
पाठ 1: सापेक्ष गति
इससे पहले आप विभिन्न आकृतियाँ बनाने के लिए 6-अक्ष भुजा को विशिष्ट निर्देशांकों पर ले जाते थे। इस पाठ में, आप वर्ग बनाने के लिए 6-अक्ष भुजा को स्थानांतरित करने का एक और तरीका सीखेंगे। आपको निरपेक्ष और सापेक्ष गति की अवधारणाओं से परिचित कराया जाएगा, ताकि आप 6-अक्ष भुजा को कोड करने के लिए दोनों प्रकार की गति को संयोजित कर सकें।
इस पाठ में आप सीखेंगे:
- निरपेक्ष और सापेक्ष गति के बीच अंतर.
- किसी प्रोजेक्ट में 6-अक्ष भुजा को इच्छित रूप से स्थानांतरित करने के लिए पूर्ण या सापेक्ष गति कब लागू की जाए।
- सापेक्ष आंदोलनों को कोड करने के लिए किसी प्रोजेक्ट में वृद्धि स्थिति ब्लॉक का उपयोग कैसे करें।
इस पाठ के अंत तक आप निरपेक्ष और सापेक्ष गतियों के संयोजन का उपयोग करके वर्ग बनाने के लिए 6-अक्ष भुजा को कोड करेंगे।
पूर्ण गति के साथ एक वर्ग बनाना
पिछली इकाई में, आपने प्रत्येक बिंदु के निर्देशांक ज्ञात करके तथा 6-अक्ष भुजा को उन विशिष्ट स्थानों पर ले जाकर एक वर्ग बनाया था। आइये इस प्रक्रिया की समीक्षा करें, ताकि हम 6-एक्सिस आर्म द्वारा उपयोग की जा रही गति पर ध्यान दे सकें।
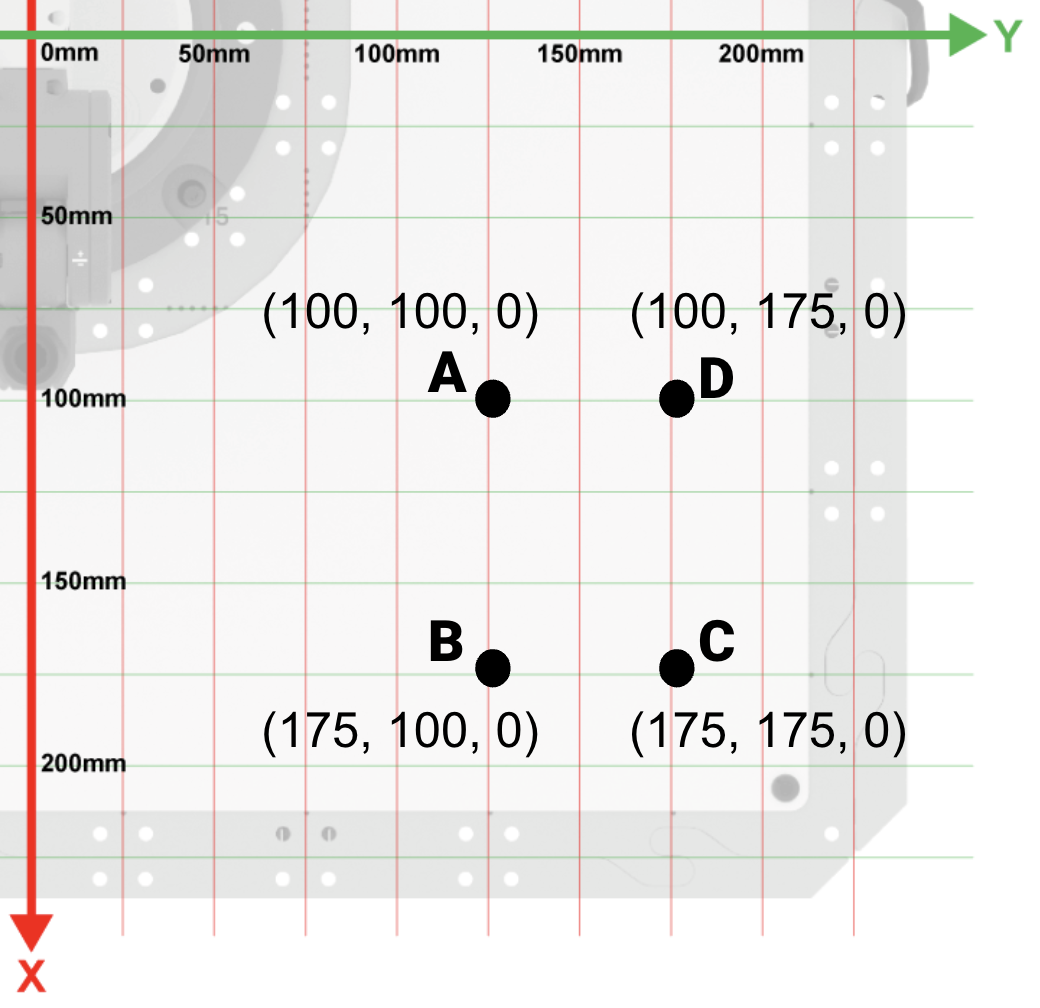
