
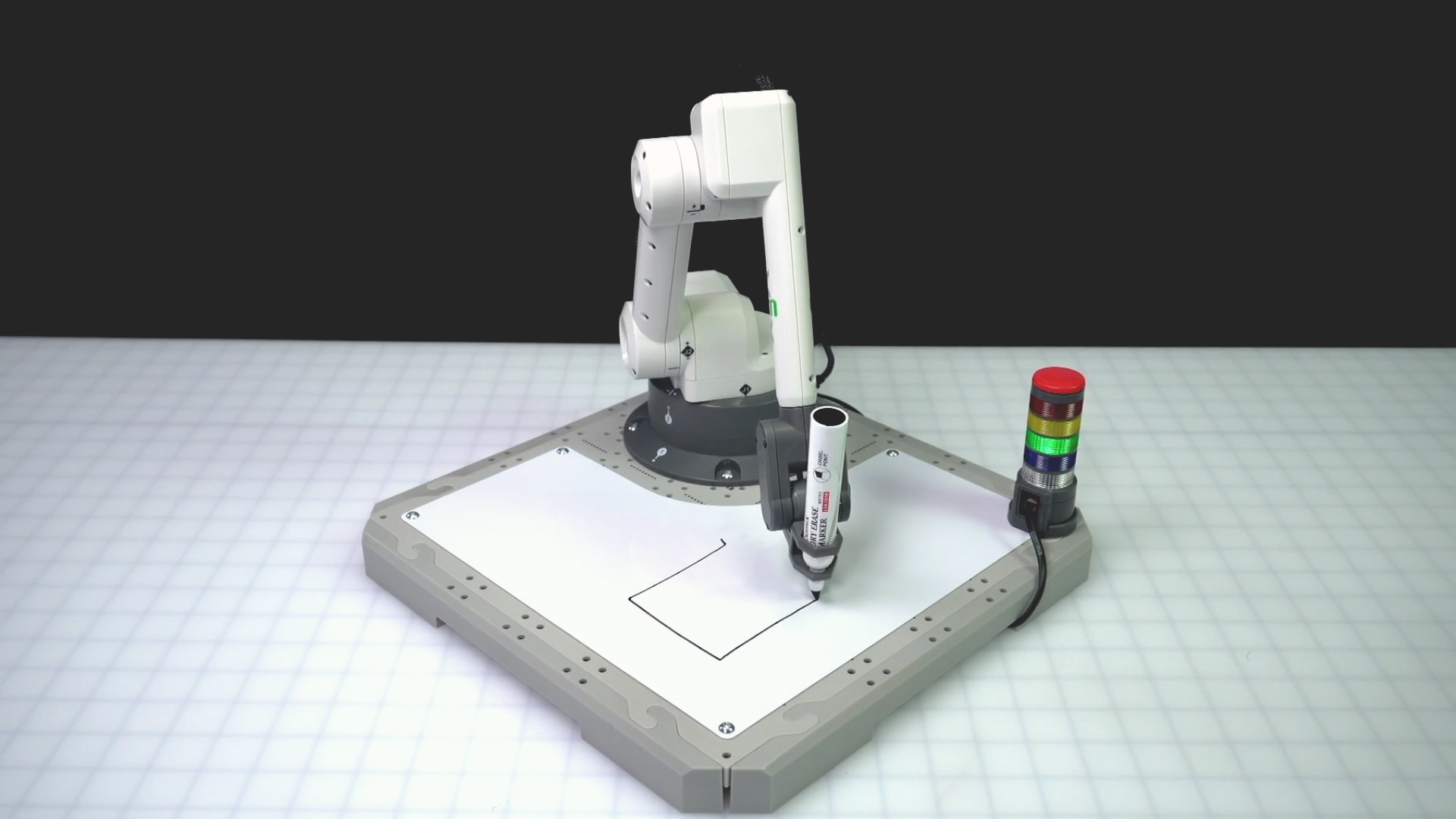
Zuvor haben Sie den 6-Achsen-Arm auf bestimmte Koordinaten verschoben, um verschiedene Formen zu zeichnen. In dieser Lektion lernen Sie eine andere Möglichkeit, den 6-Achsen-Arm zu bewegen, um ein Quadrat zu zeichnen. Sie werden in die Konzepte der absoluten und relativen Bewegung eingeführt, so dass Sie die beiden Bewegungsarten kombinieren können, um den 6-Achsen-Arm zu kodieren.
In dieser Lektion lernen Sie:
- Der Unterschied zwischen absoluter und relativer Bewegung.
- Wann eine absolute oder relative Bewegung in einem Projekt angewendet werden muss, um den 6-Achsen-Arm wie beabsichtigt zu bewegen.
