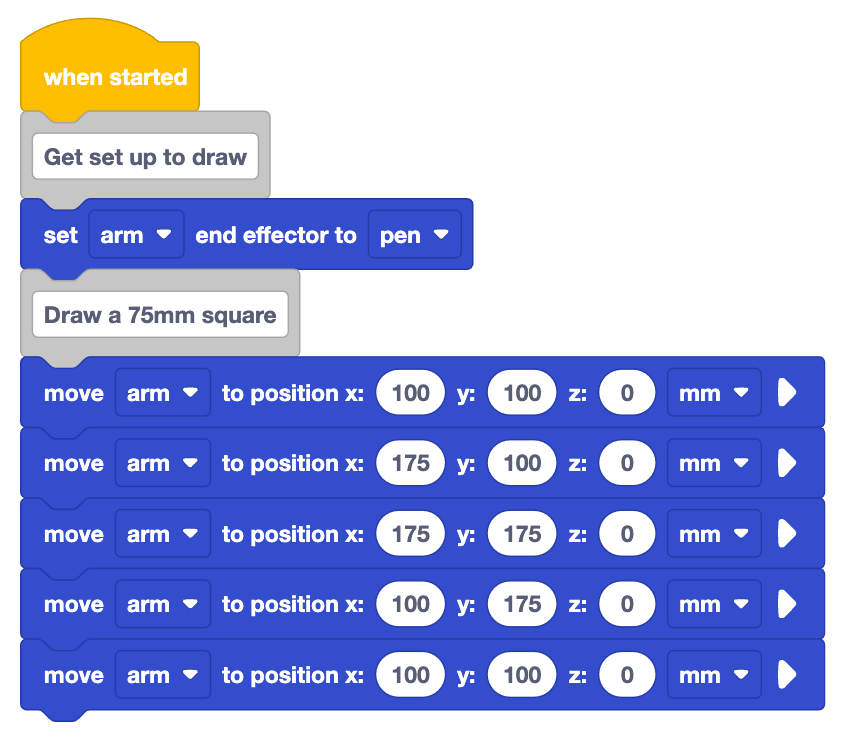
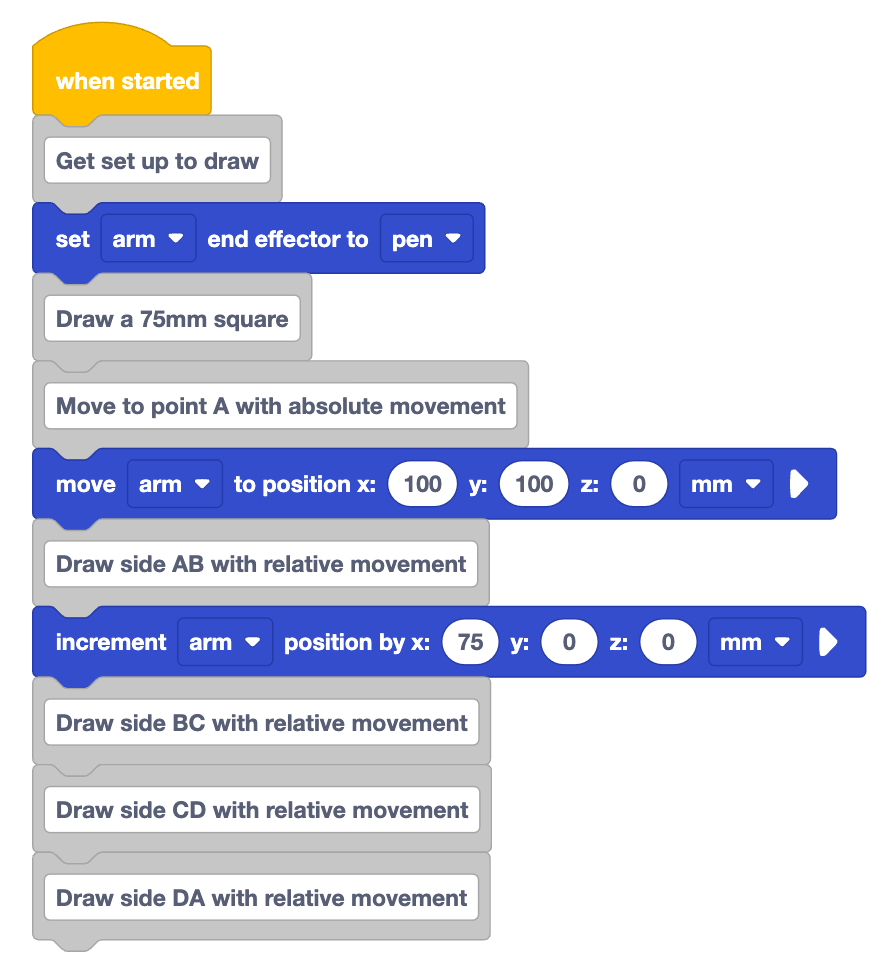
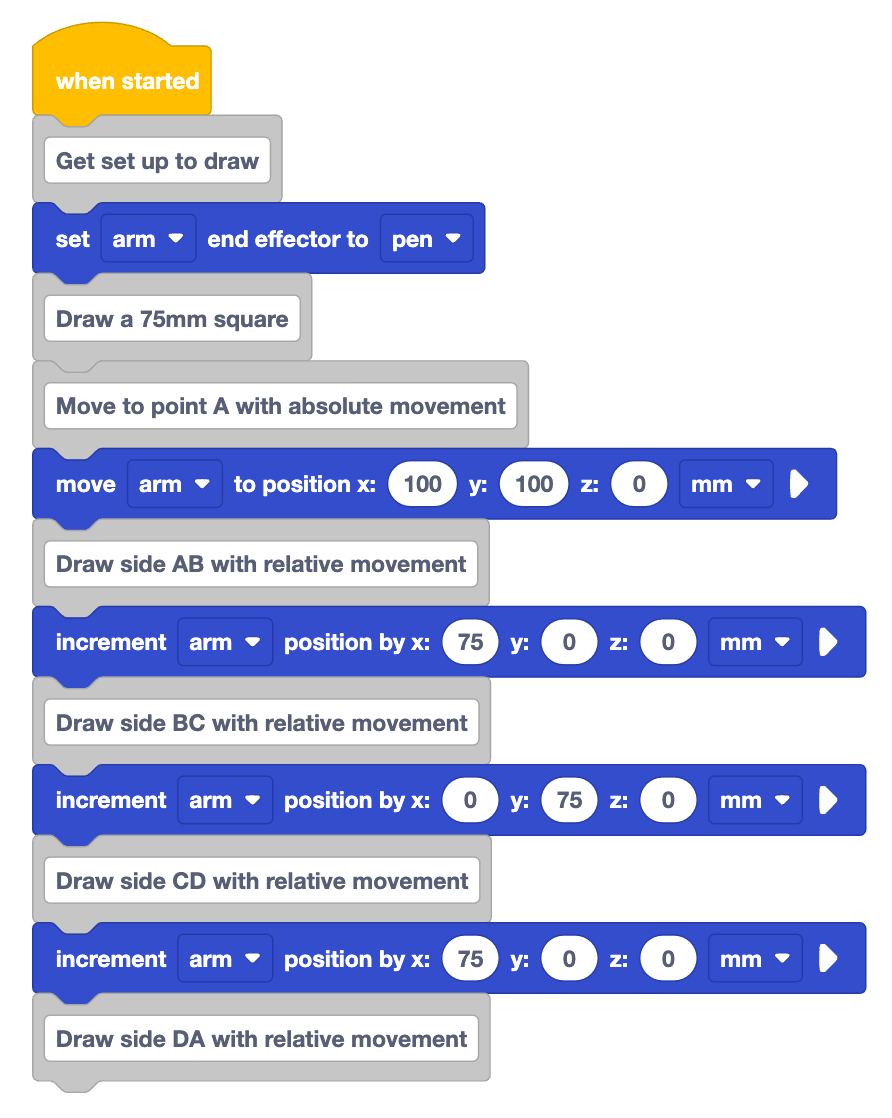
สร้างโปรเจกต์ใหม่ที่แสดงที่นี่ใน VEXcode

ดูบล็อกในโปรเจกต์ คุณคิดว่าแขน 6 แกนจะทำอะไรเมื่อโครงการนี้ดำเนินการ?
บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ อธิบายว่าแขน 6 แกนจะเคลื่อนไหวเป็นคำพูดอย่างไรและร่างสิ่งที่คุณคิดว่าจะวาดบนไวท์บอร์ด
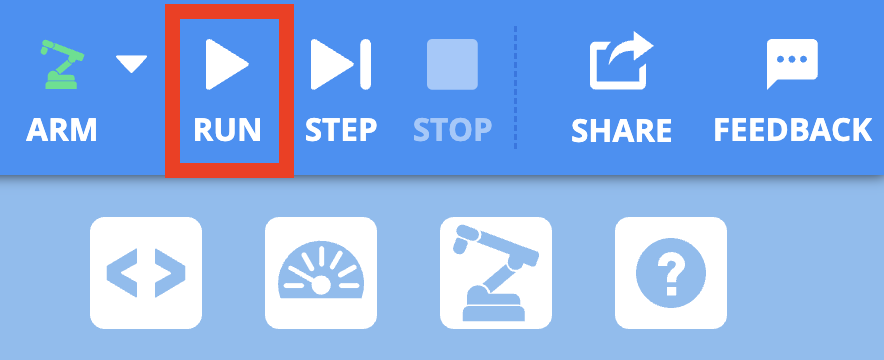
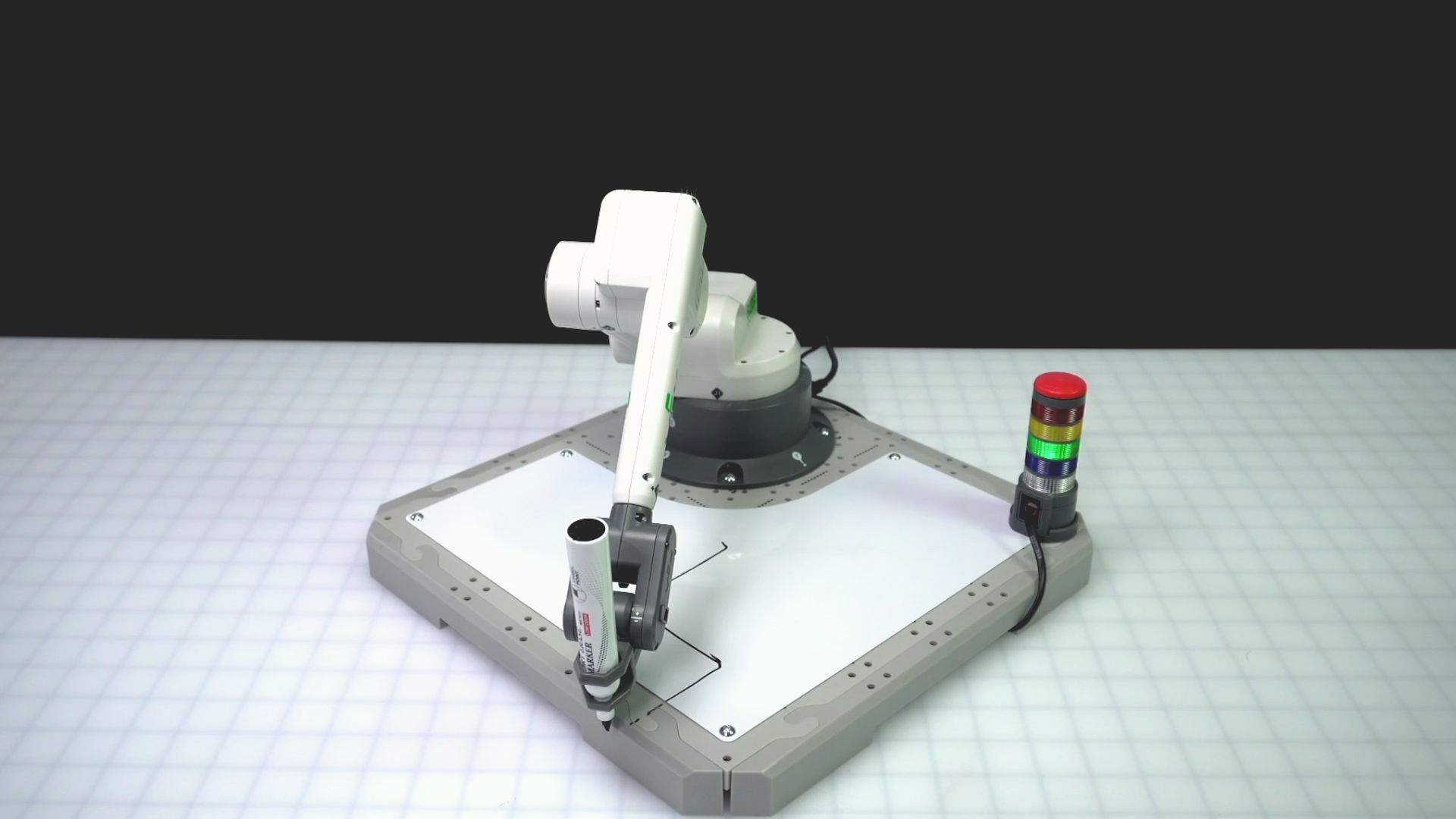
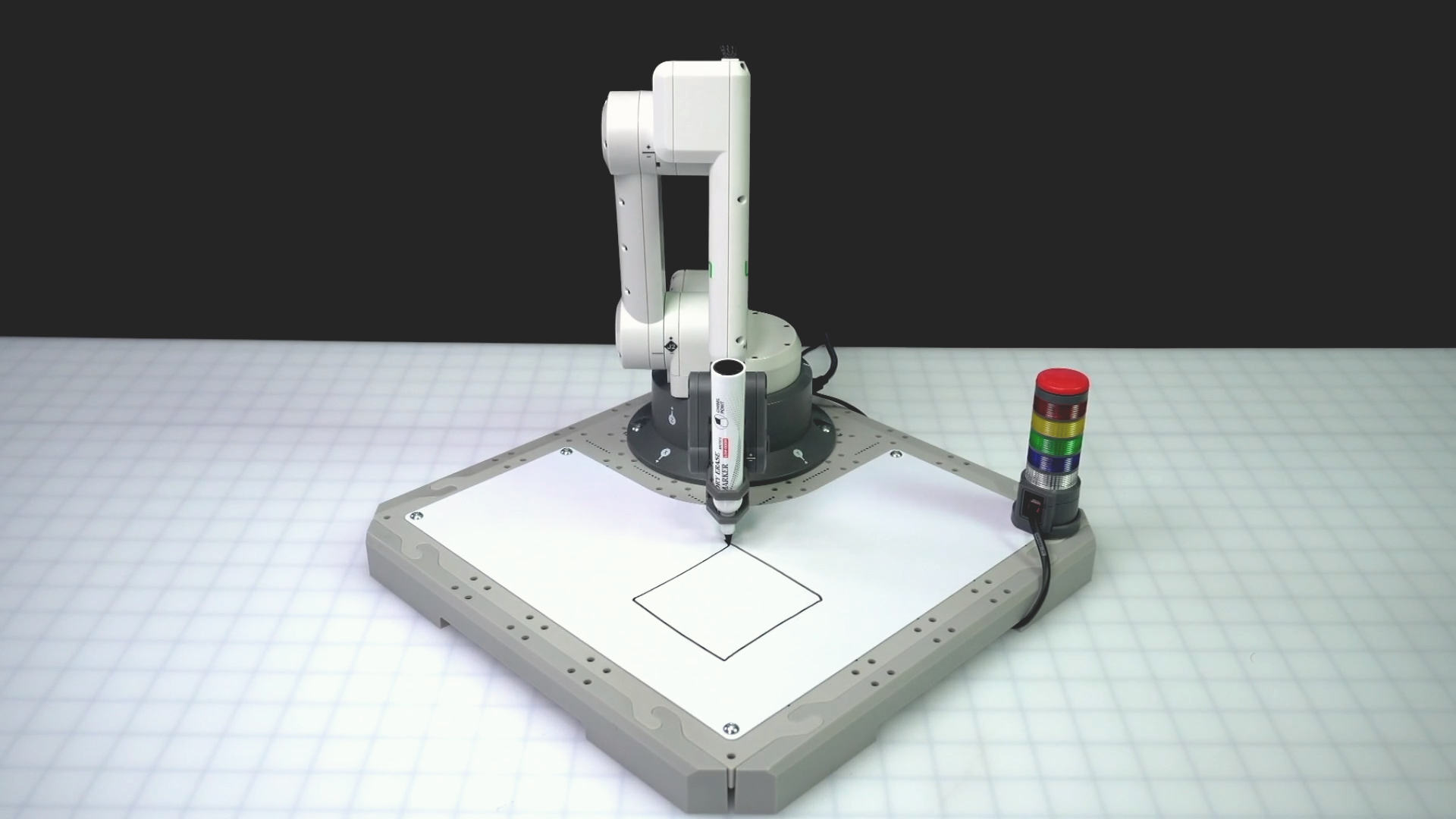
ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว ดำเนินโครงการและสังเกตพฤติกรรมของแขน 6 แกน
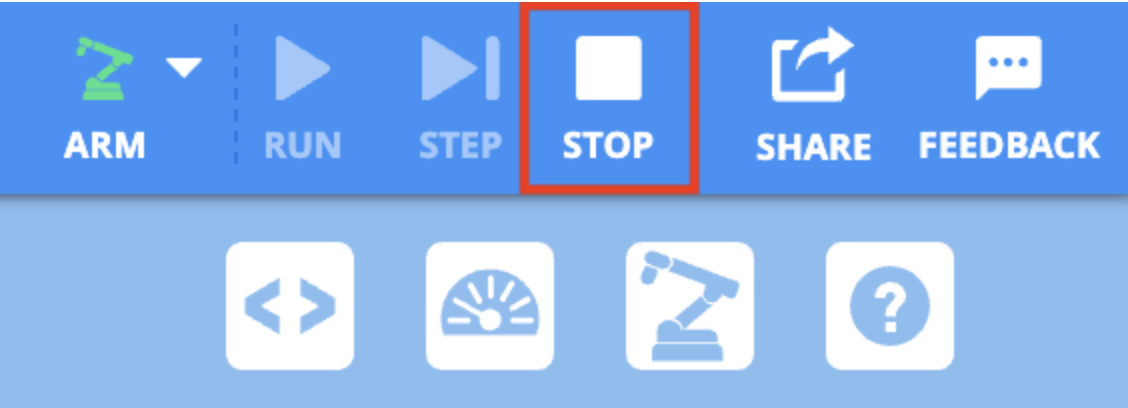
หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จแล้ว
แขน 6 แกนวาดสิ่งที่คุณคาดการณ์ไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
ในโครงการนี้แขน 6 แกนใช้การเคลื่อนที่ สัมบูรณ์ เพื่อวาดสี่เหลี่ยมจัตุรัส นั่นหมายความว่าแขน 6 แกนเคลื่อนที่ไปยังพิกัดเฉพาะเพื่อวาดแต่ละด้านของสี่เหลี่ยมจัตุรัส มันจะไปถึงพิกัดเดียวกันเหล่านั้นไม่ว่าแขน 6 แกนจะอยู่ในตำแหน่งใดมาก่อน สิ่งนี้อาจมีประโยชน์ในบางครั้งแต่เราต้องมีพิกัดที่แน่นอนสำหรับทุกจุดในรูปร่างที่เราทำ มีอีกวิธีหนึ่งในการใช้ข้อมูลเกี่ยวกับความยาวด้านข้างในโครงการเพื่อวาดสี่เหลี่ยมจัตุรัส
วาดสี่เหลี่ยมจัตุรัสด้วยการเคลื่อนที่สัมพัทธ์
การทำความเข้าใจความยาวของด้านสี่เหลี่ยมจัตุรัสช่วยให้เราทราบว่าแขน 6 แกนจำเป็นต้องเคลื่อนที่ เมื่อเทียบกับตำแหน่งปัจจุบัน เพื่อวาดแต่ละด้านอย่างถูกต้องมากน้อยเพียงใด แทนที่จะปักทั้งสี่มุมของสี่เหลี่ยมจัตุรัสเราสามารถเลื่อนแขน ให้ สัมพันธ์กับจุดเริ่มต้นเพื่อให้รูปร่างสมบูรณ์
การเคลื่อนที่สัมพัทธ์คืออะไร?