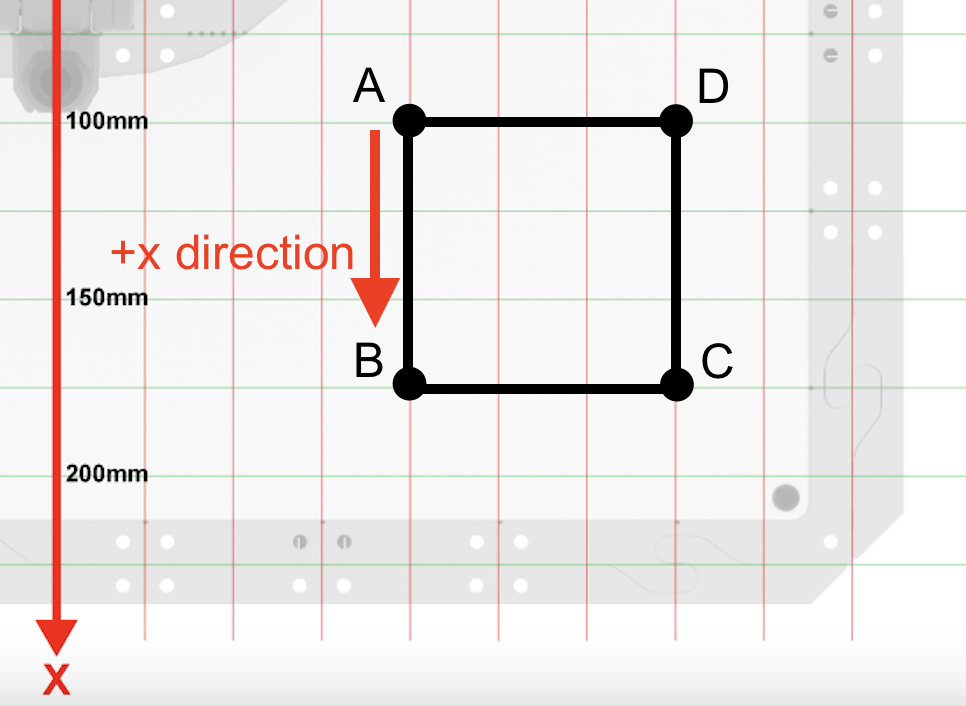
वर्ग ABCD के निर्देशांक का दस्तावेजीकरण करें।
अपनी इंजीनियरिंग नोटबुक में वर्ग के बारे में ज्ञात जानकारी दर्ज करें।
- प्रत्येक पक्ष की लंबाई 75 मिमी है
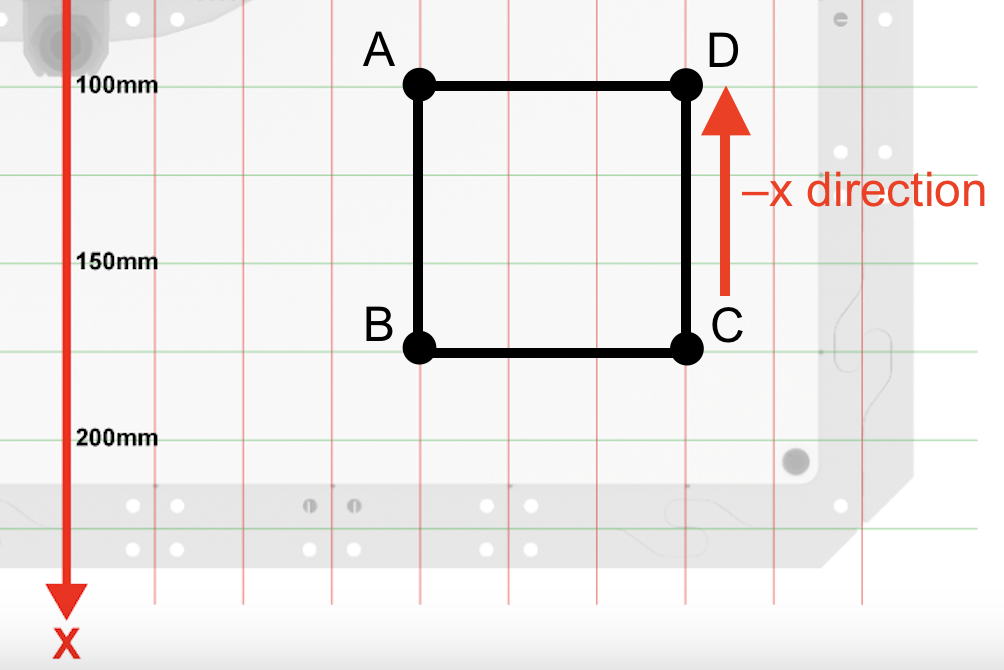
- बिंदु A (100, 100, 0) है
- बिंदु B (175, 100, 0) है
- बिंदु C (175, 175, 0) है
- बिंदु D है (100, 175, 0)
इस वीडियो में दिए गए चरणों का पालन करके एक नया ब्लॉक प्रोजेक्ट खोलें।
फ़ाइल मेनू खोलने के लिए टूलबार में फ़ाइल विकल्प का चयन करें, फिर नए ब्लॉक प्रोजेक्ट का चयन करें। EXP ब्रेन या 6-एक्सिस आर्म के विकल्प के साथ एक पॉप अप विंडो दिखाई देती है। 6-अक्ष आर्मका चयन करें. इसके बाद नई परियोजना खोली जाती है।
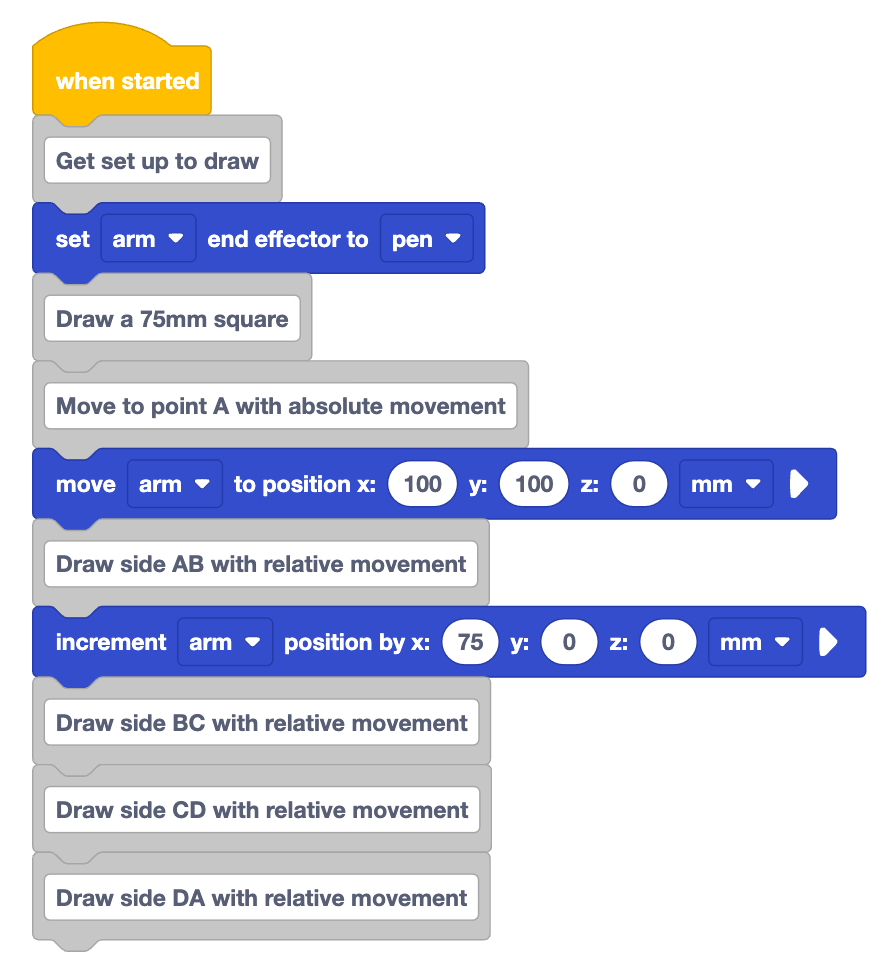
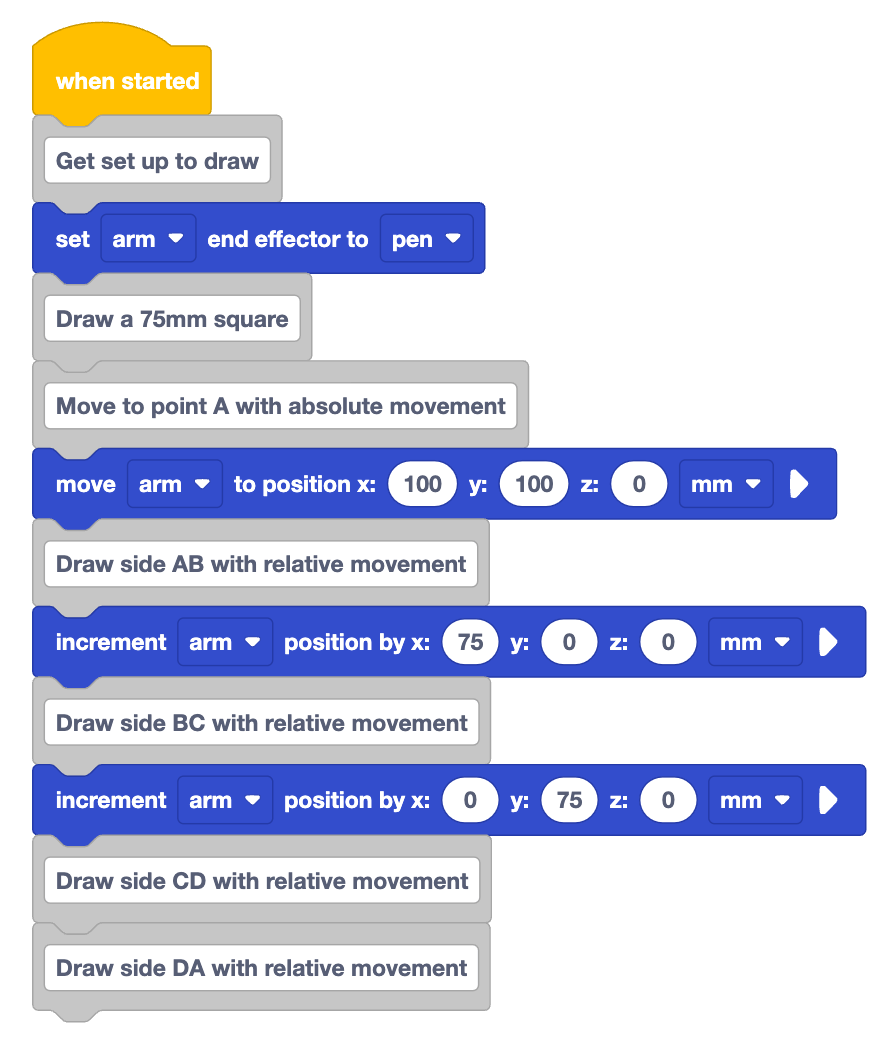
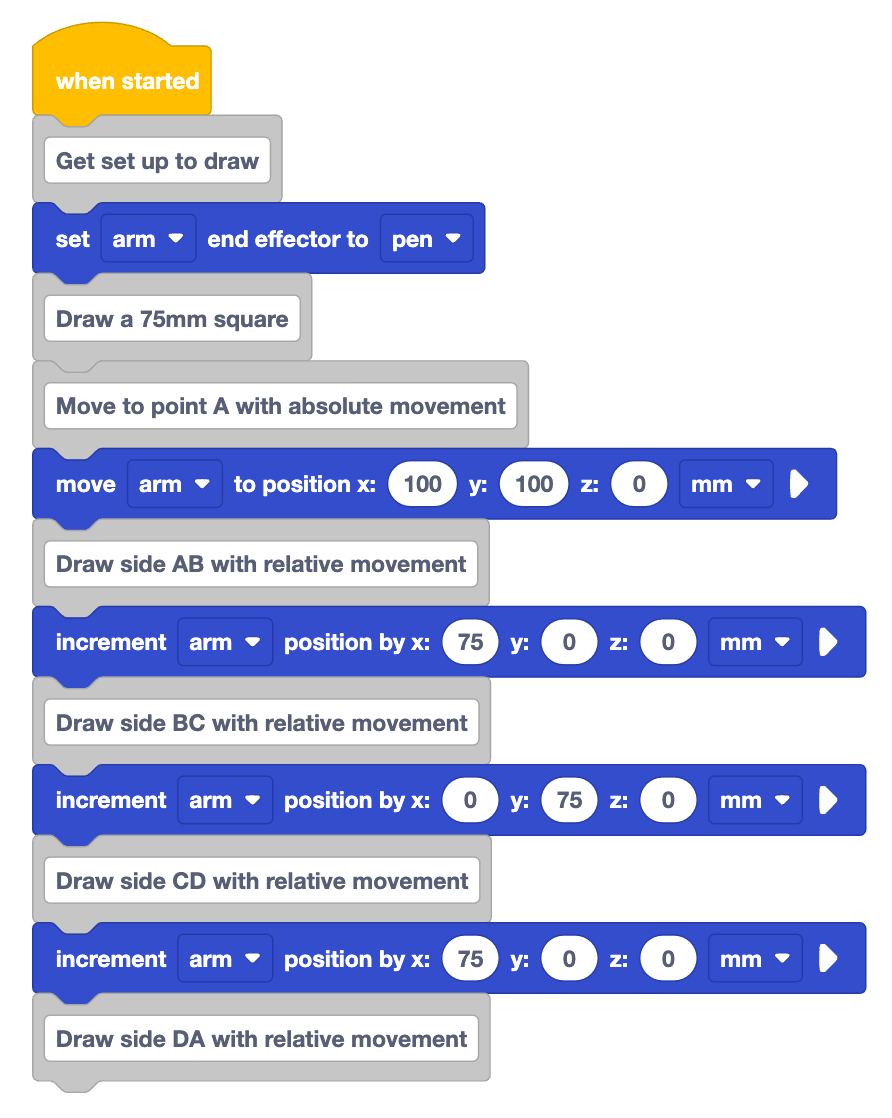
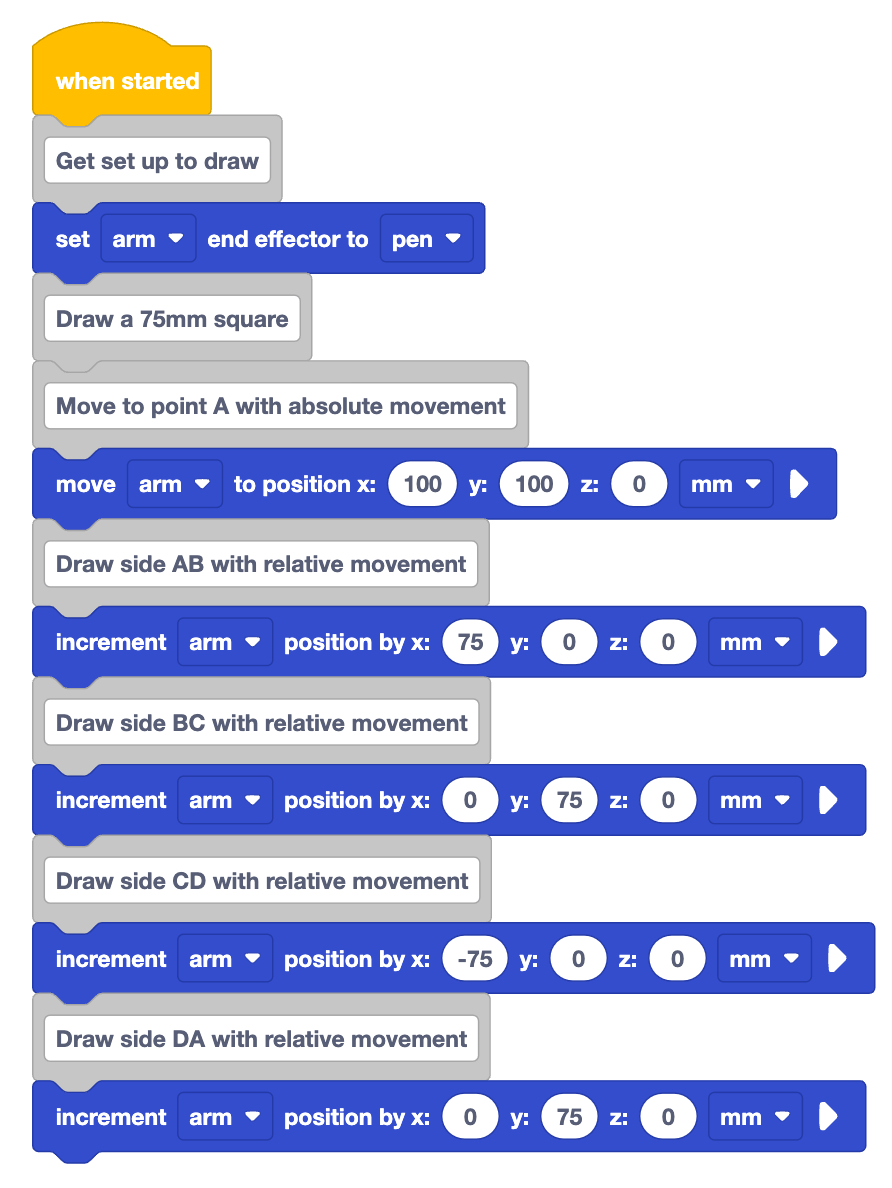
यहां दिखाए गए प्रोजेक्ट को VEXcode में पुनः बनाएं।
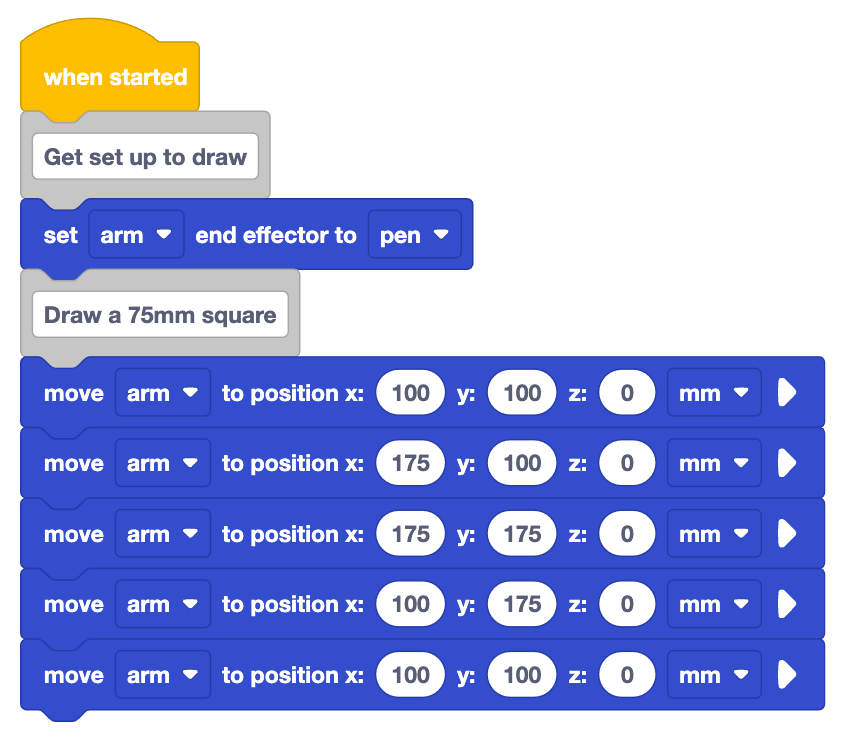
परियोजना में ब्लॉकों को देखें। आपको क्या लगता है कि जब यह परियोजना चलेगी तो 6-एक्सिस आर्म क्या करेगा?