- So verwenden Sie Inkrement-Positionsblöcke in einem Projekt, um relative Bewegungen zu codieren.
Am Ende dieser Lektion werden Sie den 6-Achsen-Arm codieren, um Quadrate zu zeichnen, indem Sie eine Kombination aus absoluten und relativen Bewegungen verwenden.
Zeichnen eines Quadrats mit absoluter Bewegung
In der vorherigen Einheit hast du ein Quadrat gezeichnet, indem du die Koordinaten jedes Punktes gefunden und den 6-Achsen-Arm an diese bestimmten Orte bewegt hast. Sehen wir uns diesen Prozess noch einmal an, damit wir auf die Art der Bewegung achten können, die der 6-Achsen-Arm verwendet.
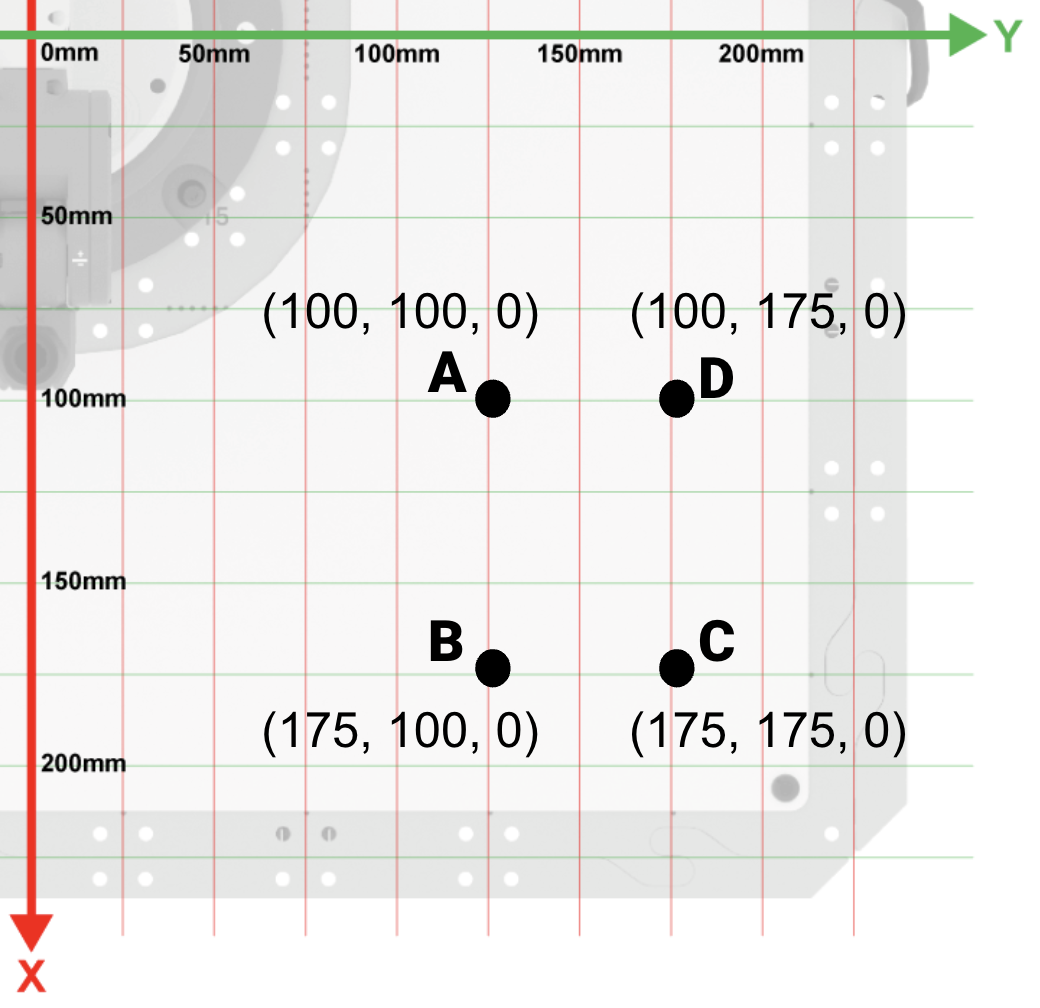
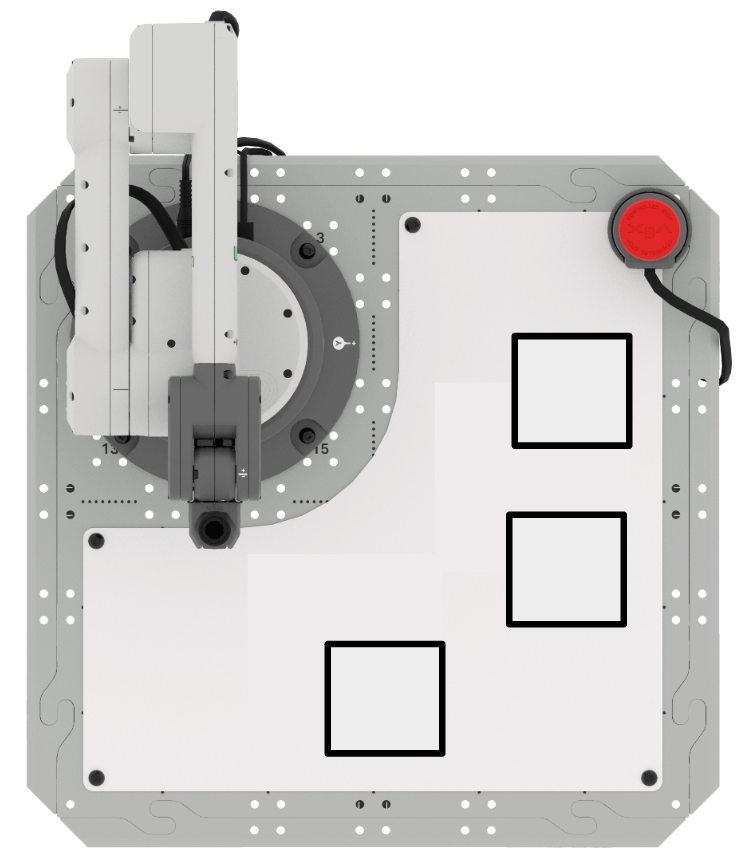
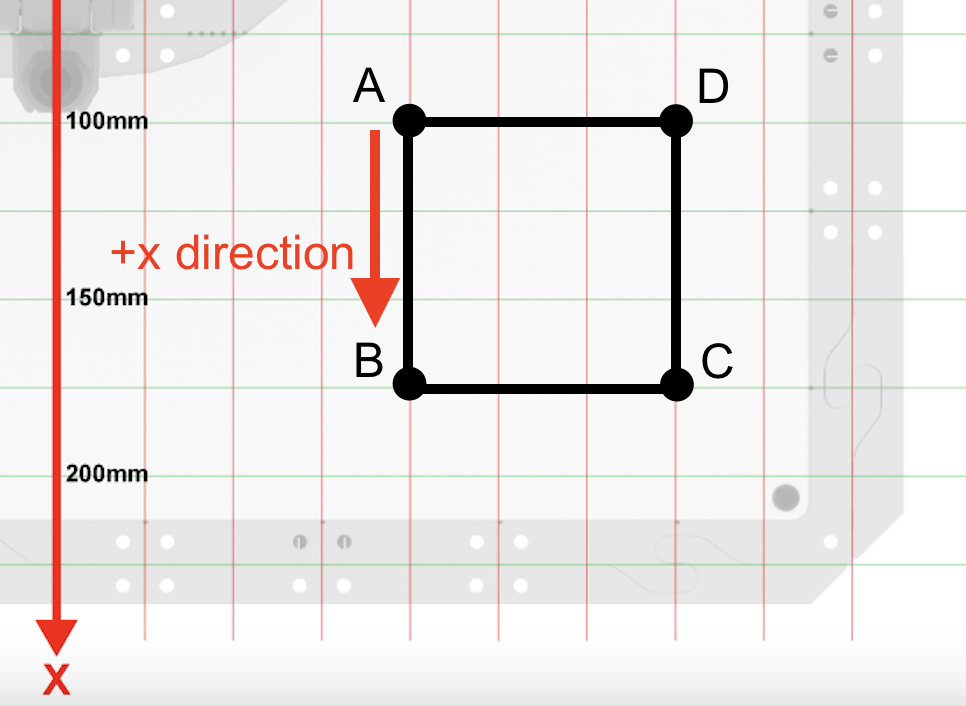