การ เคลื่อนที่สัมพัทธ์ย้ายแขน 6 แกนไปยังตำแหน่งใหม่ตามตำแหน่งปัจจุบัน มีจุดเริ่มต้นและความยาวของด้านข้างของสี่เหลี่ยมจัตุรัสเราสามารถเคลื่อนแขน 6 แกนไปตามแกน x และ y ที่ สัมพันธ์ กับตำแหน่งเริ่มต้น มาดูรายละเอียดกันด้วยสี่เหลี่ยมจัตุรัสขนาด 75 มม. ของเรา
เราจะเริ่มต้นด้วยการเคลื่อนที่แบบสัมบูรณ์เพื่อไปยังพิกัดเริ่มต้น จากตรงนั้น,
แต่ละด้านสามารถถูกวาดด้วยการเคลื่อนที่สัมพัทธ์ 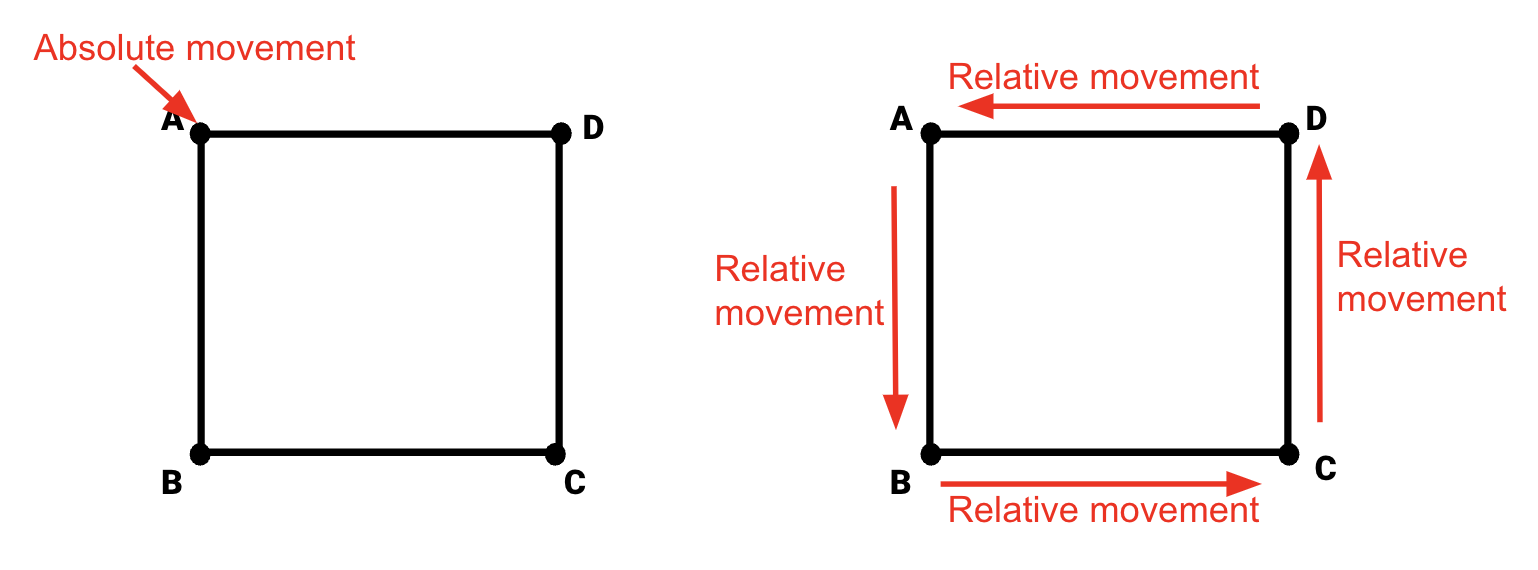
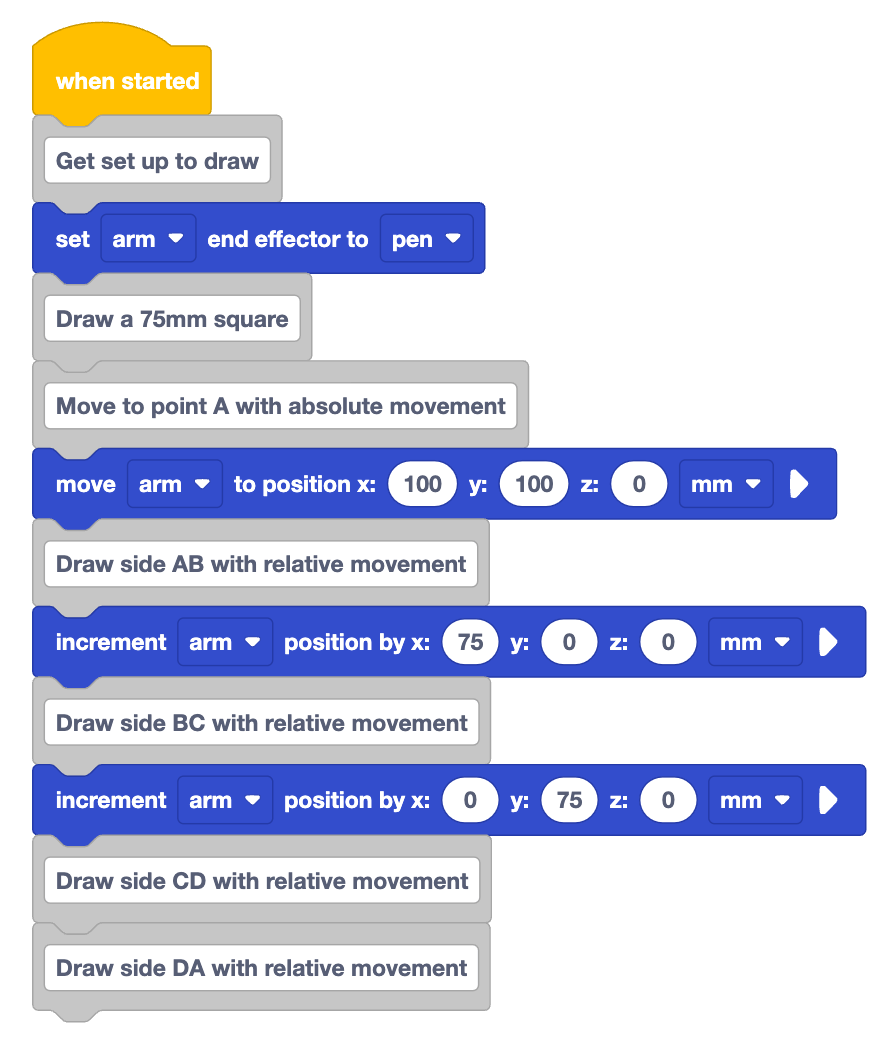
มาแก้ไขโปรเจกต์ของเราเพื่อดูการดำเนินการกัน
ถอด บล็อก ย้ายไปยังตำแหน่งที่ใช้ในการวาดสี่เหลี่ยม
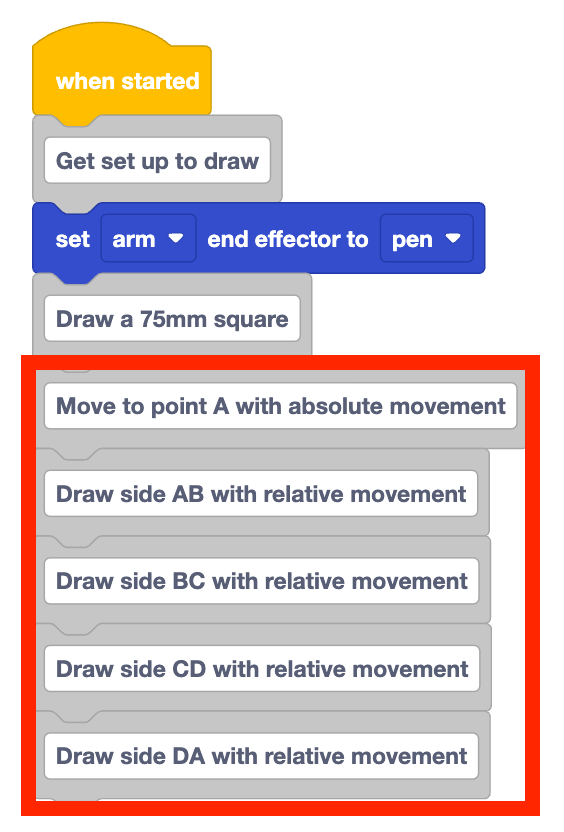
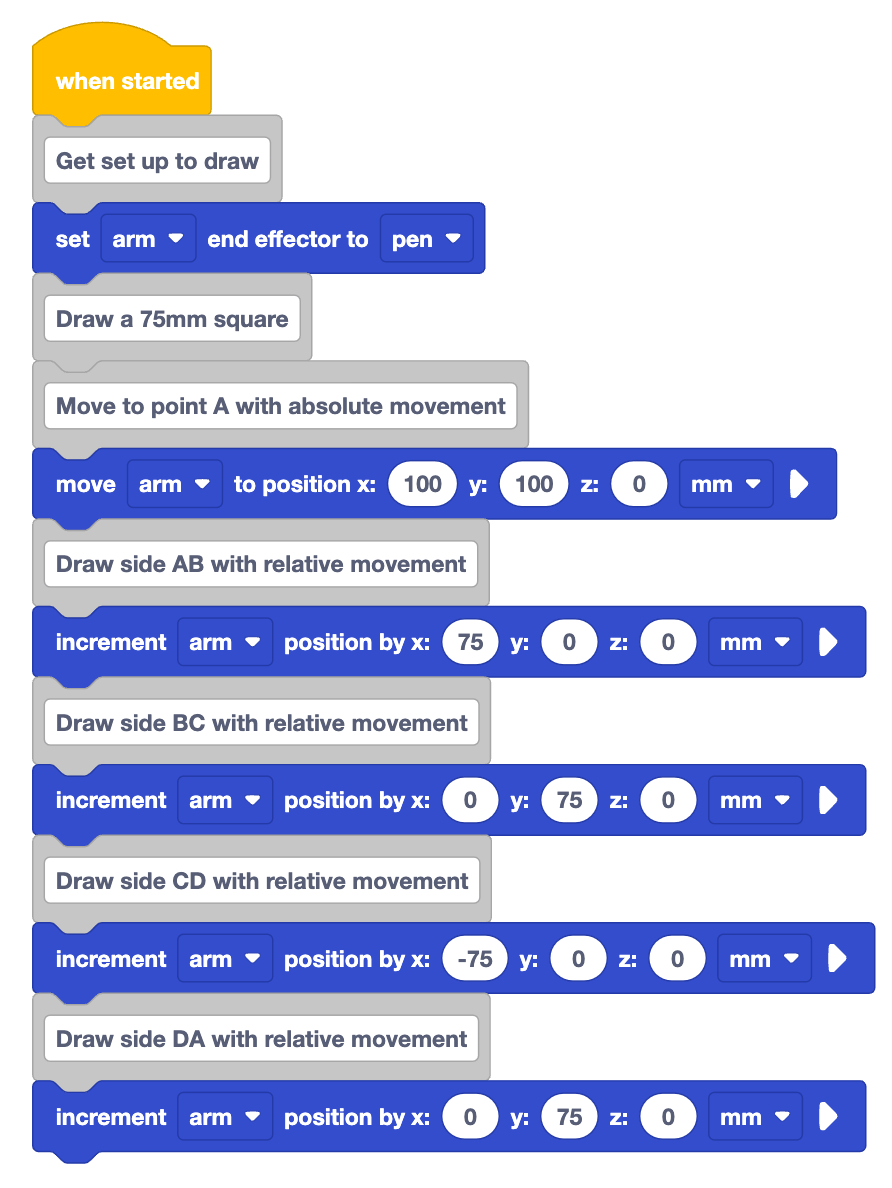
เพิ่ม บล็อก ความคิดเห็นห้าบล็อกในโครงการเพื่ออธิบายการเคลื่อนไหวของแขน 6 แกนเพื่อวาดแต่ละด้านของสี่เหลี่ยมจัตุรัส พิมพ์ความคิดเห็นต่อไปนี้ลงในโครงการ:
- ย้ายไปยังจุด A ด้วยการเคลื่อนที่สัมบูรณ์
- ด้านวาด AB ที่มีการเคลื่อนที่สัมพัทธ์
- วาดด้าน BC ด้วยการเคลื่อนที่สัมพัทธ์
- ซีดีด้านวาดที่มีการเคลื่อนที่สัมพัทธ์
- DA ด้านการวาดที่มีการเคลื่อนไหวสัมพัทธ์
การเพิ่มความคิดเห็นเช่นนี้จะเป็นประโยชน์ในการจัดระเบียบและแสดงขั้นตอนที่จำเป็นตามลำดับเพื่อทำงานให้เสร็จ
วาดด้าน AB ด้วยการเคลื่อนที่สัมพัทธ์

เพิ่มการ ย้ายไปยัง บล็อกตำแหน่งใต้ความคิดเห็น "ย้ายไปยังจุด A ด้วยการเคลื่อนไหวแบบสัมบูรณ์" ป้อนพิกัดเริ่มต้น (จุด A) ในพารามิเตอร์
- จุด A (100, 100, 0)
โครงการนี้เริ่มต้นเช่นเดียวกับโครงการก่อนหน้าเนื่องจากเริ่มต้นด้วยการเคลื่อนไหวที่แน่นอน
ในการวาดด้าน AB ด้วยการเคลื่อนที่สัมพัทธ์เราจะใช้ บล็อกตำแหน่งที่