अपनी भविष्यवाणी को अपनी इंजीनियरिंग नोटबुक में दर्ज करें। शब्दों में वर्णन करें कि 6-अक्ष भुजा किस प्रकार घूमेगी, तथा आपके विचार से व्हाइटबोर्ड पर क्या खींचा जाएगा, उसका रेखाचित्र बनाएं।

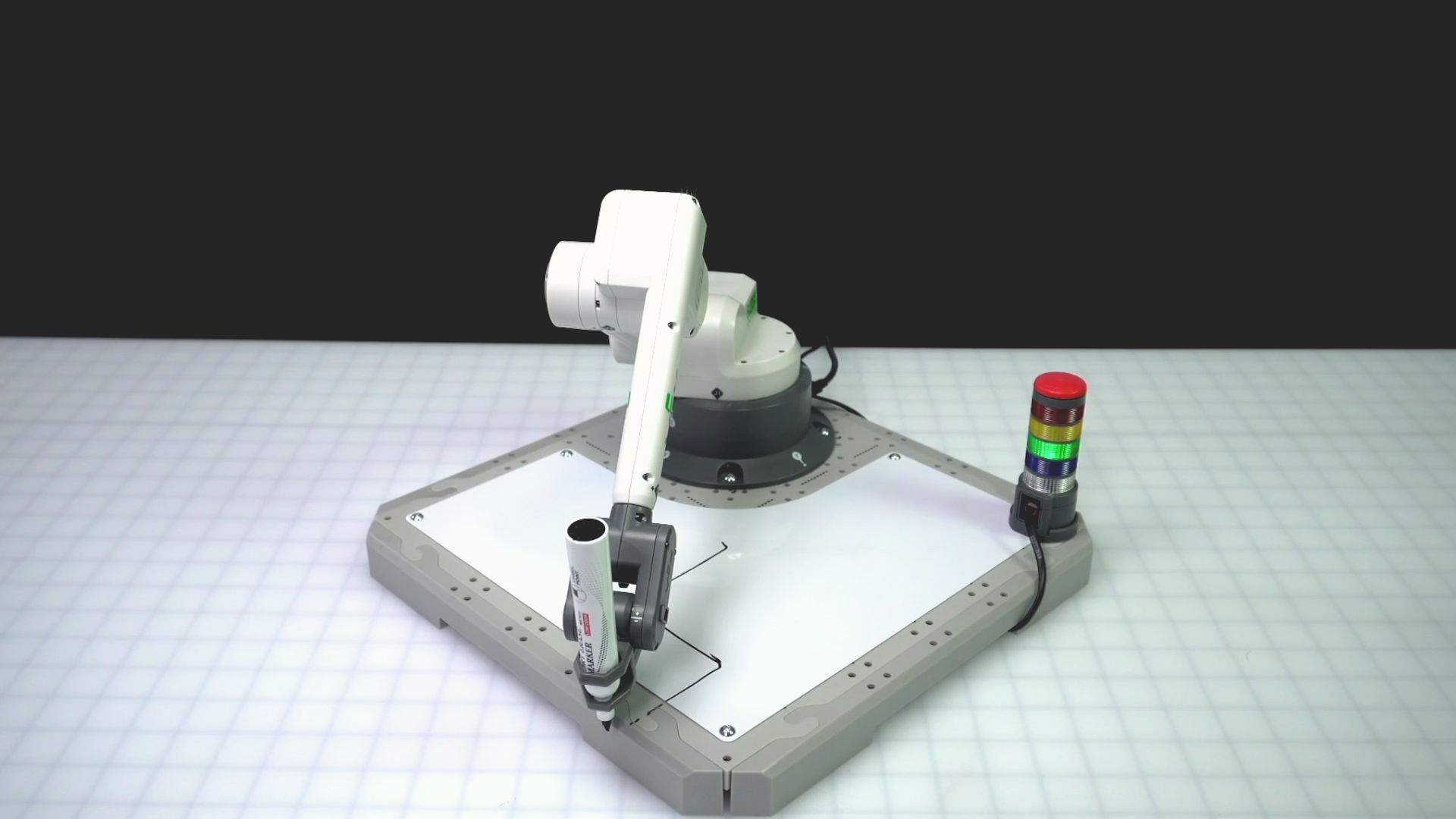
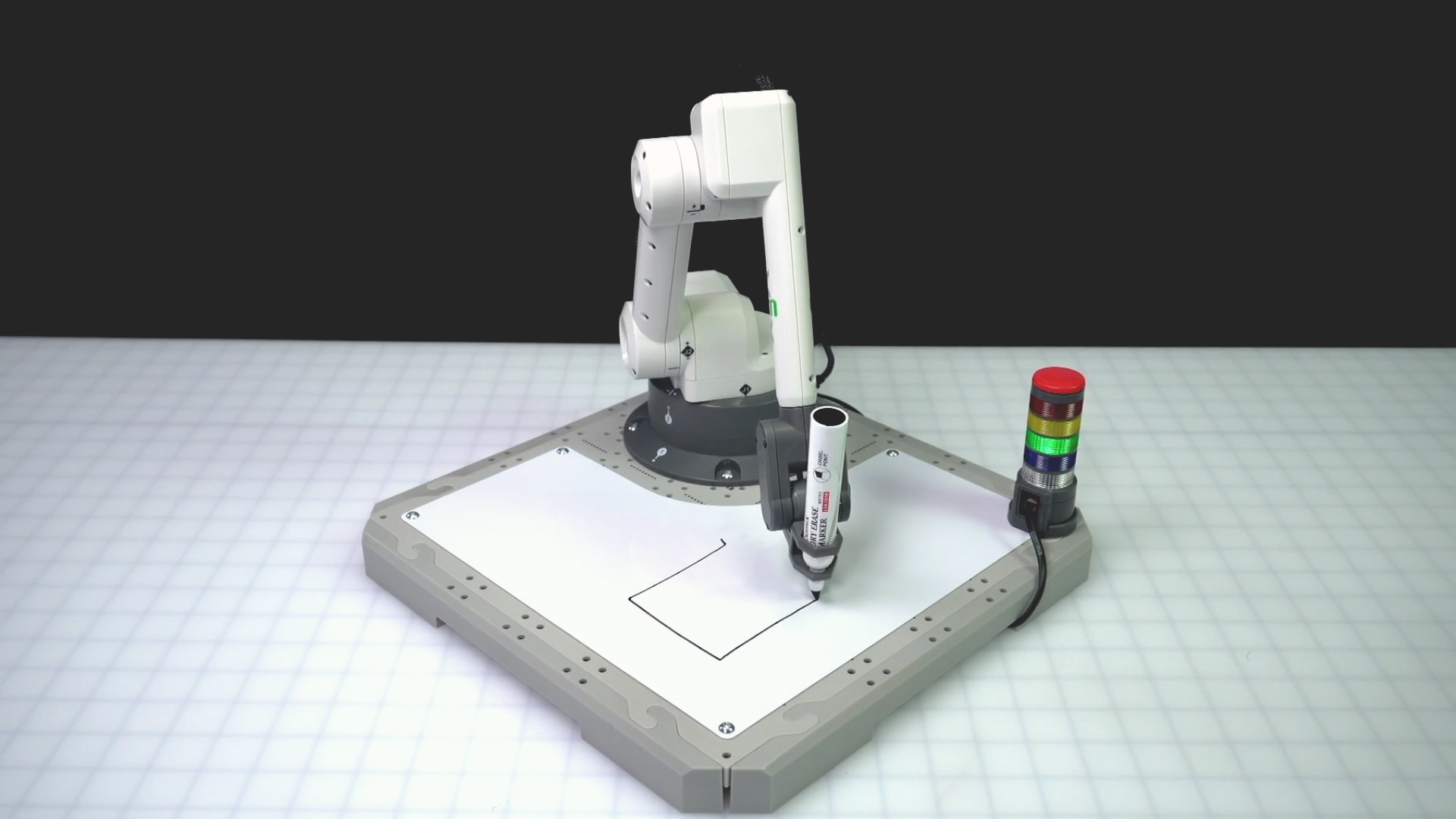
सुनिश्चित करें कि 6-अक्ष आर्म VEXcode से जुड़ा हुआ है। प्रोजेक्ट चलाएँ और 6-अक्ष भुजा के व्यवहार का निरीक्षण करें।
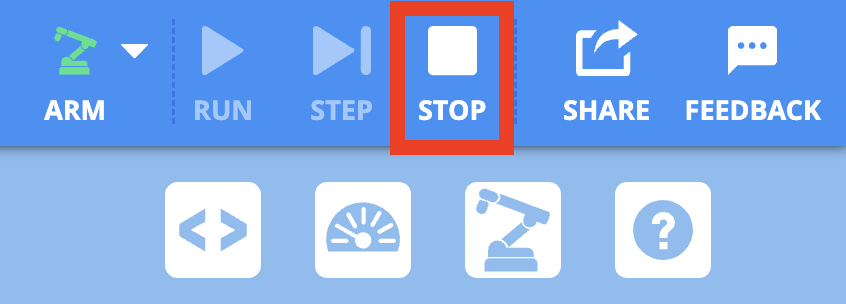
जब 6-अक्ष भुजा चलना समाप्त कर दे तो प्रोजेक्ट रोक दें।
क्या 6-अक्ष भुजा ने वैसा ही चित्र बनाया जैसा आपने अनुमान लगाया था? क्यों या क्यों नहीं?