Dokumentieren Sie die Koordinaten des quadratischen ABCD.
Notieren Sie in Ihrem technischen Notizbuch die bekannten Informationen über den Platz.
- Jede Seitenlänge beträgt 75 mm
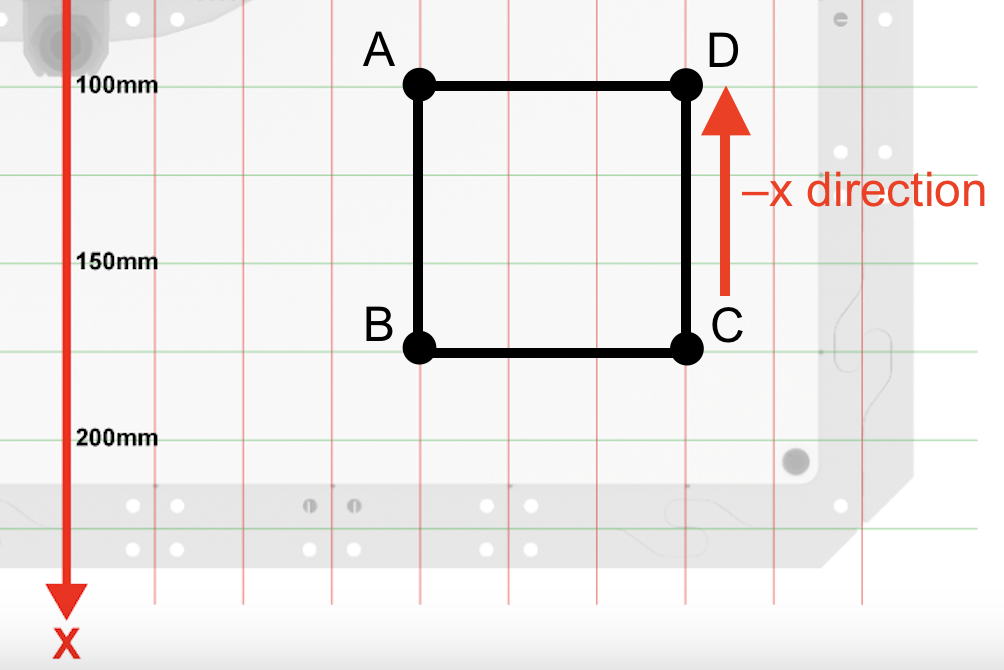
- Punkt A ist (100, 100, 0)
- Punkt B ist (175, 100, 0)
- Punkt C ist (175, 175, 0)
- Punkt D ist (100, 175, 0)
Öffnen Sie ein neues Blockprojekt, indem Sie den Schritten in diesem Video folgen.
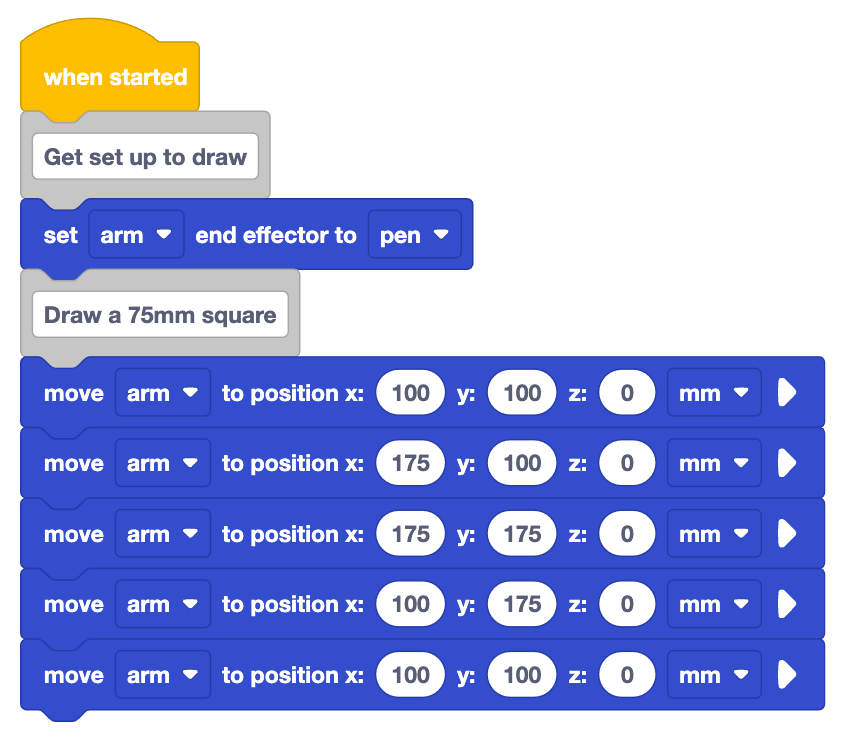
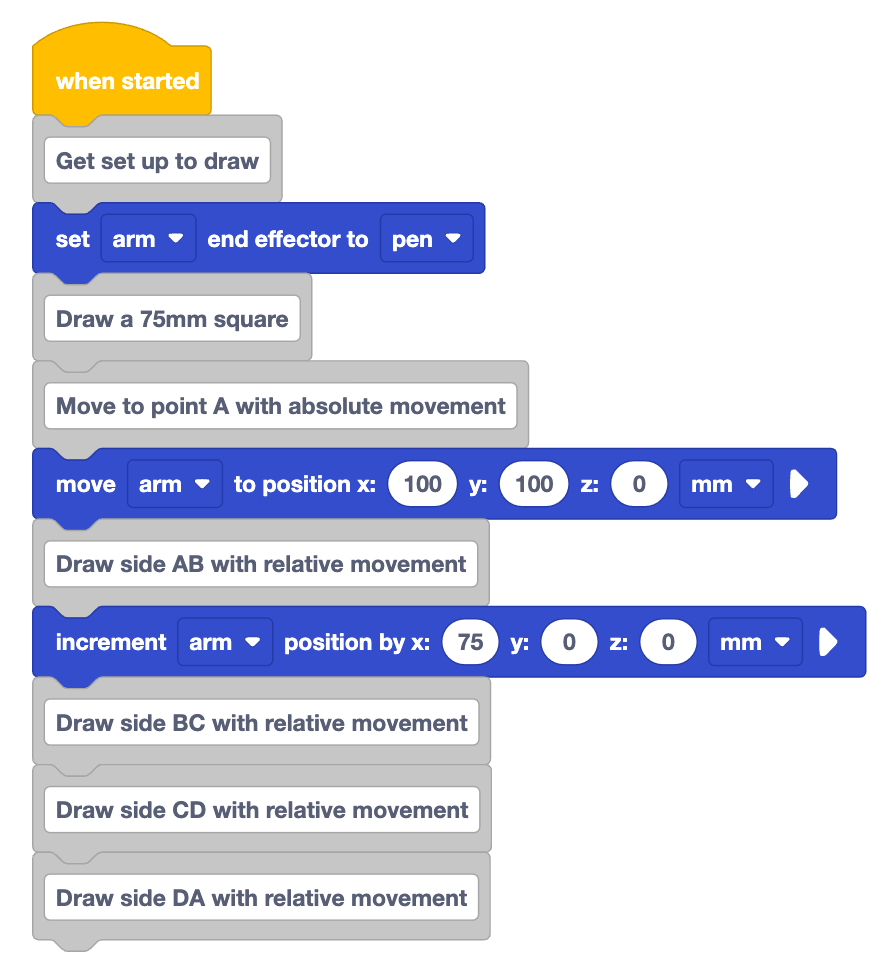
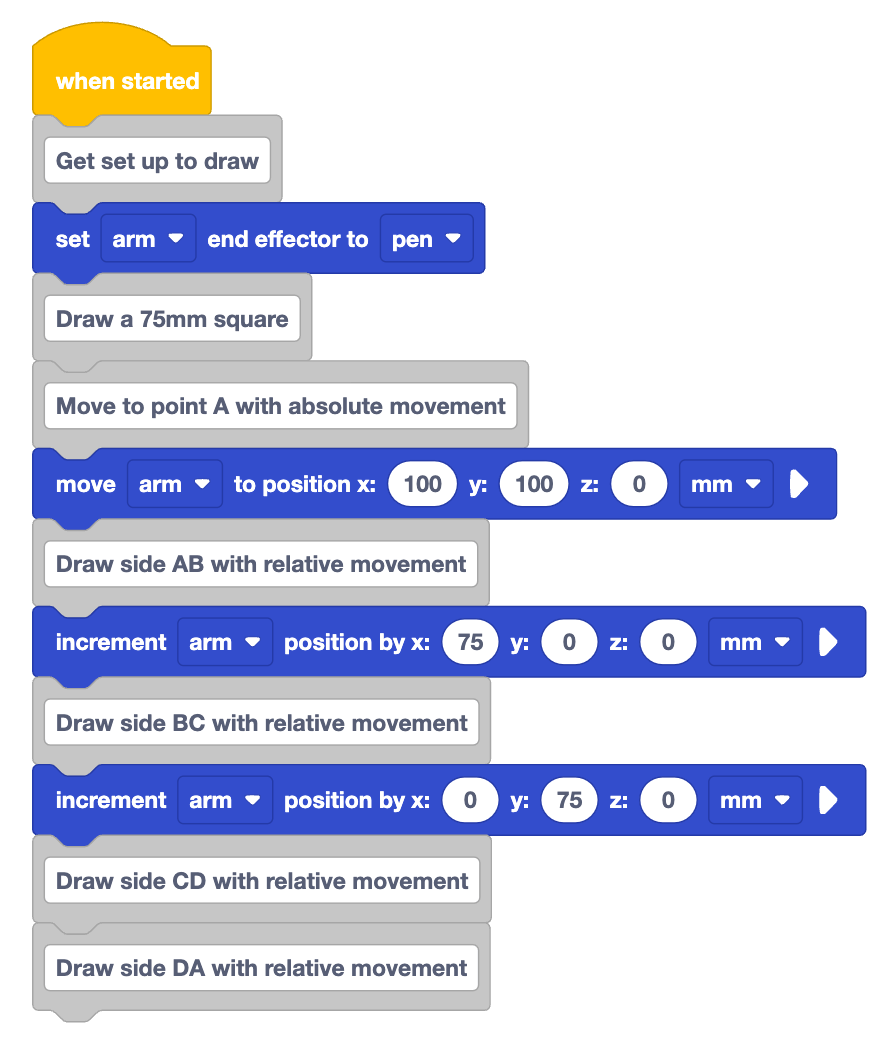
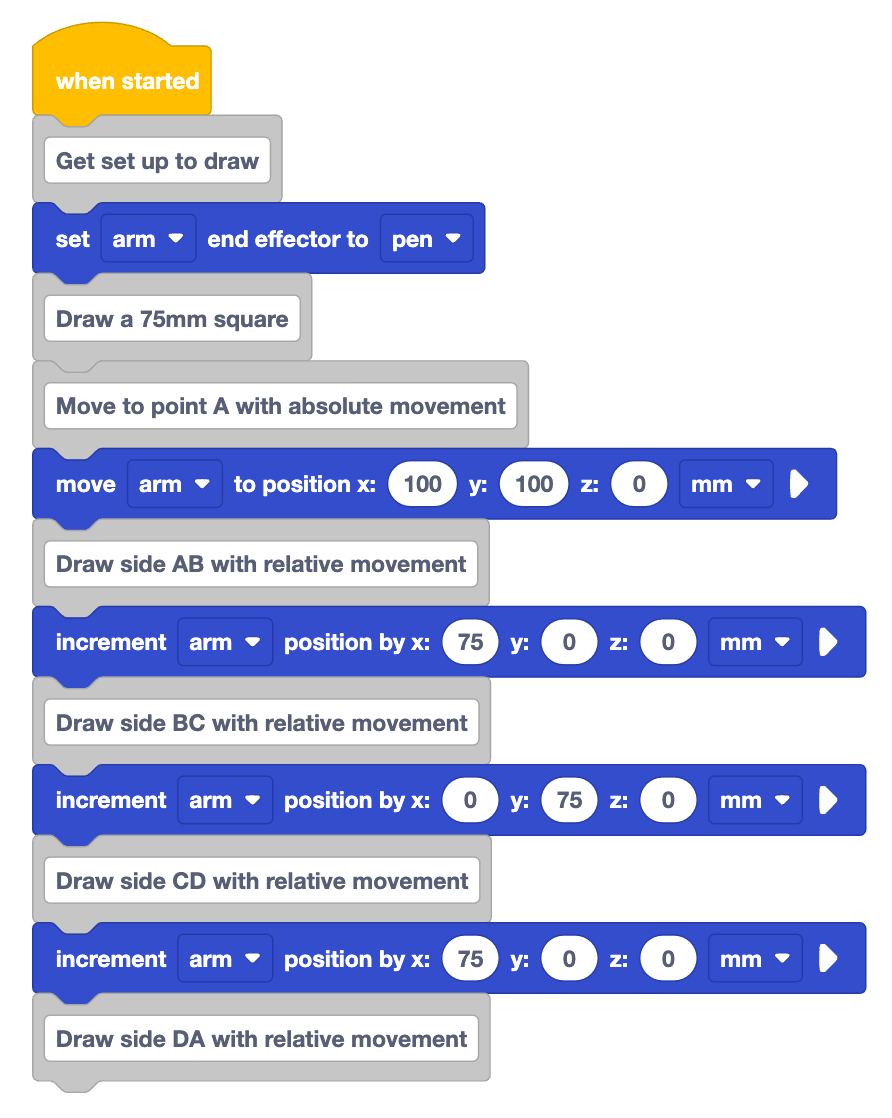
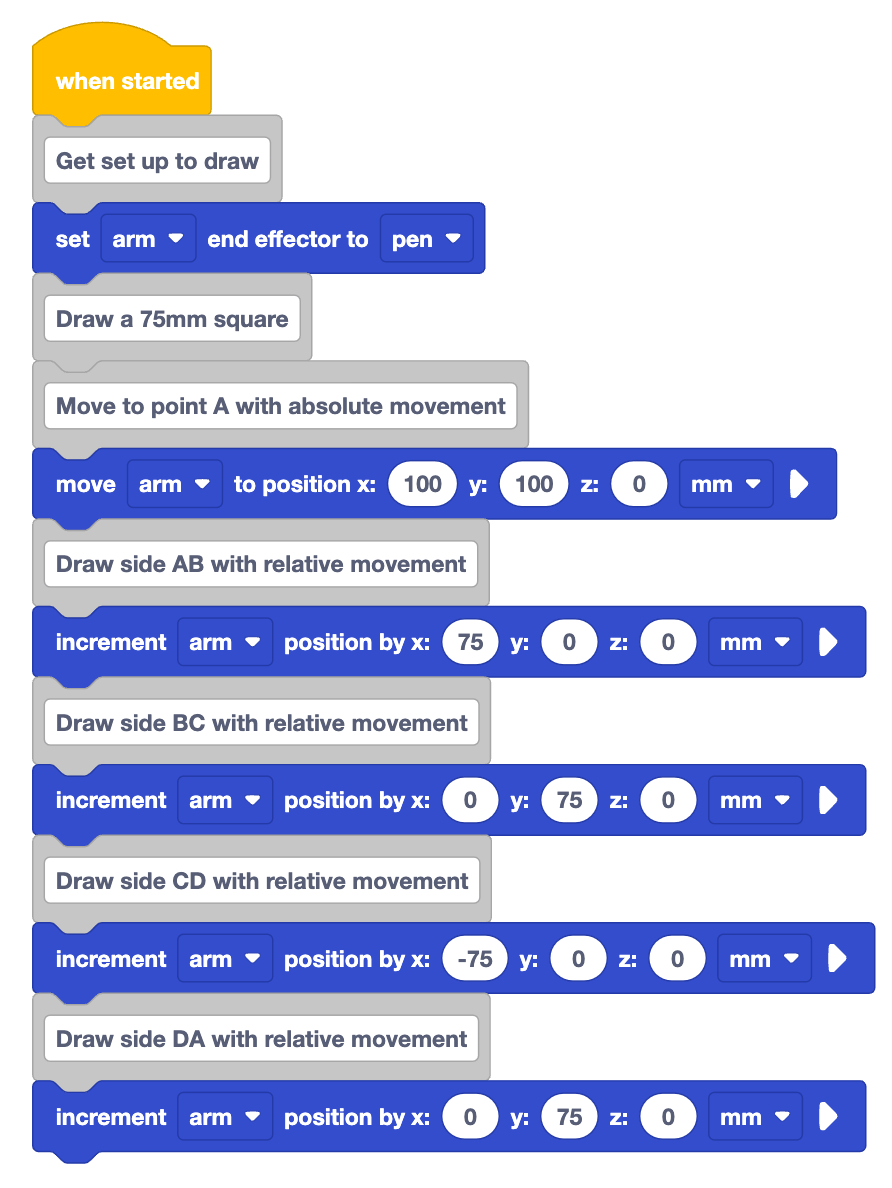
Erstellen Sie das hier in VEXcode gezeigte Projekt neu.