เพิ่มขึ้น 
บล็อกตำแหน่งที่ เพิ่มขึ้นเคลื่อนแขน 6 แกนสำหรับระยะทางเฉพาะตามแกน x, y, z นี่คือบล็อกที่เราจะใช้ในการเคลื่อนแขน 6 แกนด้วยการเคลื่อนที่แบบสัมพัทธ์ บล็อกตำแหน่งที่ เพิ่มขึ้นเคลื่อนที่แขน 6 แกนเป็นระยะทางที่สัมพันธ์กับตำแหน่งปัจจุบันของมัน
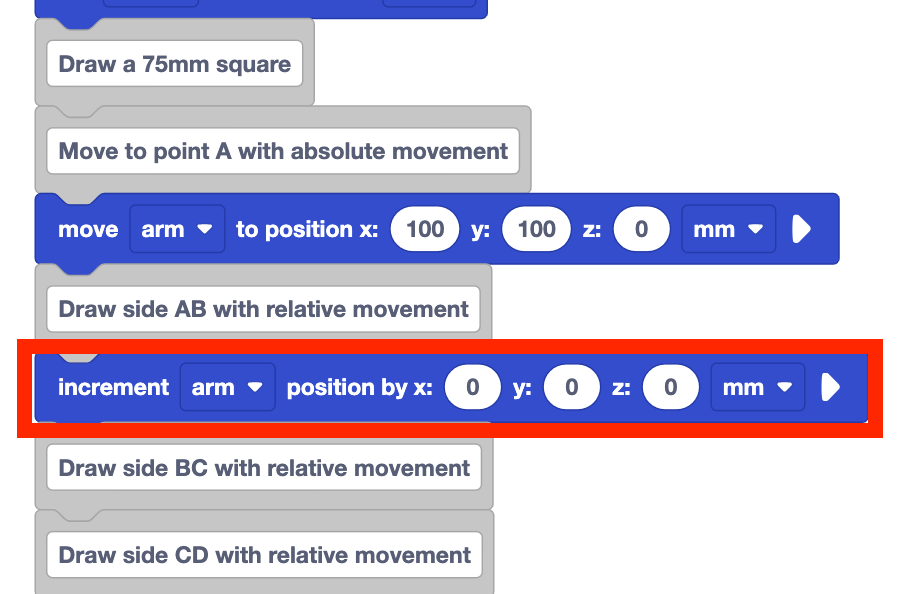
เพิ่ม บล็อกตำแหน่งที่เพิ่ม ขึ้นใต้ความคิดเห็น "วาดด้าน AB ด้วยการเคลื่อนไหวสัมพัทธ์"
โปรดสังเกตว่า บล็อกตำแหน่งการ เพิ่มขึ้นมีพารามิเตอร์สำหรับแกน x, y และ z ซึ่งสัมพันธ์กับ ระยะ ที่แขน 6 แกนจะเคลื่อนที่ไปตามแต่ละแกนหรือการเคลื่อนที่สัมพัทธ์ของแขน 6 แกนบนแต่ละแกน พารามิเตอร์เหล่านี้ ไม่ ใช่ค่าพิกัดเช่นเดียวกับที่อยู่ใน บล็อกการ ย้ายไปยังตำแหน่งเมื่อแขน 6 แกนใช้การเคลื่อนที่สัมบูรณ์
ในการกำหนดพารามิเตอร์ที่จำเป็นในการวาดด้านข้างของสี่เหลี่ยมจัตุรัสจำเป็นต้องใช้ข้อมูล สองชิ้น:
- ระยะทางในการเคลื่อนแขน 6 แกนที่สัมพันธ์กับตำแหน่งปัจจุบัน
- แกนหรือแกนแขน 6 แกน จะ เคลื่อนที่ไปตาม
ในการวาดด้าน AB ของสี่เหลี่ยมจัตุรัสระยะห่างที่แขน 6 แกนจะเคลื่อนที่สัมพันธ์กับตำแหน่งปัจจุบันคือความยาวด้านข้างหรือ 75 มม. ในการเคลื่อนที่จากจุด A ไปยังจุด B แขน 6 แกนจะเคลื่อนที่ไปตามแกน x ในทิศทางบวก มันจะไม่เคลื่อนที่ไปตามแกน y หรือ z
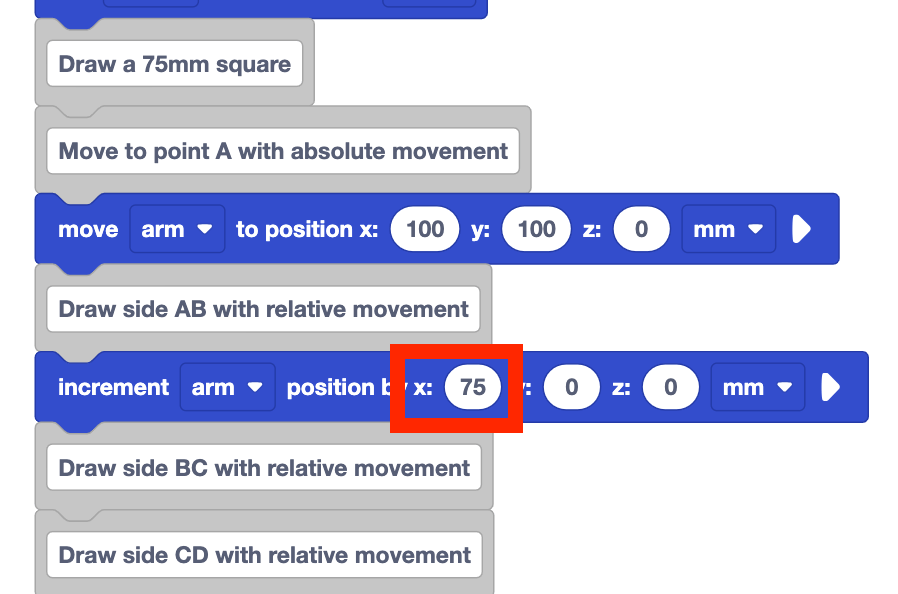
ตั้งค่าพารามิเตอร์ x เป็น 75 ใน บล็อกตำแหน่ง การเพิ่มขึ้น พารามิเตอร์ y และ z ยังคงเป็น 0
สิ่งนี้จะย้ายแขน 6 แกนเป็นระยะ 75 มม. ไปตามแกน x เท่านั้นในทิศทางบวก
ดูโครงการที่เป็นอยู่ตอนนี้สิ คุณคิดว่าสิ่งนี้จะทำให้แขน 6 แกนทำอะไรเมื่อทำงาน?
บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ วาดสิ่งที่คุณคิดว่าแขน 6 แกนจะวาด

ตรวจสอบให้แน่ใจว่าแขน 6 แกนเชื่อมต่อกับ VEXcode แล้ว ดำเนินโครงการและสังเกตพฤติกรรมของแขน 6 แกน
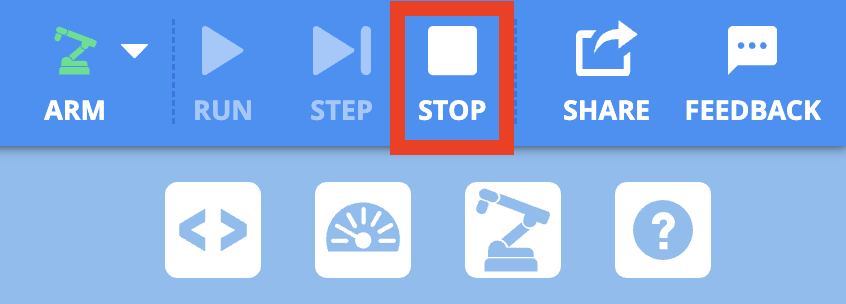
หยุดโครงการเมื่อแขน 6 แกนหยุดเคลื่อนที่
แขน 6 แกนเคลื่อนไหวตามที่คุณคาดการณ์ไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
วาดด้าน BC ด้วยการเคลื่อนที่สัมพัทธ์
เราสามารถใช้สิ่งที่เราเรียนรู้เพื่อวาดด้านที่หนึ่งของสี่เหลี่ยมจัตุรัสเพื่อวาดด้าน BC
เพิ่ม บล็อกตำแหน่งที่เพิ่ม ขึ้นด้านล่างความคิดเห็น "วาดด้าน BC ด้วยการเคลื่อนไหวสัมพัทธ์"
กำหนดพารามิเตอร์ของ บล็อกตำแหน่ง การเพิ่มขึ้น
ในการวาดด้าน BC แขน 6 แกนจะต้องเคลื่อนที่เป็นระยะ 75 มม. เมื่อดูทิศทางการเคลื่อนที่ที่สัมพันธ์กับตำแหน่งปัจจุบันเราจะเห็นว่าแกนแขน 6 แกนต้องเคลื่อนที่ไปตามแกน y แขน 6 แกนไม่ควรเคลื่อนที่ไปตามแกน x หรือ z
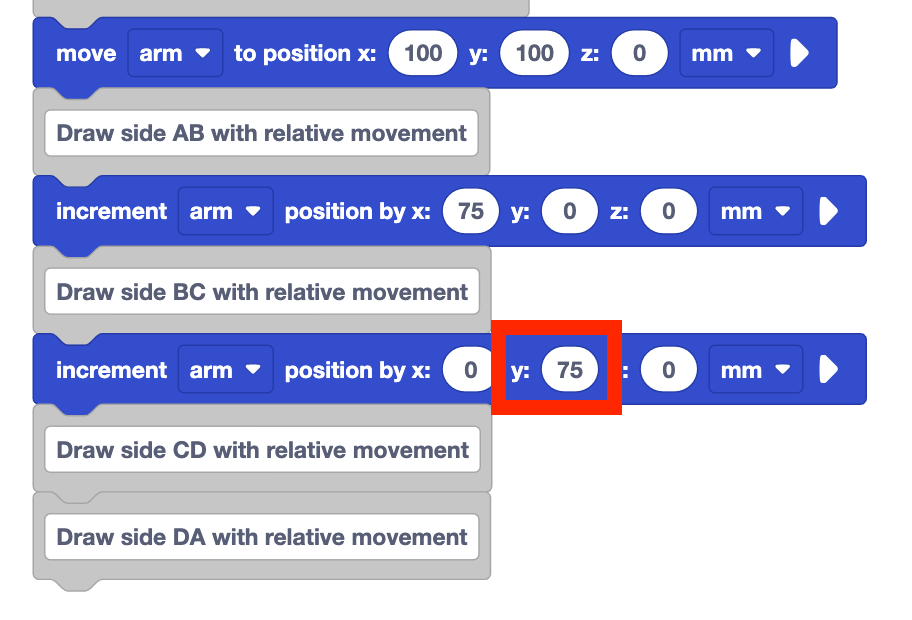
ตั้งค่าพารามิเตอร์ y ของ บล็อกตำแหน่งที่ เพิ่มขึ้นเป็น 75
การดำเนินการนี้จะย้ายแขน 6 แกนเป็นระยะ 75 มม. ไปตามแกน y เนื่องจากพารามิเตอร์สำหรับแกน x และ z เป็น 0 แขน 6 แกนจะไม่เคลื่อนที่บนแกน x หรือ z
คาดการณ์ว่าคุณคิดว่าแขน 6 แกนจะเคลื่อนที่อย่างไรเมื่อโครงการทำงาน บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ
ร่างสิ่งที่คุณคิดว่าแขน 6 แกนจะวาด
ดำเนินโครงการและสังเกตพฤติกรรมของแขน 6 แกน
หยุดโครงการเมื่อแขน 6 แกนเคลื่อนที่เสร็จแล้ว
แขน 6 แกนวาดสิ่งที่คุณคาดการณ์ไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
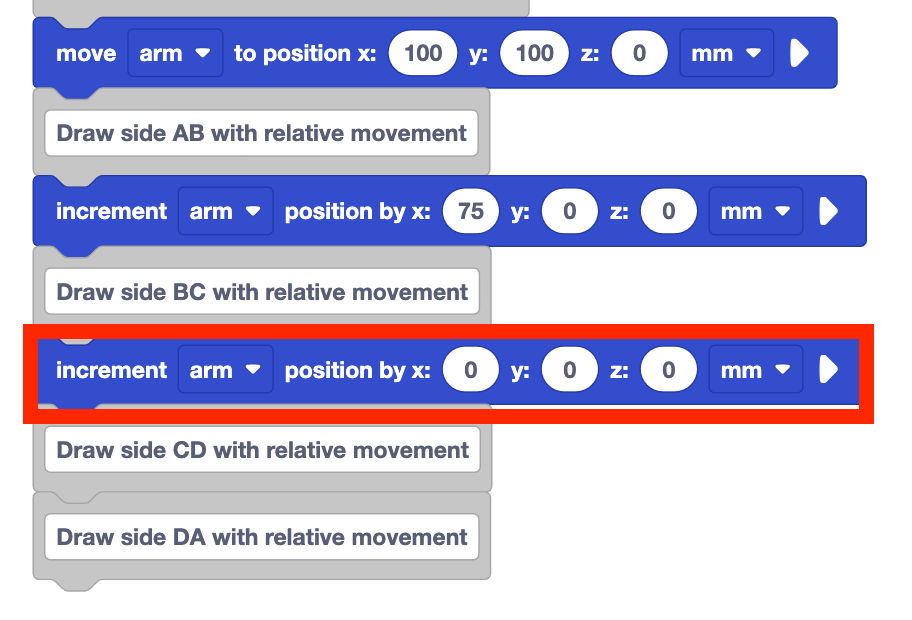
การวาดแผ่นซีดีด้านข้างด้วยการเคลื่อนที่สัมพัทธ์
ตอนนี้เราได้วาดสองด้านแรกของสี่เหลี่ยมจัตุรัสแล้วเราสามารถสร้างโครงการของเราต่อไปเพื่อวาดซีดีด้านข้าง
เพิ่ม บล็อกตำแหน่งที่ เพิ่มขึ้นด้านล่างความคิดเห็น "วาดซีดีด้านข้างด้วยการเคลื่อนไหวสัมพัทธ์"
กำหนดพารามิเตอร์สำหรับ บล็อกตำแหน่ง การเพิ่มขึ้น
ในการวาดซีดีด้านข้างความยาวด้านข้างยังคงเป็น 75 มม. เมื่อดูทิศทางของการเคลื่อนที่นั้นที่สัมพันธ์กับตำแหน่งปัจจุบันของแขน 6 แกนเราจะเห็นว่าการเคลื่อนที่นั้นอยู่ตามแกน x อีกครั้ง
แขน 6 แกนไม่ควรเคลื่อนที่บนแกน y หรือ z ที่ด้านนี้ของสี่เหลี่ยมจัตุรัส

ตั้งค่าพารามิเตอร์ x ของ บล็อกตำแหน่งที่ เพิ่มขึ้นเป็น 75