इस परियोजना में, 6-अक्ष भुजा वर्ग बनाने के लिए निरपेक्ष गति उपयोग करती है। इसका अर्थ यह है कि वर्ग की प्रत्येक भुजा को खींचने के लिए 6-अक्ष भुजा विशिष्ट निर्देशांकों पर चलती है। यह उन्हीं निर्देशांकों पर पहुंचेगा, चाहे 6-अक्ष भुजा पहले कहीं भी स्थित हो। यह कई बार उपयोगी हो सकता है, लेकिन इसके लिए हमें उस आकृति के प्रत्येक बिंदु के लिए सटीक निर्देशांक की आवश्यकता होती है जिसे हम बना रहे हैं। किसी प्रोजेक्ट में वर्ग बनाने के लिए भुजाओं की लंबाई के बारे में जानकारी का उपयोग करने का एक और तरीका है।
सापेक्ष गति के साथ एक वर्ग बनाना
वर्ग की भुजाओं की लंबाई को समझने से हमें यह पता लगाने में मदद मिलती है कि प्रत्येक भुजा को सटीक रूप से खींचने के लिए 6-अक्ष भुजा को अपनी वर्तमान स्थिति से के सापेक्षकितना आगे बढ़ना होगा। वर्ग के चारों कोनों को सटीक रूप से चिह्नित करने के बजाय, हम आकृति को पूरा करने के लिए भुजा प्रारंभिक बिंदु के सापेक्षपर ले जा सकते हैं।
सापेक्ष गति क्या है?
सापेक्ष गति 6-अक्ष भुजा को उसके वर्तमान स्थान के आधार पर एक नई स्थिति में ले जाता है। एक प्रारंभिक बिंदु और वर्ग की भुजाओं की लंबाई को देखते हुए, हम 6-अक्ष भुजा को x और y-अक्षों के साथसापेक्षसे प्रारंभिक स्थिति तक ले जा सकते हैं। आइये इसे 75 मिमी वर्ग के साथ तोड़ें।
हम प्रारंभिक निर्देशांक तक पहुंचने के लिए एक निरपेक्ष गति से शुरुआत करेंगे। वहां से, प्रत्येक पक्ष को सापेक्ष गति के साथ खींचा जा सकता है। 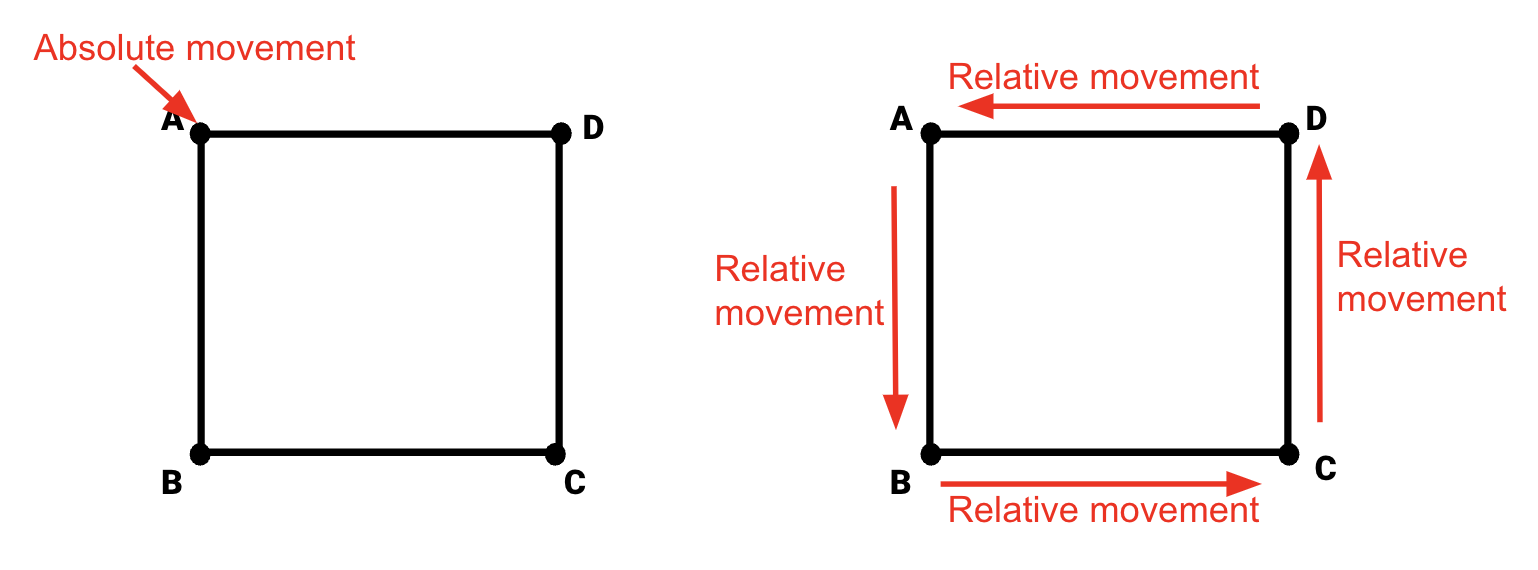
आइये इसे क्रियान्वित होते देखने के लिए अपनी परियोजना को संपादित करें।
को हटाएँ और वर्ग बनाने के लिए उपयोग किए गए ब्लॉक को स्थिति पर ले जाएँ।
यहां दिए गए वीडियो में पहले चलाए गए प्रोजेक्ट के निचले पांच ब्लॉकों को हटाते हुए दिखाया गया है। बचे हुए ब्लॉक दो टिप्पणियाँ और सेट एंड इफ़ेक्टर ब्लॉक हैं।
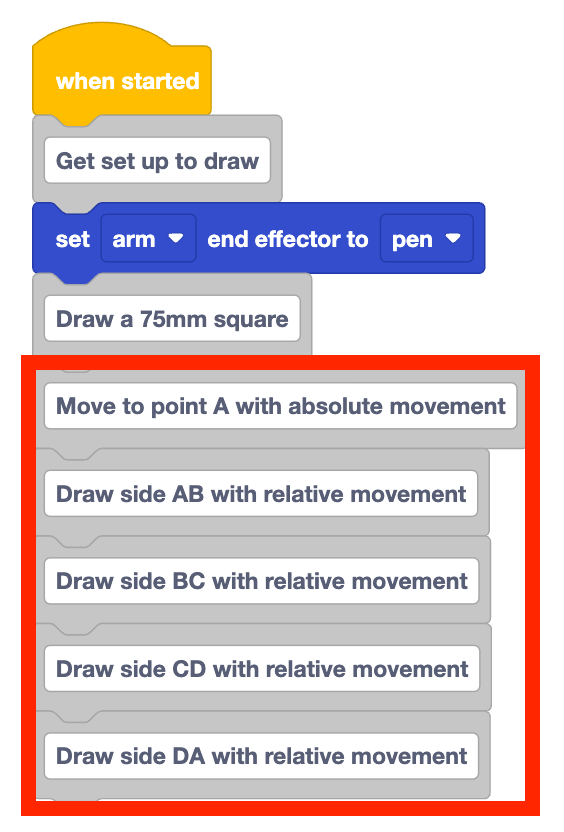
वर्ग के प्रत्येक पक्ष को खींचने के लिए 6-अक्ष भुजा की गति का वर्णन करने के लिए, प्रोजेक्ट में पांच टिप्पणी ब्लॉक जोड़ें। प्रोजेक्ट में निम्नलिखित टिप्पणियाँ लिखें:
- पूर्ण गति के साथ बिंदु A पर जाएँ
- सापेक्ष गति के साथ भुजा AB खींचें
- सापेक्ष गति के साथ भुजा BC खींचें
- सापेक्ष गति के साथ साइड CD बनाएं
- सापेक्ष गति के साथ पक्ष DA बनाएं
इस तरह की टिप्पणियां जोड़ना व्यवस्थित रहने में सहायक होता है, तथा कार्य को पूरा करने के लिए आवश्यक चरणों को क्रम से दिखाता है।
सापेक्ष गति के साथ भुजा AB का आरेखण
"पूर्ण गति के साथ बिंदु A पर जाएं" टिप्पणी के नीचे स्थिति ब्लॉक पर जाएं जोड़ें। पैरामीटर में प्रारंभिक निर्देशांक (बिंदु A) इनपुट करें।
- बिंदु A (100, 100, 0)
यह परियोजना भी पिछली परियोजना की तरह ही शुरू होती है, क्योंकि यह एक पूर्ण आंदोलन के साथ शुरू होती है।

सापेक्ष गति के साथ भुजा AB को खींचने के लिए हम वृद्धि स्थितिब्लॉक का उपयोग करेंगे। 
वृद्धि स्थिति ब्लॉक 6-अक्ष भुजा को x, y, z-अक्षों के साथ एक विशेष दूरी तक ले जाता है। यह वह ब्लॉक है जिसका उपयोग हम 6-अक्ष भुजा को सापेक्ष गति के साथ स्थानांतरित करने के लिए करेंगे। वृद्धि स्थितिब्लॉक 6-अक्ष भुजा को उसके वर्तमान स्थान के सापेक्ष दूरी तक ले जाता है।