Schauen Sie sich die Blöcke im Projekt an. Was wird der 6-Achsen-Arm Ihrer Meinung nach tun, wenn dieses Projekt ausgeführt wird?
Notieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch. Beschreiben Sie, wie sich der 6-Achsen-Arm in Worten bewegt, und skizzieren Sie, was Ihrer Meinung nach auf dem Whiteboard gezeichnet wird.
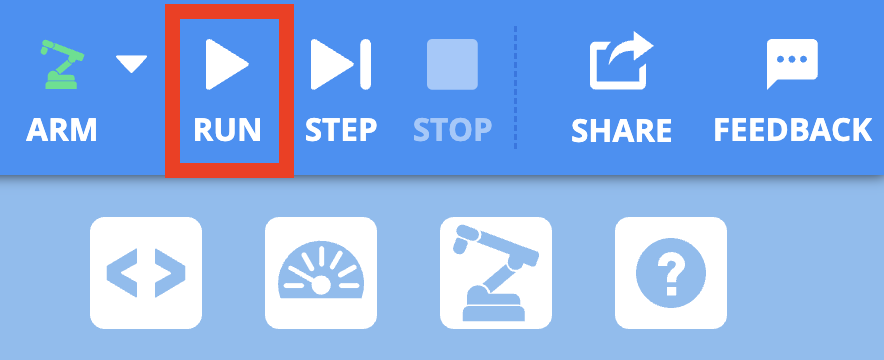
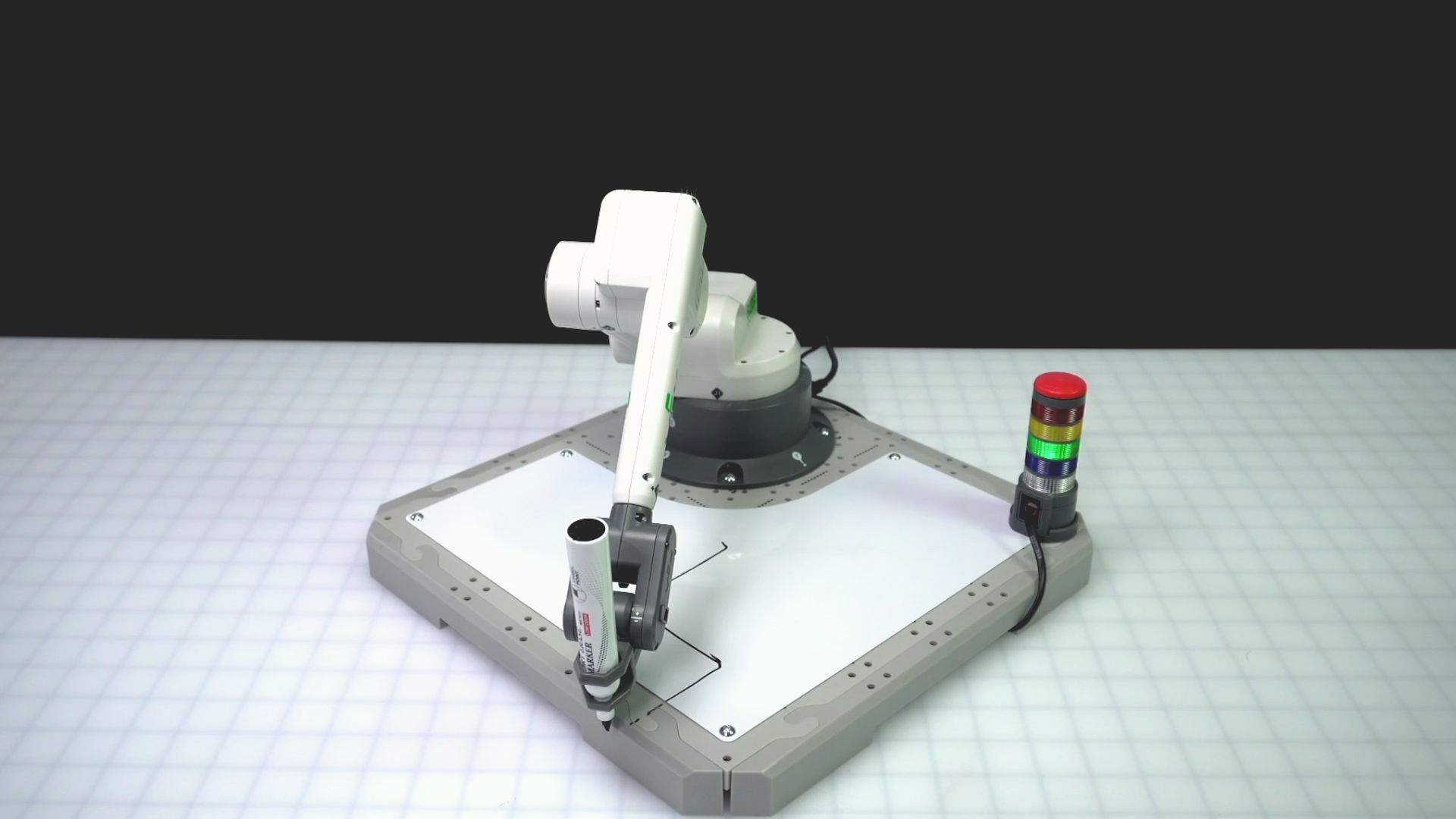
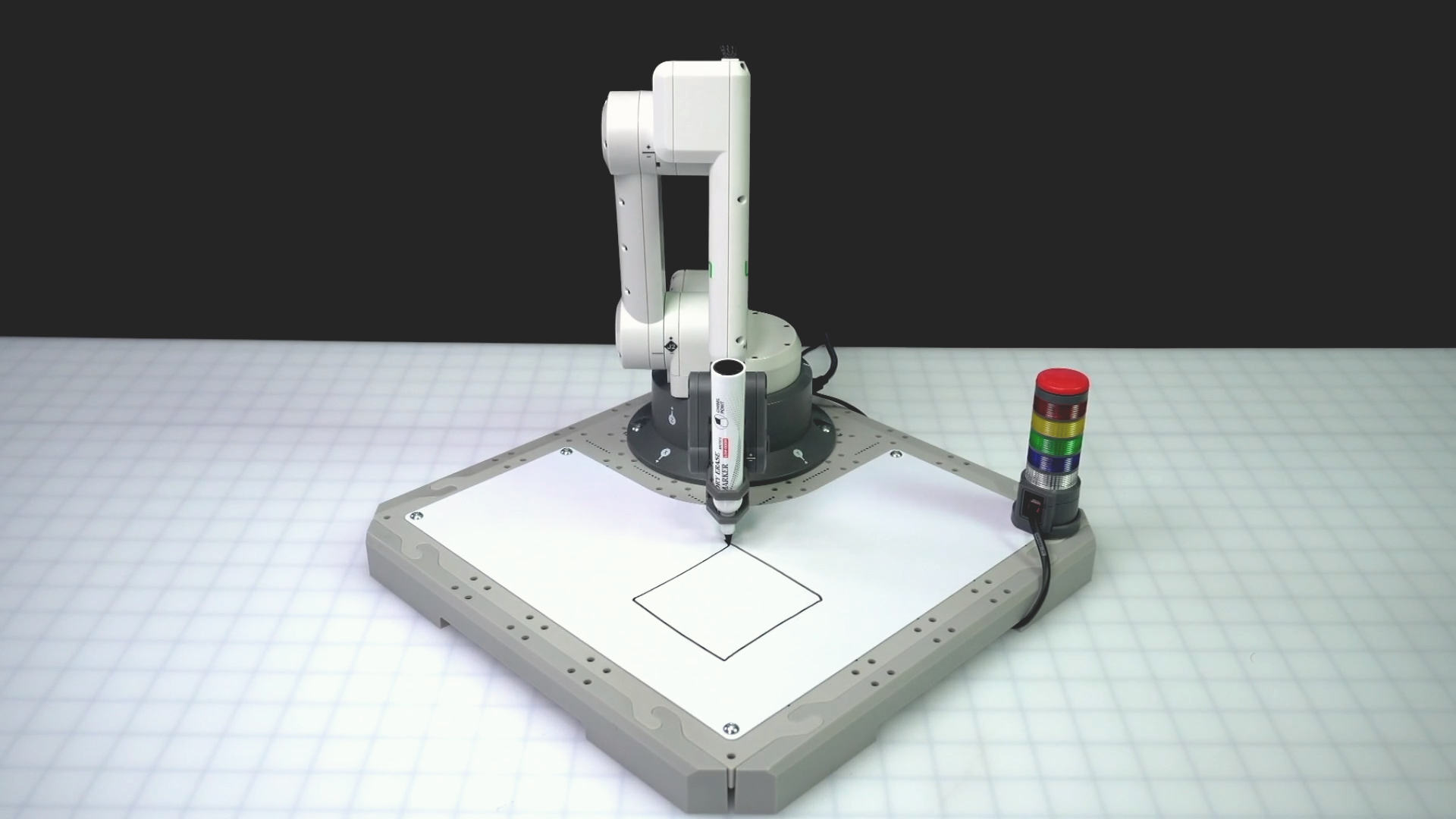
Stellen Sie sicher, dass der 6-Achsen-Arm mit dem VEXcode verbunden ist. Führen Sie das Projekt aus und beobachten Sie das Verhalten des 6-Achsen-Arms.