คาดการณ์ว่าคุณคิดว่าแขน 6 แกนจะเคลื่อนที่อย่างไรเมื่อดำเนินโครงการ บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณและให้แน่ใจว่าได้รวมภาพร่างของสิ่งที่คุณคิดว่าจะวาด

ดำเนินโครงการและสังเกตพฤติกรรมของแขน 6 แกน
มันวาดสิ่งที่คุณคาดการณ์ไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
แขน 6 แกน ไม่ได้ วาดแผ่นซีดีด้านข้างตามที่ตั้งใจไว้
เรามาดูกันว่าทำไมมันถึงเกิดขึ้น ความยาวด้านข้างไม่เปลี่ยนแปลงดังนั้นความยาวของเส้นที่วาดจึงถูกต้อง อย่างไรก็ตาม ทิศทางของ การเคลื่อนไหวนั้นไม่ใช่
เราสามารถพิจารณาการเคลื่อนที่ในทิศทางบวกหรือลบโดยการป้อนพารามิเตอร์ใน บล็อกตำแหน่งที่ เพิ่มขึ้นเป็นจำนวนบวกหรือลบ
สำหรับด้าน AB และ BC แขน 6 แกนเคลื่อนที่ไปในทิศทางบวกตามแกน x และ y ดังนั้นเราจึงใช้จำนวนบวก
แต่ในการวาดซีดีด้านข้างแขน 6
แกนต้องเคลื่อนที่ไปใน ทิศทาง ลบดังนั้นเราจะต้องใช้ค่าลบในพารามิเตอร์
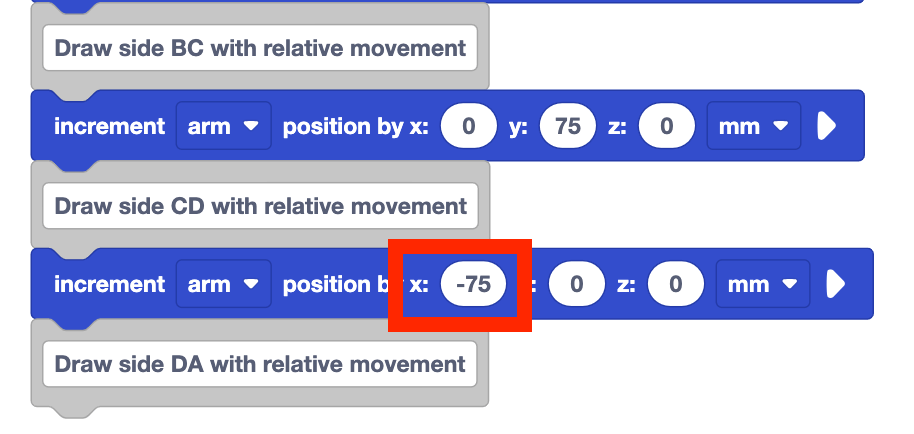
ตั้งค่าพารามิเตอร์ x ของ บล็อกตำแหน่งที่ เพิ่มขึ้นเป็น –75
สิ่งนี้จะย้ายแขน 6 แกนเป็นระยะ 75 มม. ใน ทิศทาง ลบไปตามแกน x ค่าแกน y และ z ไม่จำเป็นต้องเปลี่ยนแปลงเนื่องจากแกนแขน 6 แกนยังคงไม่เคลื่อนที่ไปตามแกนเหล่านั้นเพื่อวาดซีดีด้านข้าง
ดำเนินโครงการอีกครั้งและสังเกตพฤติกรรมของแขน 6 แกน
ซีดีด้านข้างวาดตามที่ตั้งใจไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
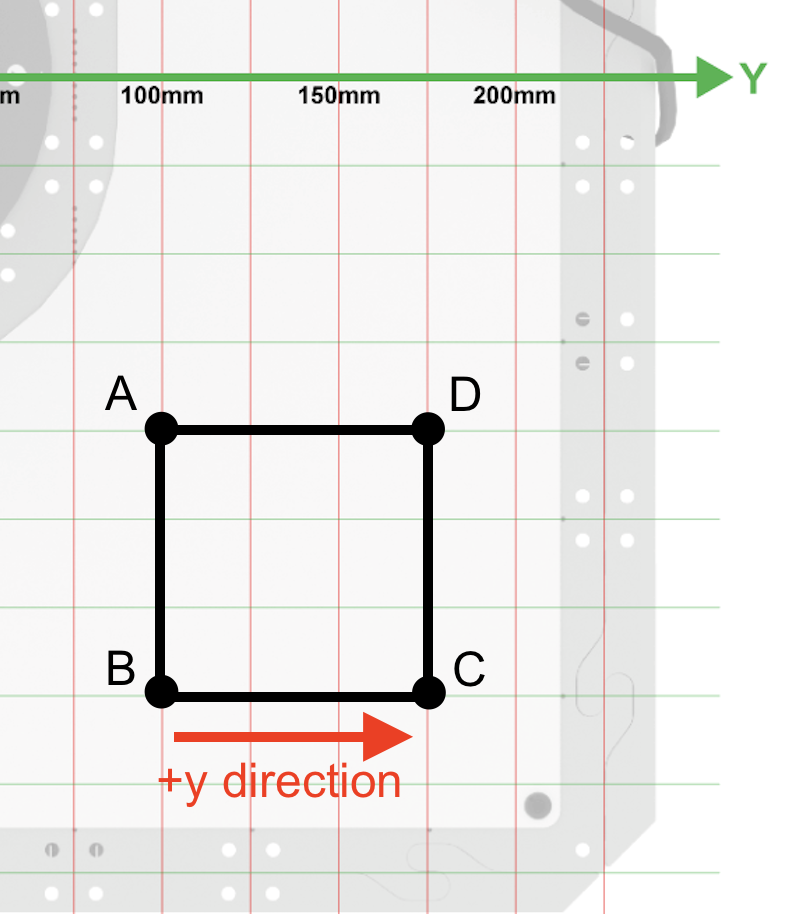
DA ด้านการวาดที่มีการเคลื่อนที่สัมพัทธ์
ตอนนี้เรามีสามด้านของสี่เหลี่ยมจัตุรัสที่วาดแล้วเราสามารถนำสิ่งที่เราได้เรียนรู้ไปใช้ในการวาดด้านสุดท้ายได้
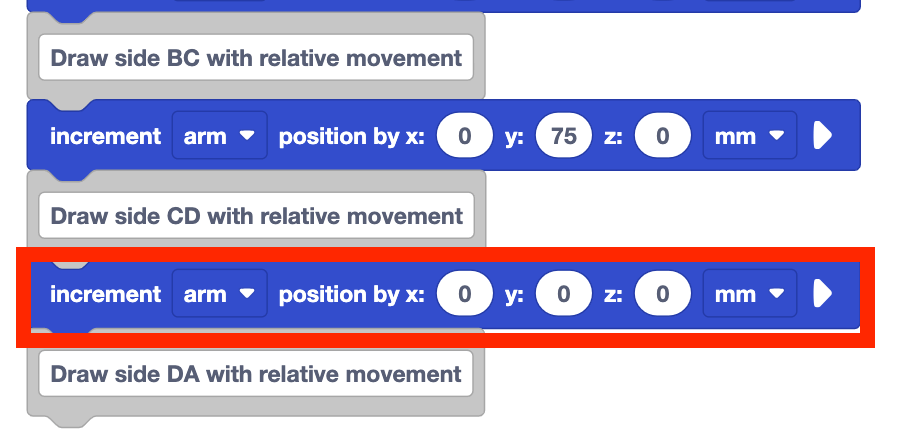
เพิ่ม บล็อกตำแหน่งที่เพิ่ม ขึ้นด้านล่างความคิดเห็น "วาดด้าน DA ด้วยการเคลื่อนไหวสัมพัทธ์"

กำหนดพารามิเตอร์สำหรับ บล็อกตำแหน่ง การเพิ่มขึ้น
ในการวาดด้าน DA แขน 6 แกนจะเคลื่อนที่อีกครั้งเป็นระยะ 75 มม. เมื่อดูทิศทางของการเคลื่อนที่นั้นตามตำแหน่งปัจจุบันแขน 6 แกนจะต้องเคลื่อนที่ไปตามแกน y อีกครั้ง มันไม่จำเป็นต้องเคลื่อนที่ไปตามแกน x หรือ z เพื่อวาดด้าน DA
ตั้งค่าพารามิเตอร์ y ของ บล็อกตำแหน่งที่ เพิ่มขึ้นเป็น 75 พารามิเตอร์ x และ z ควรเป็น 0
คาดการณ์ว่าแขน 6 แกนจะเคลื่อนที่อย่างไรและจะวาดอะไรเมื่อดำเนินโครงการ บันทึกการคาดการณ์ของคุณลงในสมุดบันทึกวิศวกรรมของคุณ

ดำเนินโครงการและสังเกตพฤติกรรมของแขน 6 แกน
มันเคลื่อนไหวตามที่คุณคาดการณ์ไว้หรือไม่? มันวาดด้านสุดท้ายของสี่เหลี่ยมจัตุรัสตามที่ตั้งใจไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