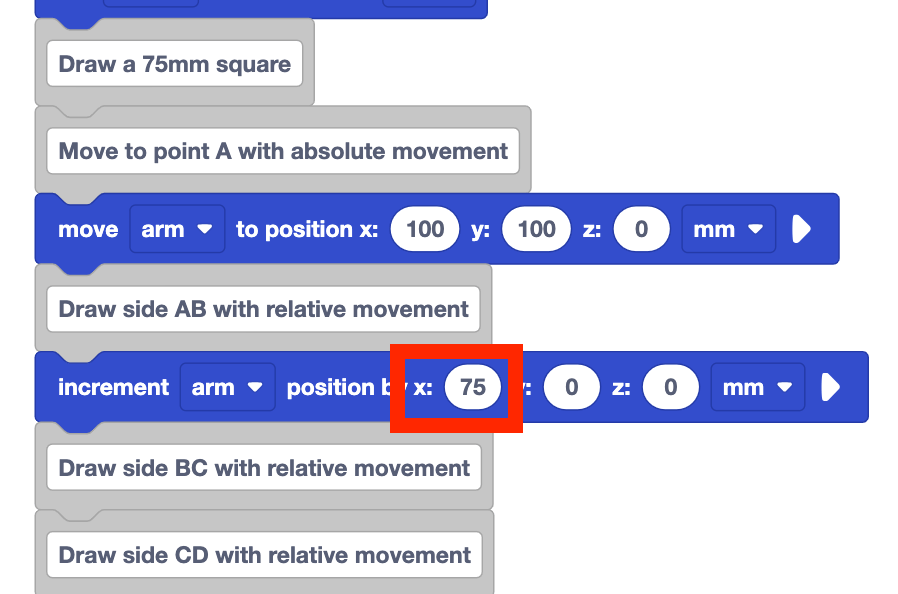
"सापेक्ष गति के साथ भुजा AB बनाएं" टिप्पणी के नीचेवृद्धि स्थिति ब्लॉक जोड़ें।
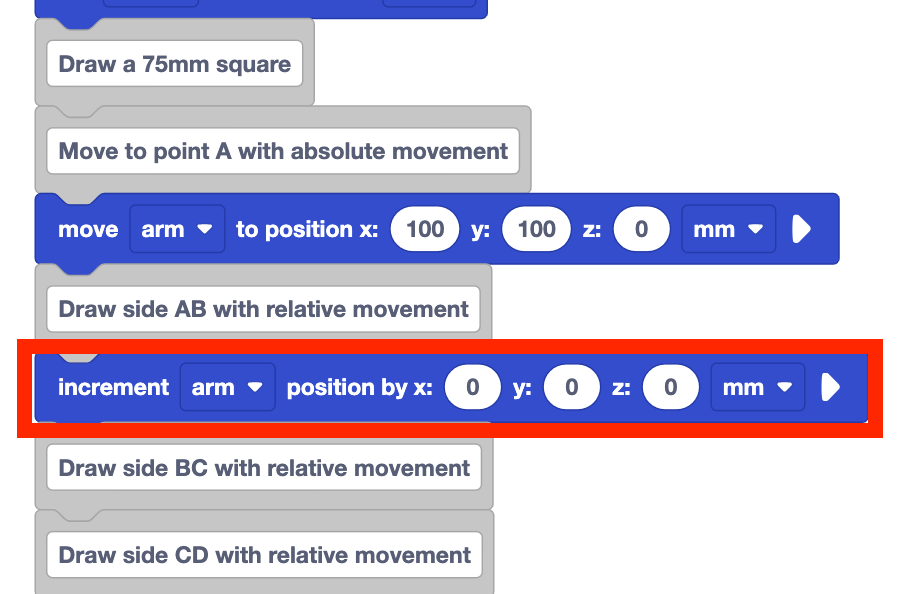
ध्यान दें कि वृद्धि स्थिति ब्लॉक में x, y, और z-अक्षों के लिए पैरामीटर हैं। यहसे संबंधित है कि 6-अक्ष भुजा प्रत्येक अक्ष के साथ कितनी दूरजाएगी, या प्रत्येक अक्ष पर 6-अक्ष भुजा की सापेक्ष गति। ये पैरामीटरहैं न कि, एक निर्देशांक मान, जैसे वे स्थिति पर जाएँ ब्लॉक में थे, जब 6-अक्ष भुजा ने पूर्ण गति का उपयोग किया था।
वर्ग की एक भुजा खींचने के लिए आवश्यक पैरामीटर निर्धारित करने के लिए दो प्रकार की जानकारी की आवश्यकता होती है:
- वर्तमान स्थिति के सापेक्ष 6-अक्ष भुजा को स्थानांतरित करने की दूरी
- वह अक्ष या अक्ष जिनके साथ 6-अक्ष भुजा गति करेगी
वर्ग की भुजा AB खींचने के लिए, 6-अक्ष भुजा वर्तमान स्थिति के सापेक्ष जितनी दूरी तय करेगी, वह भुजा की लंबाई या 75 मिमी है। बिंदु A से बिंदु B तक जाने के लिए, 6-अक्ष भुजा x-अक्ष के साथ धनात्मक दिशा में चलेगी। यह y या z-अक्ष के अनुदिश गति नहीं करेगा।
इन्क्रीमेंट स्थिति ब्लॉक में x पैरामीटर को 75 पर सेट करें। y और z पैरामीटर 0 रहते हैं।
इससे 6-अक्ष भुजा केवल x-अक्ष के साथ-साथ, धनात्मक दिशा में 75 मिमी तक घूमेगी।
इस परियोजना को अभी जैसी स्थिति में है, वैसा ही देखें। आपको क्या लगता है कि जब इसे चलाया जाएगा तो 6-एक्सिस आर्म क्या करेगा?
अपनी भविष्यवाणी को अपनी इंजीनियरिंग नोटबुक में दर्ज करें। आप जो सोचते हैं कि 6-अक्ष भुजा बनाएगी, उसे बनाएं।
सुनिश्चित करें कि 6-अक्ष आर्म VEXcode से जुड़ा हुआ है। प्रोजेक्ट चलाएँ और 6-अक्ष भुजा के व्यवहार का निरीक्षण करें।

जब 6-अक्ष भुजा चलना बंद कर दे तो प्रोजेक्ट रोक दें।
क्या 6-अक्ष भुजा आपके पूर्वानुमान के अनुसार चली? क्यों या क्यों नहीं?
सापेक्ष गति के साथ भुजा BC का आरेखण
हमने वर्ग की पहली भुजा खींचने के लिए जो सीखा था, उसे हम भुजा BC खींचने के लिए लागू कर सकते हैं।
टिप्पणी "सापेक्ष गति के साथ भुजा BC बनाएं" के नीचे ब्लॉक परवृद्धि स्थिति जोड़ें।
वृद्धि स्थितिब्लॉक के पैरामीटर निर्धारित करें।
भुजा BC को खींचने के लिए 6-अक्ष भुजा को 75 मिमी तक घुमाना होगा। वर्तमान स्थिति के सापेक्ष गति की दिशा को देखते हुए, हम देखते हैं कि 6-अक्ष भुजा को y-अक्ष के साथ गति करने की आवश्यकता है। 6-अक्ष भुजा को x या z-अक्ष के अनुदिश नहीं चलना चाहिए।
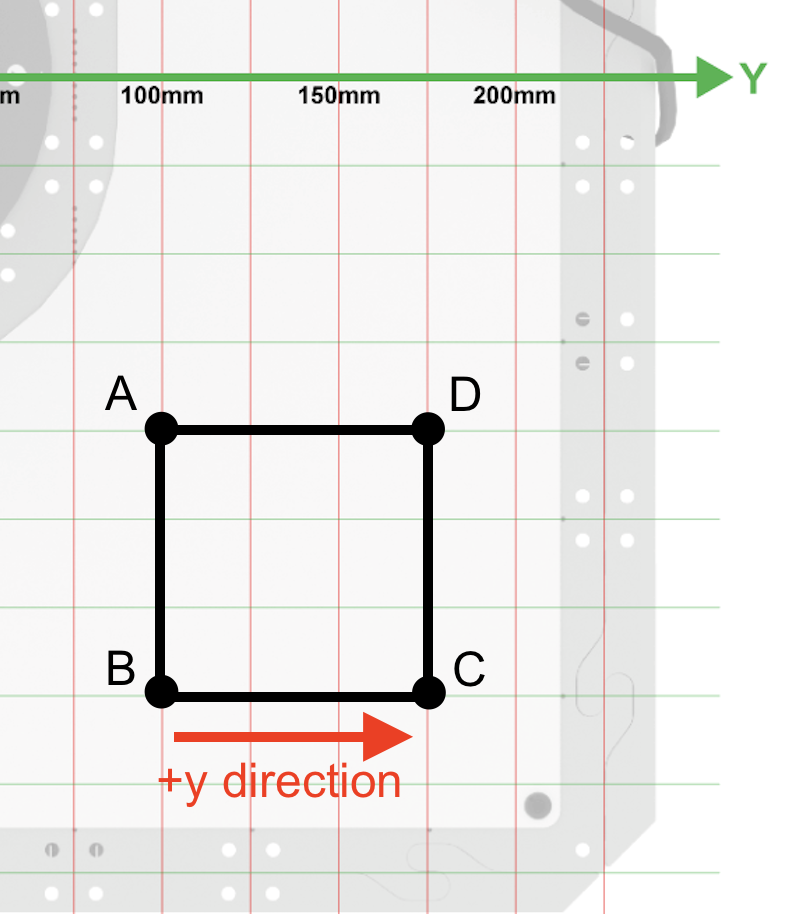
वृद्धि स्थितिब्लॉक के y पैरामीटर को 75 पर सेट करें।
इससे 6-अक्ष भुजा y-अक्ष के साथ 75 मिमी तक आगे बढ़ेगी। चूंकि x और z-अक्षों के लिए पैरामीटर 0 हैं, इसलिए 6-अक्ष भुजा x या z-अक्षों पर नहीं चलेगी।
अनुमान लगाएं कि आपके विचार से परियोजना चलने पर 6-अक्ष भुजा किस प्रकार गति करेगी। अपनी भविष्यवाणी को अपनी इंजीनियरिंग नोटबुक में दर्ज करें।
आपके विचार से 6-अक्ष भुजा क्या खींचेगी, उसका रेखाचित्र बनाएं।
प्रोजेक्ट चलाएँ और 6-अक्ष भुजा के व्यवहार का निरीक्षण करें।
जब 6-अक्ष भुजा चलना समाप्त कर दे तो प्रोजेक्ट रोक दें।
क्या 6-अक्ष भुजा ने वैसा ही चित्र बनाया जैसा आपने अनुमान लगाया था? क्यों या क्यों नहीं?