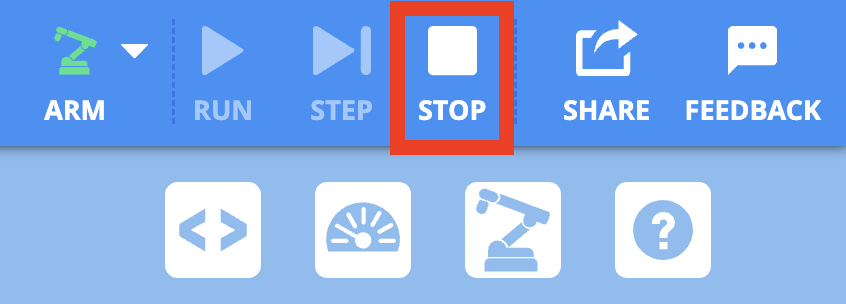
Stoppen Sie das Projekt, wenn der 6-Achsen-Arm seine Bewegung beendet hat.
Hat der 6-Achsen-Arm das gezeichnet, was Sie vorhergesagt haben? Warum oder warum nicht?
In diesem Projekt verwendet der 6-Achsen-Arm absolute Bewegung, um das Quadrat zu zeichnen. Das bedeutet, dass sich der 6-Achsen-Arm zu bestimmten Koordinaten bewegt, um jede Seite des Quadrats zu zeichnen. Es erreicht die gleichen Koordinaten, unabhängig davon, wo der 6-Achsen-Arm zuvor positioniert wurde. Dies kann manchmal nützlich sein, erfordert aber, dass wir für jeden Punkt in der Form, die wir machen, genaue Koordinaten haben. Es gibt eine andere Möglichkeit, die Informationen über Seitenlängen in einem Projekt zu verwenden, um ein Quadrat zu zeichnen.
Zeichnen eines Quadrats mit relativer Bewegung
Wenn wir die Längen der Seiten des Quadrats verstehen, können wir herausfinden, wie viel sich der 6-Achsen-Arm relativ zu seiner aktuellen Position bewegen muss, um jede Seite genau zu zeichnen. Anstatt alle vier Ecken des Quadrats zu lokalisieren, können wir den Arm einfach relativ zum Ausgangspunkt bewegen , um die Form zu vervollständigen.
Was ist Relativbewegung?
Die Relativbewegung bewegt den 6-Achsen-Arm basierend auf seiner aktuellen Position in eine neue Position. Mit einem Startpunkt und den Längen der Seiten des Quadrats können wir den 6-Achsen-Arm entlang der x- und y-Achse relativ zur Startposition bewegen. Lassen Sie uns das mit unserem 75-mm-Quadrat aufschlüsseln.
Wir beginnen mit einer absoluten Bewegung, um zur Startkoordinate zu gelangen. Von dort aus kann
jede der Seiten mit relativer Bewegung gezeichnet werden. 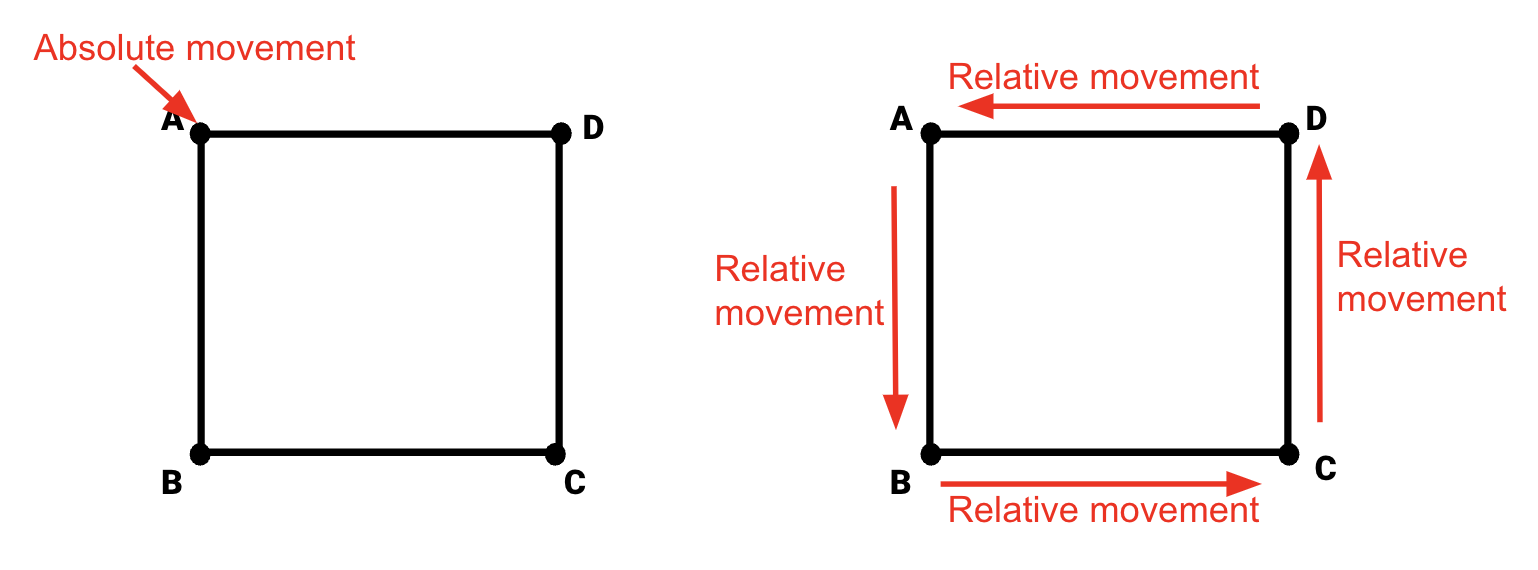
Lassen Sie uns unser Projekt bearbeiten, um dies in Aktion zu sehen.
Entfernen Sie die Position der Blöcke, die zum Zeichnen des Quadrats verwendet werden.
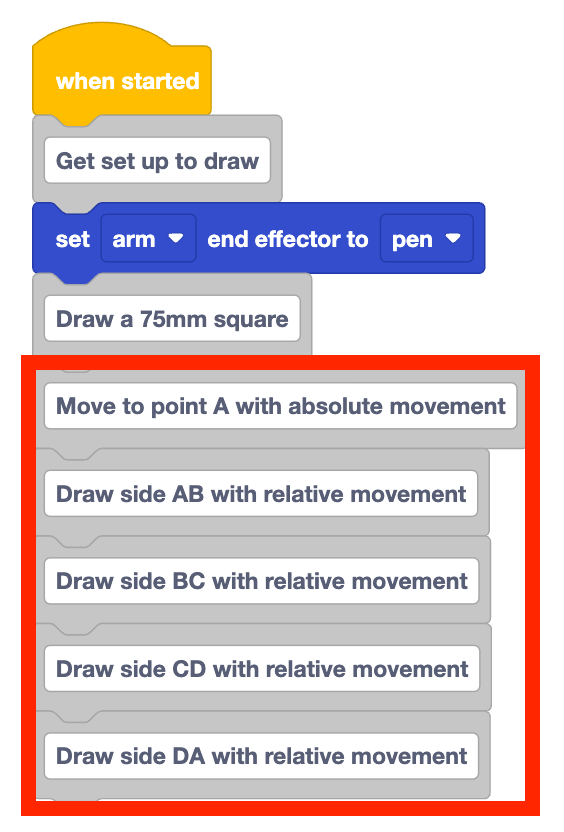
Fügen Sie dem Projekt fünf Kommentarblöcke hinzu, um die Bewegung des 6-Achsen-Arms zu beschreiben, um jede Seite des Quadrats zu zeichnen. Geben Sie die folgenden Kommentare in das Projekt ein:
- Mit absoluter Bewegung zu Punkt A fahren
- Seite AB mit Relativbewegung zeichnen
- Seite BC mit Relativbewegung zeichnen
- Seiten-CD mit Relativbewegung zeichnen
- Seite DA mit Relativbewegung zeichnen
Das Hinzufügen von Kommentaren wie diesem ist hilfreich, um organisiert zu bleiben und die Schritte zu zeigen, die nacheinander erforderlich sind, um die anstehende Aufgabe zu erledigen.