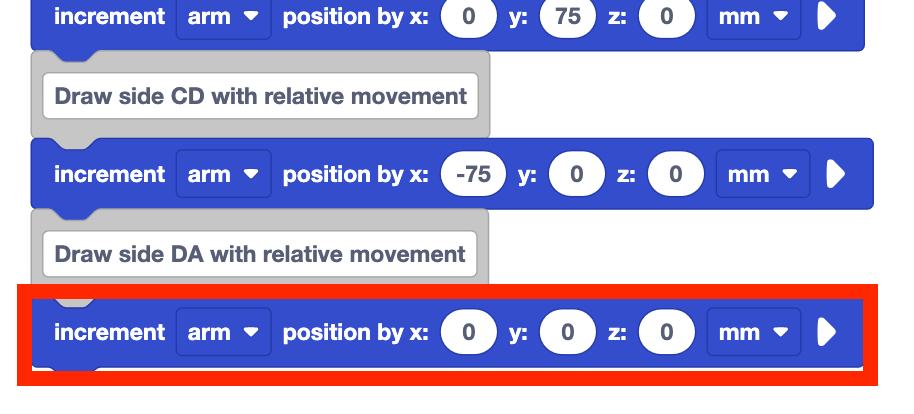
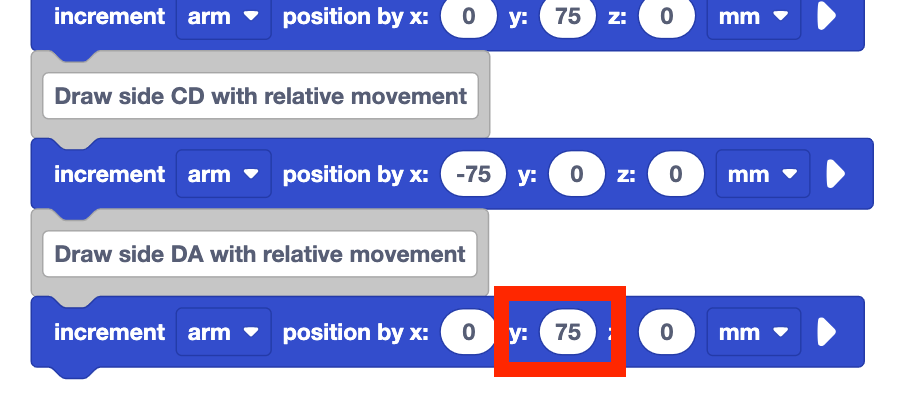
ในการวาดด้าน DA ตามที่ตั้งใจแขน 6 แกนจำเป็นต้องเคลื่อนที่ไปใน ทิศทาง ลบตามแกน y อย่างไรก็ตามเราตั้งค่าพารามิเตอร์ y ไว้ที่ 75 มม. ซึ่งบ่งชี้ว่าแกนแขน 6 แกนควรเคลื่อนที่ไปใน ทิศทาง บวกตามแกน y

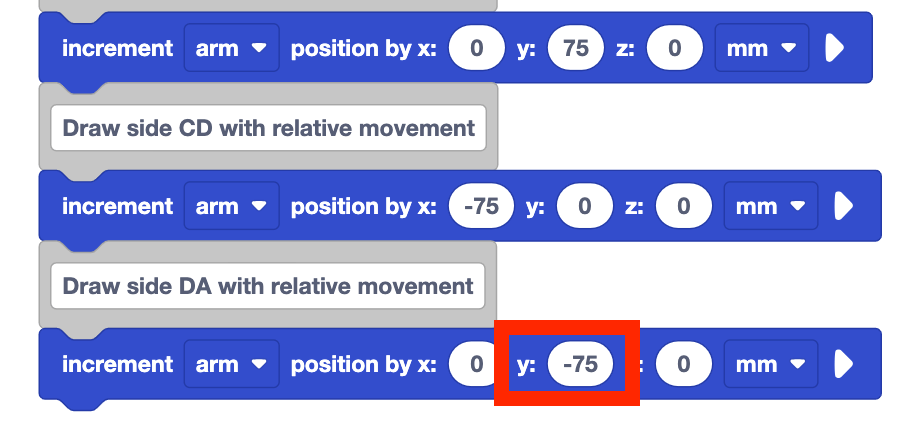
ตั้งค่าพารามิเตอร์ y ของ บล็อกตำแหน่ง การเพิ่มสุดท้ายเป็น –75 พารามิเตอร์ x และ z ควรเป็น 0 เนื่องจากแกนแขน 6 แกนไม่จำเป็นต้องเคลื่อนที่บนแกนเหล่านี้เพื่อวาดด้าน DA ตามที่ตั้งใจไว้
ตอนนี้แขน 6 แกนควรเคลื่อนที่ไปตามแกน y ในทิศทางลบเพื่อให้สี่เหลี่ยมจัตุรัสสมบูรณ์
เรียกใช้โครงการและสังเกตการเคลื่อนไหวของแขน 6 แกน
มันวาดสี่เหลี่ยมจัตุรัสตามที่ตั้งใจไว้หรือเปล่า? เหตุใดจึงรู้สึกเช่นนั้น?

อย่าลืมเปลี่ยนชื่อและบันทึกโปรเจกต์
ทำไมต้องใช้การเคลื่อนไหวแบบสัมพัทธ์?
ในขณะที่การเคลื่อนไหวของแขน 6 แกนนั้นเหมือนกันในการวาดสี่เหลี่ยมจัตุรัสขนาด 75 มม. ที่มีทั้งการเคลื่อนไหวแบบสัมบูรณ์และแบบสัมพัทธ์แต่มีความยืดหยุ่นและความสะดวกเพิ่มเติมเมื่อเราใช้การเคลื่อนไหวแบบสัมพัทธ์ ตัวอย่างเช่นหากคุณต้องการวาดสี่เหลี่ยมจัตุรัสขนาด 75 มม. ในตำแหน่งอื่นคุณจะทำอย่างไร? เมื่อใช้การเคลื่อนที่สัมบูรณ์คุณจะพบพิกัดใหม่ของทั้งสี่จุดและเขียนรหัสแขน 6 แกนเพื่อเชื่อมต่อ อย่างไรก็ตามการใช้การเคลื่อนที่สัมพัทธ์คุณจำเป็นต้องรู้พิกัดเริ่มต้นเท่านั้นและส่วนที่เหลือยังคงเหมือนเดิม
การเคลื่อนที่สัมบูรณ์จะพาคุณไปยังพิกัดเดียวกันเสมอไม่ว่าตำแหน่งเริ่มต้นจะอยู่ที่ใดก็ตาม ซึ่งจะมีประโยชน์เมื่อคุณจำเป็นต้องย้ายแขน 6 แกนไปยังตำแหน่งที่เฉพาะเจาะจงเพื่อเริ่มโครงการหรือเพื่อให้แน่ใจว่าคุณสามารถไปถึงตำแหน่งนั้นได้โดยไม่คำนึงถึงพิกัดก่อนหน้านี้
การเคลื่อนที่สัมพัทธ์จะย้ายไปยังตำแหน่งใหม่ตามตำแหน่งปัจจุบัน สิ่งนี้มีประโยชน์เมื่อคุณต้องการย้ายแขน 6 แกนให้สัมพันธ์กับตำแหน่งที่ทราบเช่นเดียวกับที่คุณทำเมื่อวาดสี่เหลี่ยมจัตุรัสหรือเพื่อย้ายในรูปแบบเฉพาะ
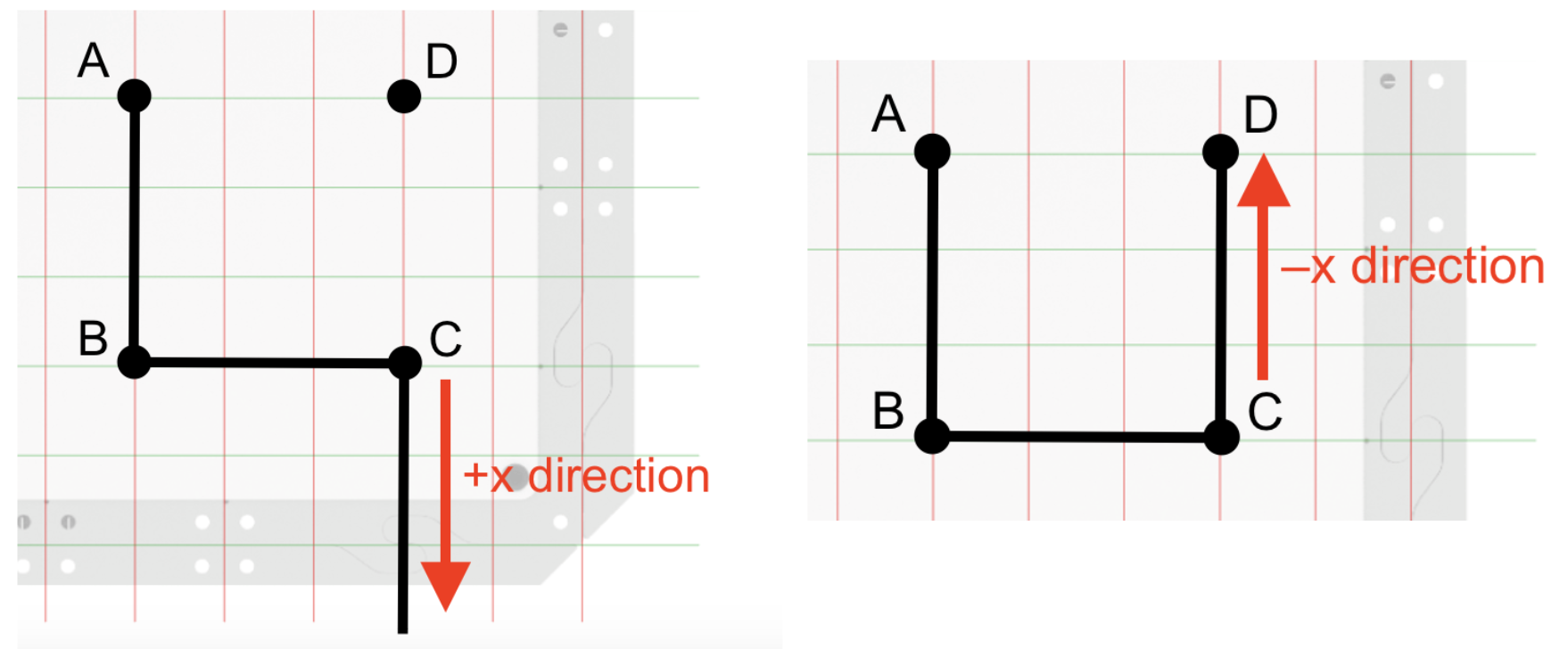
ทั้งสองโครงการในบทเรียนนี้ใช้ข้อมูลเดียวกันแต่วิธีที่ใช้ในรหัสแตกต่างกัน มาดูรายละเอียดโปรเจกต์ของเรากัน ภาพด้านซ้ายมาจากโครงการ ABSOLUTE MOVEMENT ของเรา ความยาวด้านข้าง 75 มม. สอดคล้องกับการเปลี่ยนแปลงพิกัด x ที่จำเป็นในการย้ายจากจุด A ไปยังจุด B
ภาพด้านขวามาจากโครงการเคลื่อนที่สัมพัทธ์ของเรา ที่นี่ความยาวด้านข้าง 75 มม.