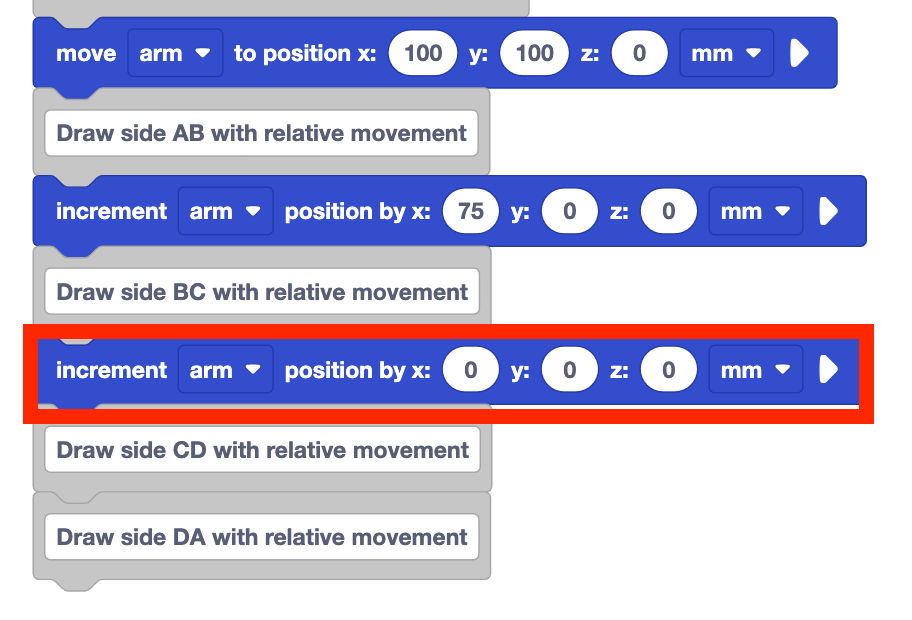
सापेक्ष गति के साथ साइड सीडी का चित्रण
अब जबकि हमने वर्ग की पहली दो भुजाएँ खींच ली हैं, हम भुजा CD खींचने के लिए अपने प्रोजेक्ट पर काम जारी रख सकते हैं।
टिप्पणी "सापेक्ष गति के साथ साइड CD बनाएं" के नीचे ब्लॉक परवृद्धि स्थिति जोड़ें।
वृद्धि स्थितिब्लॉक के लिए पैरामीटर निर्धारित करें।
साइड सीडी बनाने के लिए, साइड की लंबाई अभी भी 75 मिमी है। 6-अक्ष भुजा की वर्तमान स्थिति के सापेक्ष उस गति की दिशा को देखते हुए, हम पाते हैं कि गति पुनः x-अक्ष के अनुदिश है।
6-अक्ष भुजा को वर्ग के इस ओर y या z-अक्ष पर नहीं घूमना चाहिए।
वृद्धि स्थितिब्लॉक के x पैरामीटर को 75 पर सेट करें।

अनुमान लगाएं कि आपके विचार से परियोजना चलने पर 6-अक्ष भुजा किस प्रकार गति करेगी। अपनी भविष्यवाणी को अपनी इंजीनियरिंग नोटबुक में दर्ज करें, तथा यह सुनिश्चित करें कि आप जो सोचते हैं उसका एक रेखाचित्र भी इसमें शामिल करें।
प्रोजेक्ट चलाएँ और 6-अक्ष भुजा के व्यवहार का निरीक्षण करें।
क्या यह वैसा ही बना जैसा आपने अनुमान लगाया था? क्यों या क्यों नहीं?

6-एक्सिस आर्म नेनहीं बल्किड्रॉ साइड CD किया जैसा कि अपेक्षित था।
आइये देखें कि ऐसा क्यों हुआ। भुजा की लंबाई में कोई परिवर्तन नहीं हुआ, अतः खींची गई रेखा की लंबाई सही है। हालाँकि, उस आंदोलन कीदिशानहीं है।
हम वृद्धि स्थितिब्लॉक में पैरामीटर को सकारात्मक या नकारात्मक संख्या के रूप में दर्ज करके सकारात्मक या नकारात्मक दिशा में आगे बढ़ने का हिसाब लगा सकते हैं।
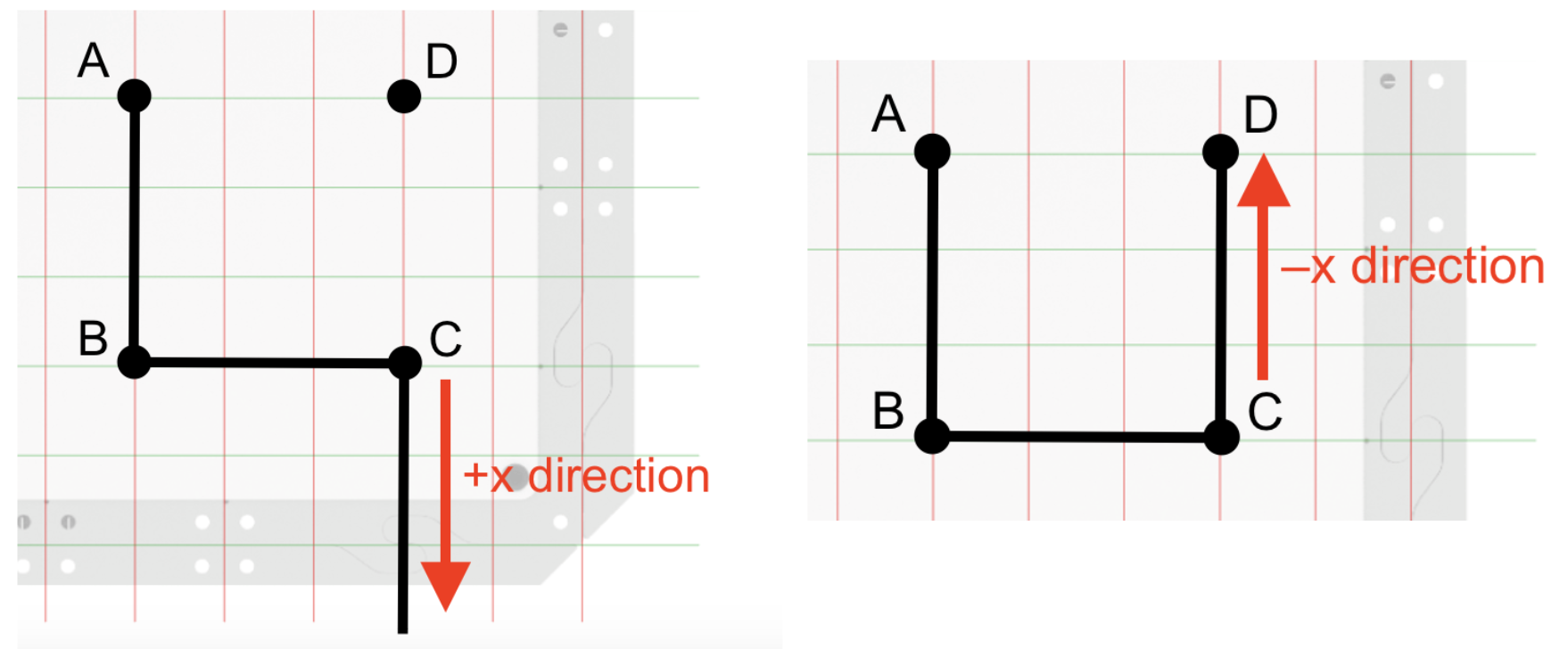
भुजा AB और BC के लिए, 6-अक्ष भुजा x और y-अक्षों के साथ धनात्मक दिशा में गति कर रही थी, इसलिए हमने धनात्मक संख्या का उपयोग किया। लेकिन साइड CD को खींचने के लिए, 6-अक्ष भुजा कोऋणात्मकदिशा में चलना होगा, इसलिए हमें पैरामीटर में ऋणात्मक मान का उपयोग करना होगा।
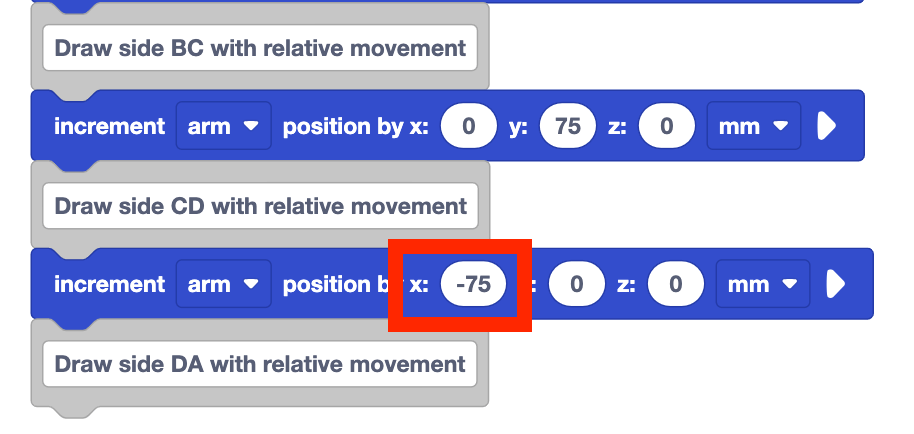
इन्क्रीमेंट स्थिति ब्लॉक के x पैरामीटर को –75 पर सेट करें।
यह 6-अक्ष भुजा को x-अक्ष के साथऋणात्मकदिशा में 75 मिमी तक ले जाएगा। y और z-अक्ष के मानों को बदलने की आवश्यकता नहीं है, क्योंकि 6-अक्ष भुजा अभी भी भुजा CD खींचने के लिए उन अक्षों के साथ गति नहीं कर रही है।
प्रोजेक्ट को पुनः चलाएँ, और 6-अक्ष भुजा के व्यवहार का निरीक्षण करें।
क्या साइड सीडी इच्छित रूप से खींची गई है? क्यों या क्यों नहीं?
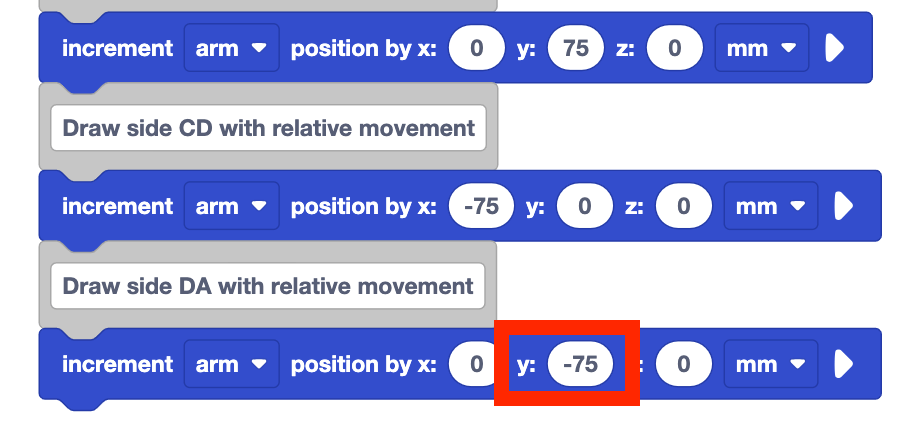
सापेक्ष गति के साथ साइड DA का आरेखण
अब जबकि हमने वर्ग की तीन भुजाएँ खींच ली हैं, तो हम अंतिम भुजा खींचने के लिए जो सीखा है उसे लागू कर सकते हैं।
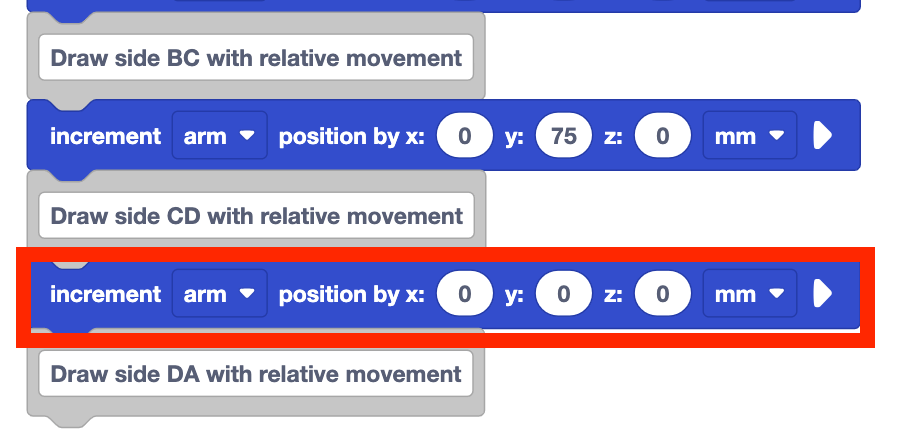
टिप्पणी "सापेक्ष गति के साथ साइड DA बनाएं" के नीचे ब्लॉक परवृद्धि स्थिति जोड़ें।
वृद्धि स्थिति ब्लॉक के लिए पैरामीटर निर्धारित करें।
साइड DA बनाने के लिए, 6-एक्सिस आर्म को पुनः 75 मिमी तक घुमाया जाता है। वर्तमान स्थिति के आधार पर उस गति की दिशा को देखते हुए, 6-अक्ष भुजा को पुनः y-अक्ष के साथ चलना होगा। इसे भुजा DA खींचने के लिए x या z-अक्ष के साथ चलने की आवश्यकता नहीं है।

वृद्धि स्थिति ब्लॉक के y-पैरामीटर को 75 पर सेट करें। x और z-पैरामीटर 0 रहना चाहिए.