Zeichnungsseite AB mit relativer Bewegung

Fügen Sie unter dem Kommentar „ Bewegung zu Punkt A mit absoluter Bewegung“ einen Block Bewegung zu Position hinzu. Geben Sie die Startkoordinate (Punkt A) in die Parameter ein.
- Punkt A (100, 100, 0)
Dieses Projekt beginnt genauso wie das vorherige, da es mit einer absoluten Bewegung beginnt.
Um die Seite AB mit relativer Bewegung zu zeichnen, verwenden wir
einen Inkrementpositionsblock. 
Der Inkrement-Positionsblock bewegt den 6-Achsen-Arm um eine bestimmte Strecke entlang der x-, y-, z-Achsen. Dies ist der Block, den wir verwenden werden, um den 6-Achsen-Arm mit relativer Bewegung zu bewegen. Der Inkrement-Positionsblock bewegt den 6-Achsen-Arm um eine Entfernung relativ zu seiner aktuellen Position.
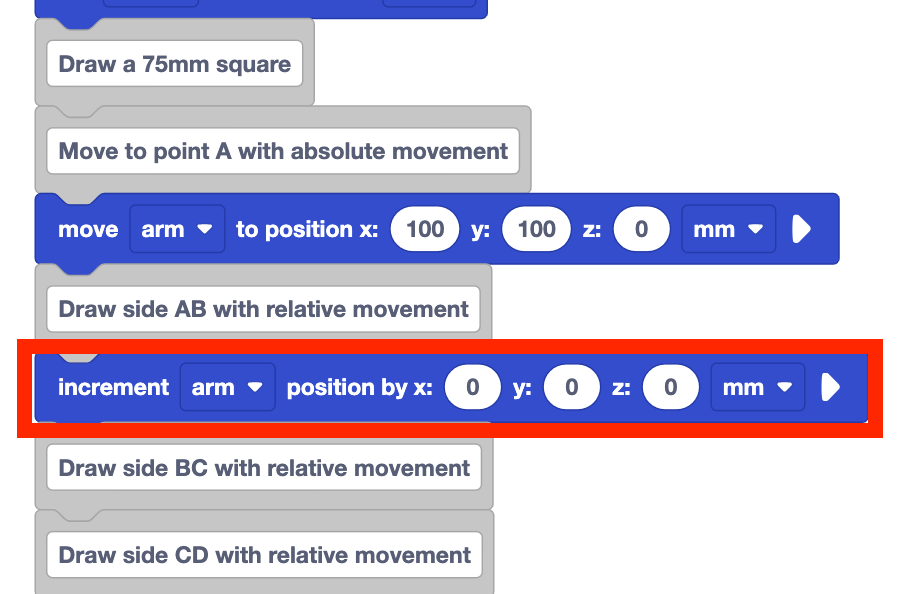
Fügen Sie einen Inkrement-Positionsblock unter dem Kommentar "Seite AB mit relativer Bewegung zeichnen" hinzu.
Beachten Sie, dass der Inkrement-Positionsblock Parameter für die x-, y- und z-Achse hat. Dies hängt davon ab , wie weit sich der 6-Achsen-Arm entlang jeder Achse bewegt, oder von der relativen Bewegung des 6-Achsen-Arms auf jeder Achse. Diese Parameter sind kein Koordinatenwert, wie sie es im Block Positionieren waren, als der 6-Achsen-Arm die absolute Bewegung verwendete.
Um die Parameter zu bestimmen, die zum Zeichnen einer Seite des Quadrats benötigt werden, werden zwei Informationen benötigt:
- die Entfernung, um den 6-Achsen-Arm relativ zur aktuellen Position zu bewegen
- die Achse (n), entlang derer sich der 6-Achsen-Arm bewegt
Um die Seite AB des Quadrats zu zeichnen, ist der Abstand, um den sich der 6-Achsen-Arm relativ zur aktuellen Position bewegt, die Seitenlänge oder 75 mm. Um sich von Punkt A zu Punkt B zu bewegen, bewegt sich der 6-Achsen-Arm entlang der x-Achse in positiver Richtung. Es bewegt sich nicht entlang der y- oder z-Achse.
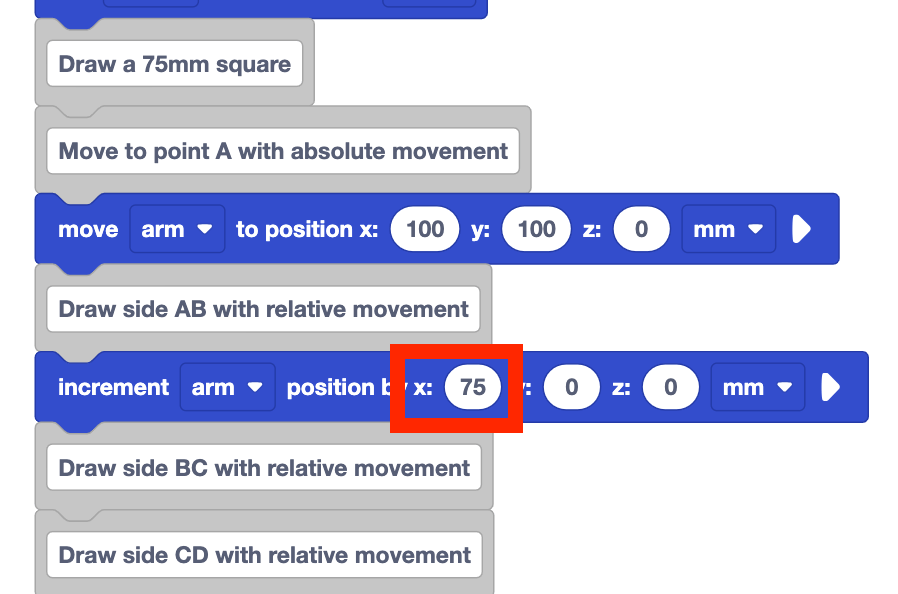
Stellen Sie den x-Parameter im Block Inkrementposition auf 75 ein. Die y- und z-Parameter bleiben 0.
Dadurch wird der 6-Achsen-Arm nur 75 mm entlang der x-Achse in die positive Richtung bewegt.
Sehen Sie sich das Projekt so an, wie es gerade ist. Was wird Ihrer Meinung nach dazu führen, dass der 6-Achsen-Arm läuft?
Notieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch. Zeichne, was deiner Meinung nach der 6-Achsen-Arm zeichnen wird.

Stellen Sie sicher, dass der 6-Achsen-Arm mit dem VEXcode verbunden ist. Führen Sie das Projekt aus und beobachten Sie das Verhalten des 6-Achsen-Arms.
Stoppen Sie das Projekt, wenn sich der 6-Achsen-Arm nicht mehr bewegt.
Hat sich der 6-Achsen-Arm wie vorhergesagt bewegt? Warum oder warum nicht?
Zeichnungsseite BC mit relativer Bewegung
Wir können das Gelernte anwenden, um die erste Seite des Quadrats zu zeichnen, um die Seite BC zu zeichnen.
Fügen Sie einen Inkrement-Positionsblock unter dem Kommentar "Seite BC mit relativer Bewegung zeichnen" hinzu.
Bestimmen Sie die Parameter des Blocks Inkrementposition.
Um die Seite BC zu zeichnen, muss sich der 6-Achsen-Arm um 75 mm bewegen. Wenn wir die Bewegungsrichtung relativ zur aktuellen Position betrachten, sehen wir, dass sich der 6-Achsen-Arm entlang der y-Achse bewegen muss. Der 6-Achsen-Arm sollte sich nicht entlang der x- oder z-Achse bewegen.
Setzen Sie den y-Parameter des Blocks Inkrementposition auf 75.
Dadurch wird der 6-Achsen-Arm um 75 mm entlang der y-Achse bewegt. Da die Parameter für die x- und z-Achse 0 sind, bewegt sich der 6-Achsen-Arm nicht auf der x- oder z-Achse.
Sagen Sie voraus, wie sich der 6-Achsen-Arm Ihrer Meinung nach bewegen wird, wenn das Projekt ausgeführt wird. Notieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch.
Skizzieren Sie, was der 6-Achsen-Arm Ihrer Meinung nach zeichnen wird.
Führen Sie das Projekt aus und beobachten Sie das Verhalten des 6-Achsen-Arms.
Stoppen Sie das Projekt, wenn der 6-Achsen-Arm seine Bewegung beendet hat.
Hat der 6-Achsen-Arm das gezeichnet, was Sie vorhergesagt haben? Warum oder warum nicht?
Zeichnungsseitige CD mit relativer Bewegung
Jetzt, da wir die ersten beiden Seiten des Quadrats gezeichnet haben, können wir unser Projekt weiter ausbauen, um die Seiten-CD zu zeichnen.
Fügen Sie einen Inkrement-Positionsblock unter dem Kommentar "Seiten-CD mit relativer Bewegung zeichnen" hinzu.
Bestimmen Sie die Parameter für den Block Inkrementposition.