สอดคล้องกับระยะที่แขน 6 แกนเคลื่อนที่ไปตามแกน x 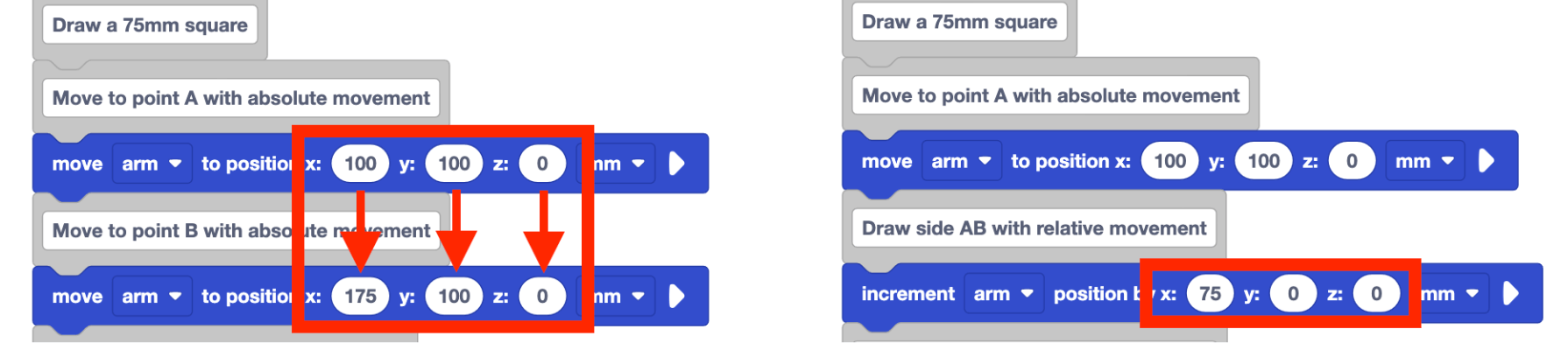
การใช้การเคลื่อนไหวแบบสัมพัทธ์จะช่วยเพิ่มความยืดหยุ่นในโปรเจกต์ของคุณดังนั้นการปรับเปลี่ยนและปรับรหัสของคุณเพื่อวัตถุประสงค์ต่างๆจึงง่ายขึ้น
กิจกรรม
ตอนนี้คุณได้กำหนดรหัสแขนแกน 6
แกนเพื่อเคลื่อนไหวโดยใช้การเคลื่อนไหวแบบสัมบูรณ์และแบบสัมพัทธ์แล้วถึงเวลาฝึกฝนทักษะเหล่านี้แล้ว
ในกิจกรรมนี้คุณจะต้องแก้ไขโปรเจกต์ของคุณเพื่อเขียนรหัสแขน 6
แกนเพื่อวาดสี่เหลี่ยมสามอันบนไวท์บอร์ด 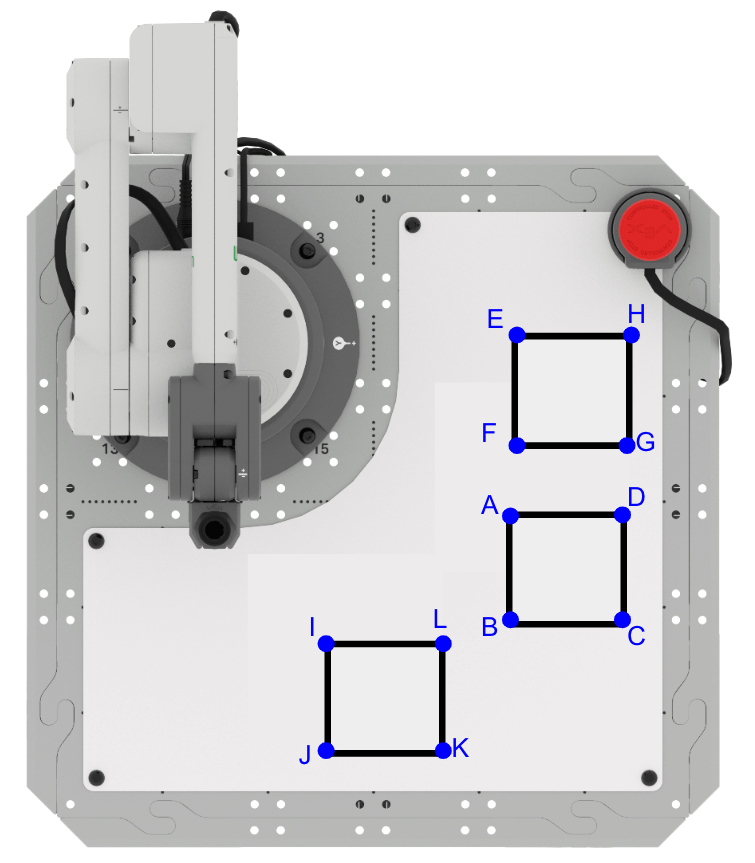
การตั้งค่า: บันทึกข้อมูลต่อไปนี้ลงในสมุดบันทึกวิศวกรรมของคุณ
- พิกัดเริ่มต้นสำหรับแต่ละสี่เหลี่ยมมีดังนี้:
- สแควร์ ABCD (100, 150, 0)
- สี่เหลี่ยม EFGH (-5, 153, 0)
- Square IJKL (155, 57, 0)
- ความยาวด้านข้างทั้งหมดของสี่เหลี่ยมจัตุรัสทั้งสามมีขนาด 50 มม.
- สี่เหลี่ยมไม่สามารถสัมผัสกันได้
กิจกรรม: สร้างโปรเจกต์จากบทเรียนนี้เพื่อเขียนรหัสแขน 6 แกนเพื่อวาดสี่เหลี่ยมอีกสองอัน
- บันทึกแผนสำหรับโครงการของคุณลง ในสมุดบันทึกวิศวกรรมของคุณ ตรวจสอบให้แน่ใจว่ากลุ่มของคุณตกลงว่าจะวาดสี่เหลี่ยมใดก่อนสองและสามรวมถึงการเคลื่อนไหวประเภทใดที่คุณจะใช้ในการวาดให้เสร็จสมบูรณ์
- สร้างโปรเจกต์ของท่านจากบทเรียนนี้เพื่อทำตามแผนของท่านในสมุดบันทึกวิศวกรรมของท่าน
- เรียกใช้โปรเจกต์ของคุณเพื่อทดสอบ ตรวจสอบให้แน่ใจว่าแขน 6 แกนของคุณเชื่อมต่อกับ VEXcode แล้ว โปรเจกต์ของคุณวาดสี่เหลี่ยมทั้งสามตามที่ตั้งใจไว้หรือไม่? เหตุใดจึงรู้สึกเช่นนั้น?
- ทำซ้ำในโปรเจกต์ของคุณต่อไปจนกว่าคุณจะวาดสี่เหลี่ยมทั้งสามได้สำเร็จ
ตั้งชื่อและบันทึกโปรเจกต์ของคุณเมื่อเสร็จสิ้น
ตรวจสอบความเข้าใจของคุณ
ก่อนเริ่มบทเรียนต่อไปตรวจสอบให้แน่ใจว่าท่านเข้าใจแนวคิดในบทเรียนนี้โดยตอบคำถามในเอกสารด้านล่างในสมุดบันทึกวิศวกรรมของท่าน
ตรวจสอบคำถามเกี่ยวกับความเข้าใจของ คุณ > ( Google Doc /.docx /.pdf)
เลือก ถัด > ไปเพื่อไปยังบทเรียนที่ 2