भविष्यवाणी करें कि 6-अक्ष भुजा किस प्रकार गति करेगी तथा परियोजना चलने पर क्या खींचेगी। अपनी भविष्यवाणी को अपनी इंजीनियरिंग नोटबुक में दर्ज करें।
प्रोजेक्ट चलाएँ और 6-अक्ष भुजा के व्यवहार का निरीक्षण करें।
क्या यह वैसा ही चलता है जैसा आपने अनुमान लगाया था? क्या यह वर्ग की अंतिम भुजा को इच्छित रूप में खींचता है? क्यों या क्यों नहीं?

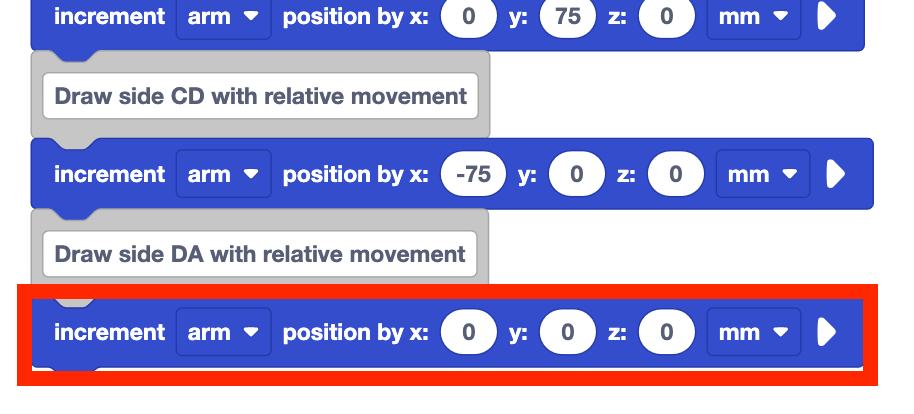
इच्छित रूप से DA भुजा खींचने के लिए, 6-अक्ष भुजा को y-अक्ष के साथऋणात्मकदिशा में ले जाने की आवश्यकता थी। हालाँकि, हमने y-पैरामीटर को 75 मिमी पर सेट किया है, जो दर्शाता है कि 6-अक्ष भुजा को y-अक्ष के साथधनात्मकदिशा में चलना चाहिए।

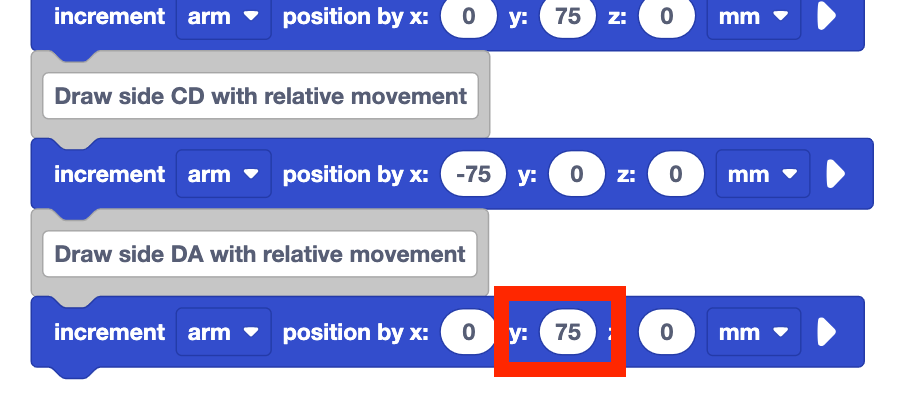
अंतिम वृद्धि स्थितिब्लॉक के y पैरामीटर को –75 पर सेट करें। x और z पैरामीटर 0 ही रहने चाहिए, क्योंकि 6-अक्ष भुजा को इच्छित रूप से DA पक्ष खींचने के लिए इन अक्षों पर गति करने की आवश्यकता नहीं है।
वर्ग को पूरा करने के लिए 6-अक्ष भुजा को अब y-अक्ष के साथ ऋणात्मक दिशा में चलना चाहिए।
प्रोजेक्ट चलाएं और 6-अक्ष भुजा की गति का निरीक्षण करें।
क्या यह इच्छित रूप से वर्ग खींचता है? क्यों या क्यों नहीं?
अपने प्रोजेक्ट का नाम बदलना और उसे सहेजना सुनिश्चित करें।

सापेक्ष गति का उपयोग क्यों करें?
जबकि 6-अक्ष भुजा की गति निरपेक्ष और सापेक्ष दोनों गति के साथ 75 मिमी वर्ग खींचने के लिए समान है, जब हम सापेक्ष गति का उपयोग करते हैं तो अतिरिक्त लचीलापन और आसानी होती है। उदाहरण के लिए, यदि आप किसी अलग स्थान पर 75 मिमी का वर्ग बनाना चाहते हैं, तो आप क्या करेंगे? पूर्ण गति का उपयोग करके, आप सभी चार बिंदुओं के नए निर्देशांक ज्ञात करेंगे और उन्हें जोड़ने के लिए 6-अक्ष भुजा को कोड करेंगे। हालाँकि सापेक्ष गति का उपयोग करते हुए, आपको केवल प्रारंभिक निर्देशांक जानने की आवश्यकता होती है, और बाकी सब समान रहता है।
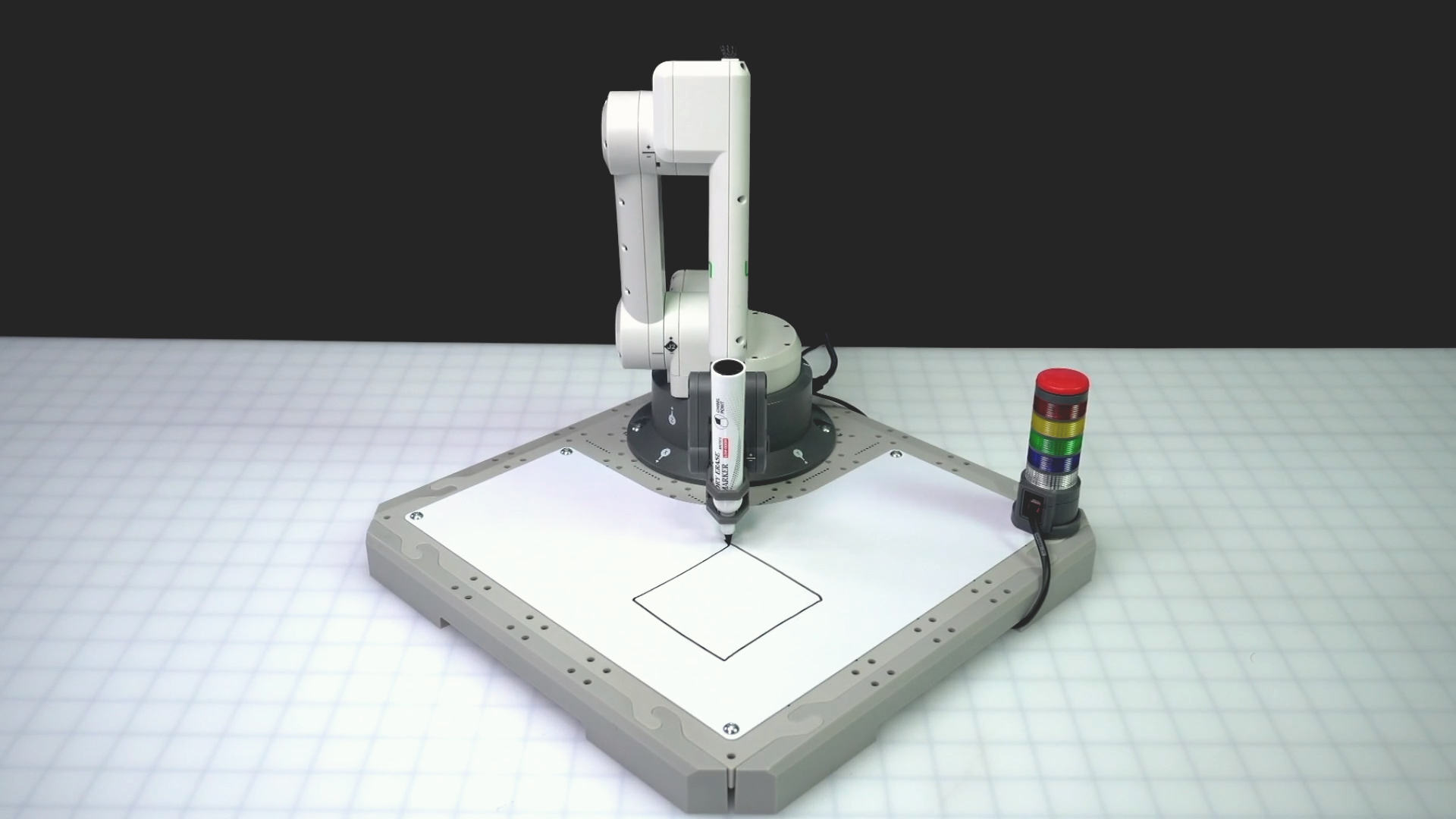
पूर्ण गति आपको सदैव एक ही निर्देशांक पर ले जाएगी, चाहे प्रारंभिक स्थान कोई भी हो। यह तब उपयोगी होता है जब आपको किसी परियोजना को शुरू करने के लिए 6-अक्ष भुजा को किसी विशिष्ट स्थान पर ले जाने की आवश्यकता होती है, या यह सुनिश्चित करने के लिए कि आप पिछले निर्देशांकों की परवाह किए बिना उस स्थान तक पहुंच सकते हैं। नीचे दिए गए वीडियो में व्हाइटबोर्ड अटैचमेंट पर तीन अलग-अलग स्थानों से शुरू होने वाले मार्कर को दिखाया गया है। सभी मार्कर स्थान (75, 75, 0) पर चले जाते हैं क्योंकि वे पूर्ण गति के साथ आगे बढ़ रहे हैं।
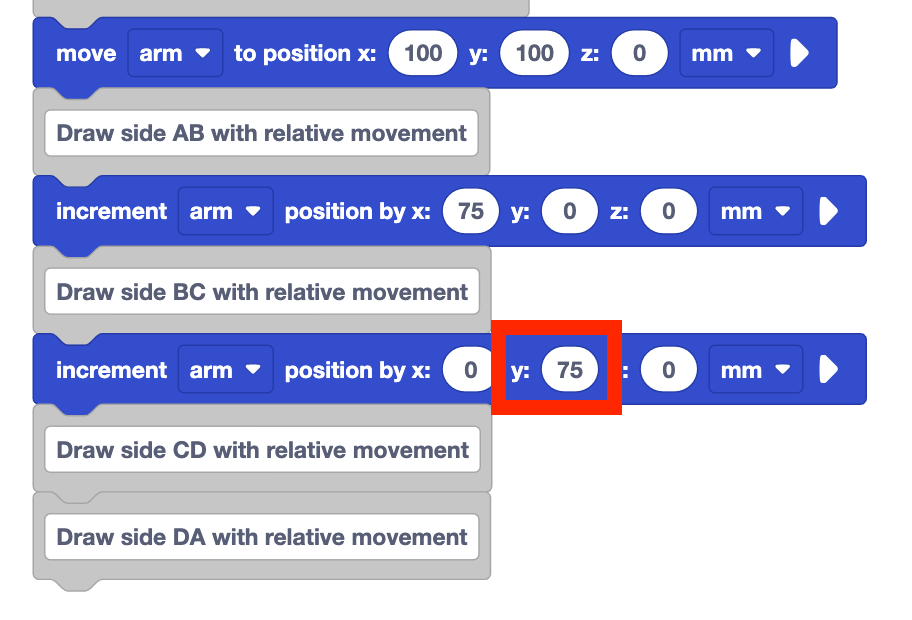
सापेक्षिक गतिविधि वर्तमान स्थिति के आधार पर एक नए स्थान पर जाएगी। यह तब उपयोगी होता है जब आपको 6-अक्ष भुजा को किसी ज्ञात स्थान के सापेक्ष स्थानांतरित करने की आवश्यकता होती है, जैसे आपने वर्ग बनाते समय या किसी विशिष्ट पैटर्न में स्थानांतरित करने के लिए किया था। नीचे दिए गए वीडियो में व्हाइटबोर्ड अटैचमेंट पर ऊपर दिखाए गए तीन स्थानों से शुरू होने वाला मार्कर दिखाया गया है। सभी मार्कर एक ही समय पर विकर्ण रूप से चलते हैं क्योंकि उनके x मान में 75 की वृद्धि हुई थी और उनके y मान में भी एक ही समय पर 75 की वृद्धि हुई थी। मार्करों के अंतिम स्थान सभी अलग-अलग हैं और x और y मानों में वृद्धि के साथ सीधे उनकी प्रारंभिक स्थिति से संबंधित हैं।