Um die Seiten-CD zu zeichnen, beträgt die Seitenlänge immer noch 75 mm. Betrachtet man die Richtung dieser Bewegung relativ zur aktuellen Position des 6-Achsen-Arms, sehen wir, dass die Bewegung wieder entlang der x-Achse verläuft.
Der 6-Achsen-Arm sollte sich nicht auf der y- oder z-Achse auf dieser Seite des Quadrats bewegen.

Stellen Sie den x-Parameter des Blocks Inkrementposition auf 75 ein.
Sagen Sie voraus, wie sich der 6-Achsen-Arm Ihrer Meinung nach bewegen wird, wenn das Projekt ausgeführt wird. Notieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch und fügen Sie eine Skizze hinzu, was Ihrer Meinung nach gezeichnet wird.

Führen Sie das Projekt aus und beobachten Sie das Verhalten des 6-Achsen-Arms.
Hat es das gezeichnet, was Sie vorhergesagt haben? Warum oder warum nicht?
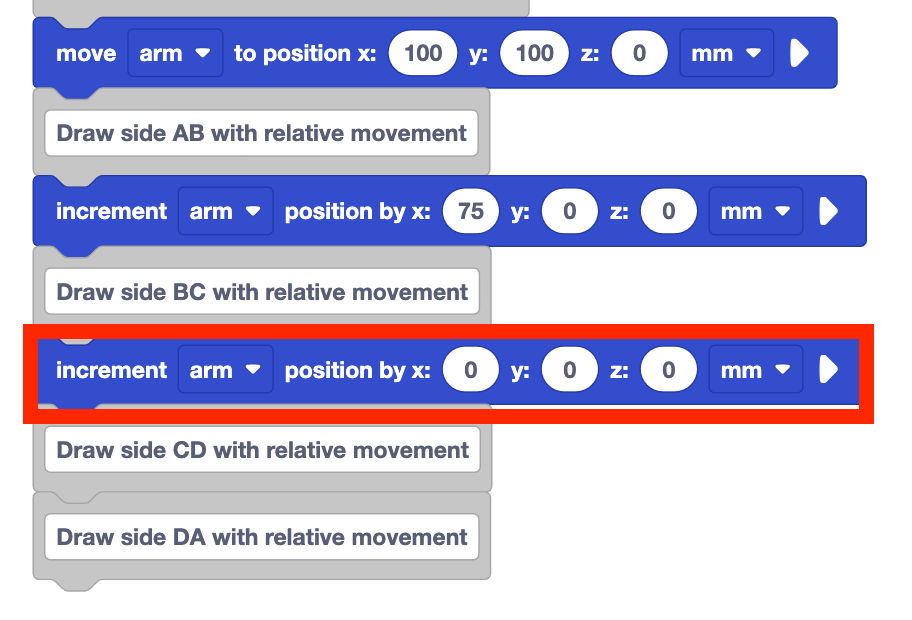
Der 6-Achsen-Arm hat die Seiten-CD nicht wie beabsichtigt gezogen.
Schauen wir uns an, warum das passiert ist. Die Seitenlänge hat sich nicht geändert, daher ist die Länge der gezeichneten Linie korrekt. Die Richtung dieser Bewegung ist es jedoch nicht.
Wir können die Bewegung in eine positive oder negative Richtung berücksichtigen, indem wir den Parameter im Inkrement-Positionsblock als positive oder negative Zahl eingeben.
Für die Seiten AB und BC bewegte sich der 6-Achsen-Arm in positiver Richtung entlang der x-
und y-Achse, daher haben wir eine positive Zahl verwendet. Aber um die Seiten-CD zu
zeichnen, muss sich der 6-Achsen-Arm in die negative Richtung
bewegen, also müssen wir einen negativen Wert im Parameter verwenden.
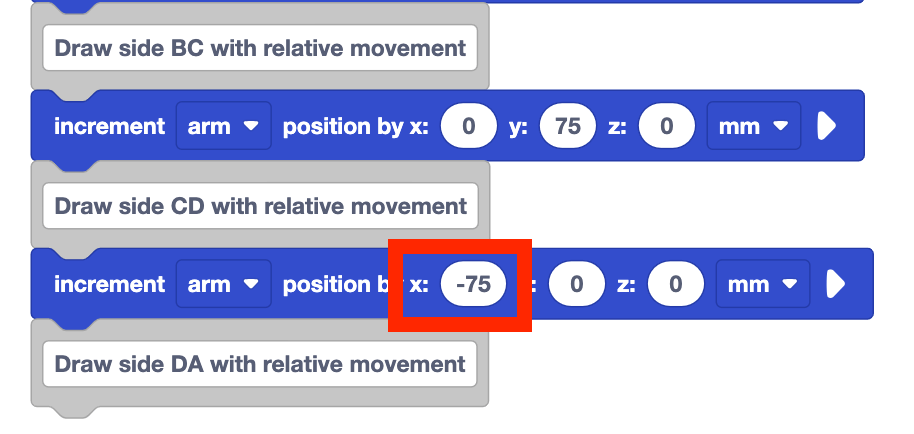
Stellen Sie den x-Parameter des Blocks Inkrementposition auf -75.
Dadurch wird der 6-Achsen-Arm um 75 mm in die negative Richtung entlang der x-Achse bewegt. Die y- und z-Achsenwerte müssen sich nicht ändern, da sich der 6-Achsen-Arm immer noch nicht entlang dieser Achsen bewegt, um die Seiten-CD zu zeichnen.
Führen Sie das Projekt erneut aus und beobachten Sie das Verhalten des 6-Achsen-Arms.
Wird die Seiten-CD wie vorgesehen gezeichnet? Warum oder warum nicht?
Zeichnungsseite DA mit relativer Bewegung
Jetzt, da wir drei Seiten des Quadrats gezeichnet haben, können wir das anwenden, was wir gelernt haben, um die letzte Seite zu zeichnen.
Fügen Sie einen Inkrement-Positionsblock unter dem Kommentar "Seite DA mit relativer Bewegung zeichnen" hinzu.

Bestimmen Sie die Parameter für den Block Inkrementposition.
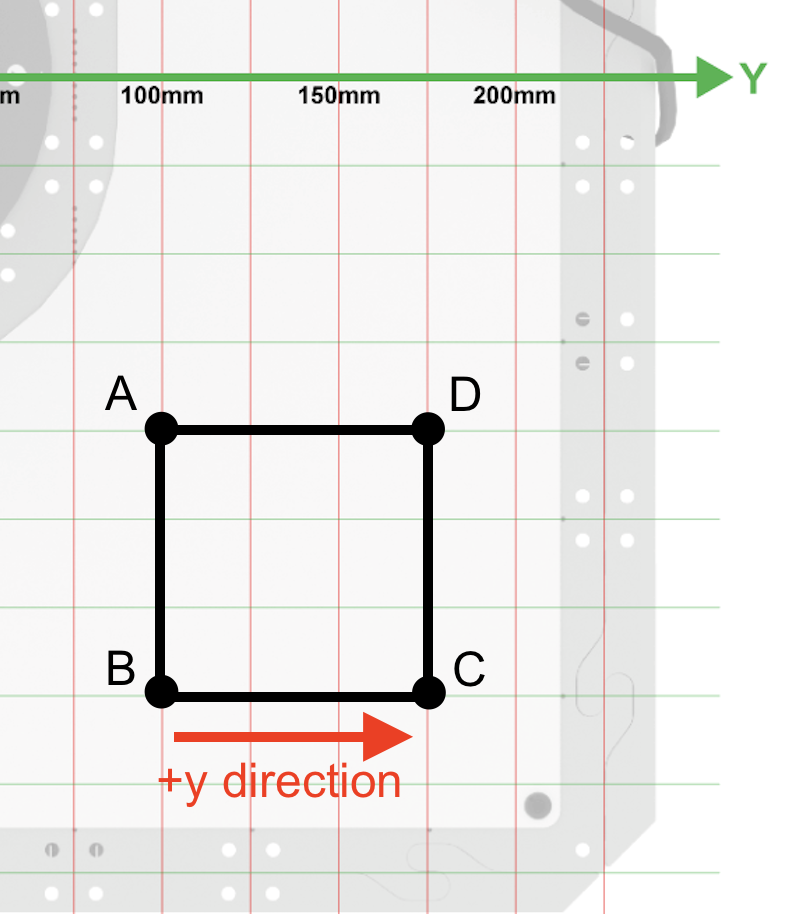
Um die Seite DA zu zeichnen, bewegt sich der 6-Achsen-Arm wieder um 75 mm. Wenn man sich die Richtung dieser Bewegung basierend auf der aktuellen Position ansieht, muss sich der 6-Achsen-Arm erneut entlang der y-Achse bewegen. Es muss sich nicht entlang der x- oder z-Achse bewegen, um die Seite DA zu zeichnen.