इस पाठ में दोनों परियोजनाओं में एक ही जानकारी का उपयोग किया गया, लेकिन कोड में इसका उपयोग करने का तरीका अलग था। आइये हम अपनी परियोजनाओं पर अधिक विस्तार से नजर डालें। बाईं ओर की छवि हमारे पूर्ण आंदोलन परियोजना से है। 75 मिमी की भुजा लंबाई बिंदु A से बिंदु B तक जाने के लिए आवश्यक x-निर्देशांक में परिवर्तन के अनुरूप है।
दाईं ओर की छवि हमारे सापेक्ष आंदोलन परियोजना से है। यहां 75 मिमी की पार्श्व लंबाई इस बात से मेल खाती है कि 6-अक्ष भुजा x-अक्ष के साथ कितनी दूर तक चलती है। 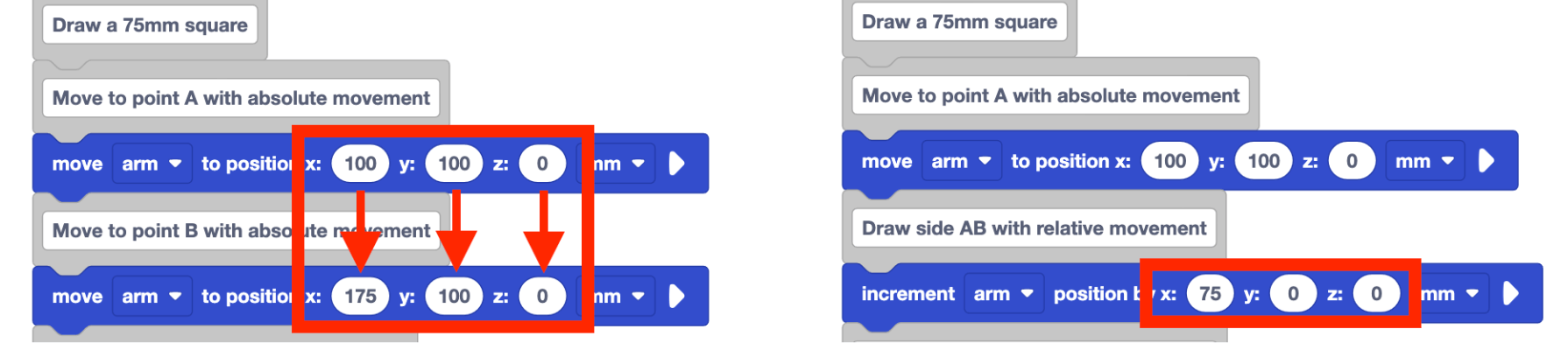
सापेक्ष गति का उपयोग करने से आपको अपनी परियोजना में अतिरिक्त लचीलापन मिल सकता है, इसलिए विभिन्न प्रयोजनों के लिए अपने कोड को अनुकूलित और समायोजित करना आसान बनाएं।
गतिविधि
अब जबकि आपने 6-अक्षीय भुजा को निरपेक्ष और सापेक्ष दोनों प्रकार की गति का उपयोग करके गति करने के लिए कोडित कर लिया है, तो अब इन कौशलों का अभ्यास करने का समय आ गया है। इस गतिविधि में, आप व्हाइटबोर्ड पर तीन वर्ग बनाने के लिए 6-अक्ष भुजा को कोड करने के लिए अपने प्रोजेक्ट को संपादित करेंगे। 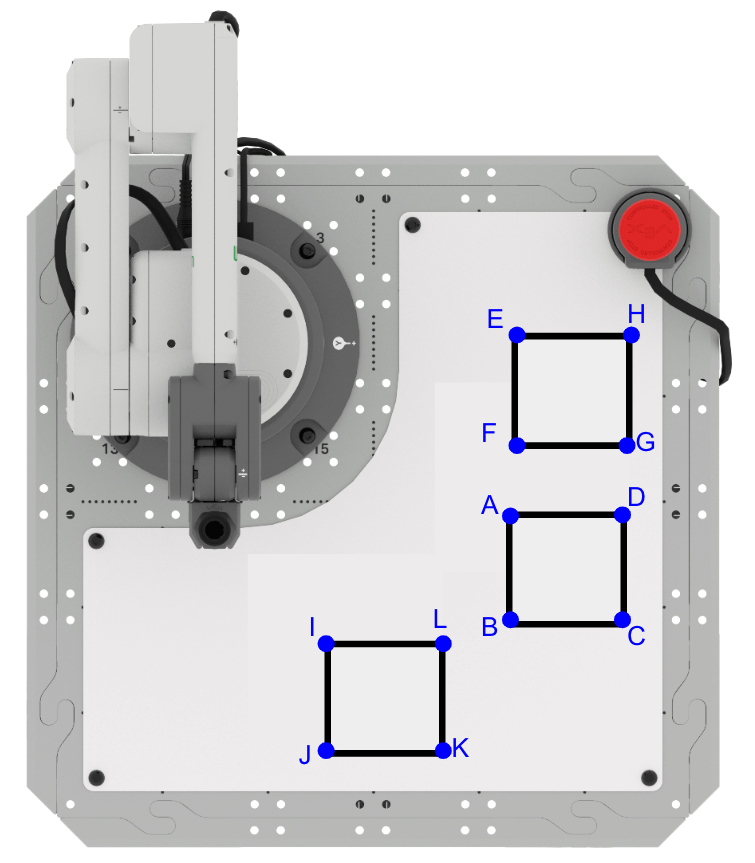
सेटअप: अपनी इंजीनियरिंग नोटबुक में निम्नलिखित जानकारी रिकॉर्ड करें।
- प्रत्येक वर्ग के लिए प्रारंभिक निर्देशांक इस प्रकार हैं:
- वर्ग ABCD (100, 150, 0)
- वर्ग EFGH (-5, 153, 0)
- स्क्वायर IJKL (155, 57, 0)
- तीनों वर्गों की सभी भुजाओं की लंबाई 50 मिमी है।
- वर्ग एक दूसरे को स्पर्श नहीं कर सकते।
गतिविधि:इस पाठ से अपने प्रोजेक्ट पर काम करते हुए 6-अक्ष भुजा को कोड करें और दो अतिरिक्त वर्ग बनाएं।
- अपनी इंजीनियरिंग नोटबुक में अपनी परियोजना के लिए एक योजना रिकॉर्ड करें। सुनिश्चित करें कि आपका समूह इस बात पर सहमत हो कि पहला, दूसरा और तीसरा वर्ग कौन सा बनाना है, साथ ही चित्रों को पूरा करने के लिए आप किस प्रकार की गतिविधियों का उपयोग करेंगे।
- अपनी इंजीनियरिंग नोटबुक में अपनी योजना का पालन करने के लिए इस पाठ से अपनी परियोजना का निर्माण करें।
- अपने प्रोजेक्ट का परीक्षण करने के लिए उसे चलाएँ। सुनिश्चित करें कि आपका 6-एक्सिस आर्म VEXcode से जुड़ा हुआ है। क्या आपकी परियोजना में तीनों वर्ग इच्छित रूप से बनाये गये हैं? क्यों या क्यों नहीं?
- जब तक आप सफलतापूर्वक सभी तीन वर्ग नहीं बना लेते, तब तक अपने प्रोजेक्ट पर काम करते रहें। जब आप अपना काम पूरा कर लें तो अपने प्रोजेक्ट को नाम दें और सेव करें।
अपनी समझ की जाँच करें
अगला पाठ शुरू करने से पहले, सुनिश्चित करें कि आप अपनी इंजीनियरिंग नोटबुक में नीचे दिए गए दस्तावेज़ में दिए गए प्रश्नों के उत्तर देकर इस पाठ की अवधारणाओं को समझते हैं।
अपनी समझ की जाँच करें प्रश्न > (Google Doc / .docx / .pdf)
पाठ 2 पर जाने के लिएअगला > चुनें।