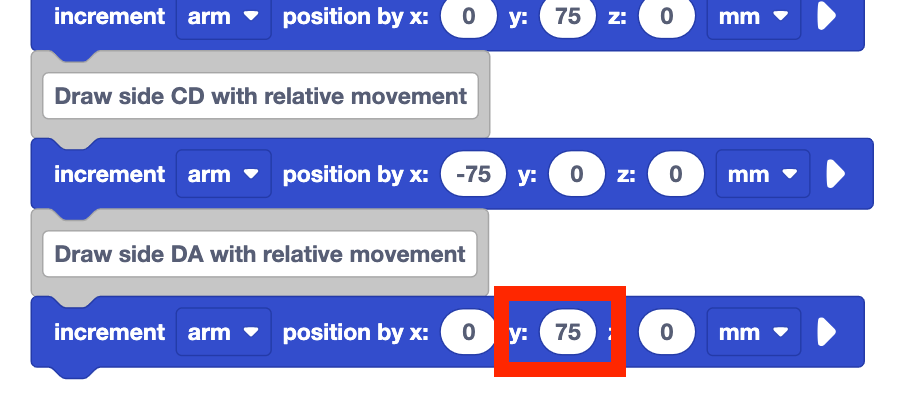
Stellen Sie den y-Parameter des Blocks Inkrementposition auf 75 ein. Die x- und z-Parameter sollen 0 bleiben.
Sagen Sie voraus, wie sich der 6-Achsen-Arm bewegen wird und was er zeichnen wird, wenn das Projekt ausgeführt wird. Notieren Sie Ihre Vorhersage in Ihrem technischen Notizbuch.

Führen Sie das Projekt aus und beobachten Sie das Verhalten des 6-Achsen-Arms.
Bewegt es sich so, wie Sie es vorhergesagt haben? Zeichnet es die letzte Seite des Quadrats wie beabsichtigt? Warum oder warum nicht?
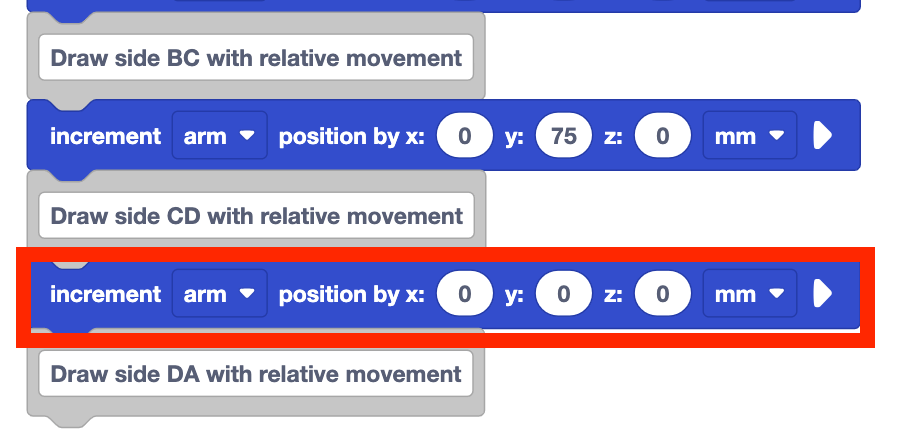
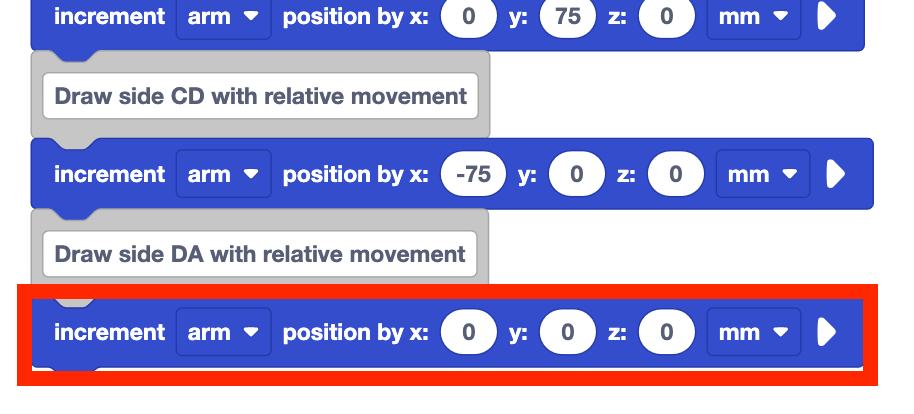
Um die Seite DA wie beabsichtigt zu zeichnen, musste sich der 6-Achsen-Arm in die negative Richtung entlang der y-Achse bewegen. Wir haben jedoch den y-Parameter auf 75 mm eingestellt, was darauf hinweist, dass sich der 6-Achsen-Arm in positiver Richtung entlang der y-Achse bewegen sollte.

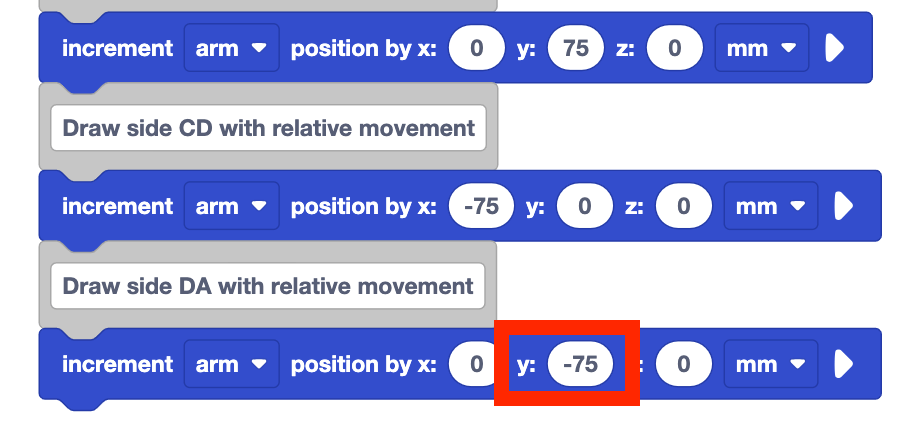
Setzen Sie den y-Parameter des letzten Inkrementpositionsblocks auf -75. Die Parameter x und z sollten 0 bleiben, da sich der 6-Achsen-Arm nicht auf diesen Achsen bewegen muss, um die Seite DA wie beabsichtigt zu zeichnen.
Der 6-Achsen-Arm sollte sich nun entlang der y-Achse in die negative Richtung bewegen, um das Quadrat zu vervollständigen.
Führen Sie das Projekt aus und beobachten Sie die Bewegung des 6-Achsen-Arms.
Zeichnet es das Quadrat wie beabsichtigt? Warum oder warum nicht?

Achten Sie darauf, Ihr Projekt umzubenennen und zu speichern.
Warum relative Bewegung verwenden?
Während die Bewegung des 6-Achsen-Arms die gleiche ist, um ein 75-mm-Quadrat mit absoluter und relativer Bewegung zu zeichnen, gibt es zusätzliche Flexibilität und Leichtigkeit, wenn wir die relative Bewegung verwenden. Wenn Sie zum Beispiel ein 75-mm-Quadrat an einer anderen Stelle zeichnen möchten, was würden Sie tun? Mit absoluter Bewegung würden Sie die neuen Koordinaten aller vier Punkte finden und den 6-Achsen-Arm codieren, um sie zu verbinden. Bei der relativen Bewegung müssen Sie jedoch nur die Startkoordinate kennen, und der Rest bleibt gleich.
Absolute Bewegung bringt Sie immer an die gleiche Koordinate, unabhängig vom Startort. Dies ist nützlich, wenn Sie den 6-Achsen-Arm an einen bestimmten Ort bewegen müssen, um ein Projekt zu starten, oder um sicherzustellen, dass Sie diesen Ort unabhängig von den vorherigen Koordinaten erreichen können.
Die relative Bewegung wird basierend auf der aktuellen Position an einen neuen Ort verschoben. Dies ist nützlich, wenn Sie den 6-Achsen-Arm in Bezug auf eine bekannte Position bewegen müssen, wie Sie es beim Zeichnen eines Quadrats getan haben, oder um sich in einem bestimmten Muster zu bewegen.
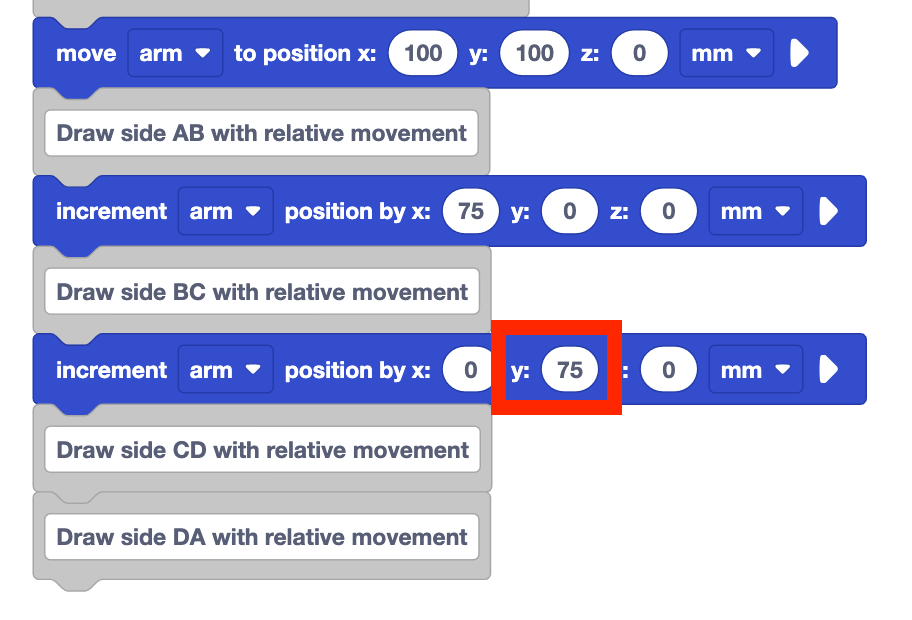
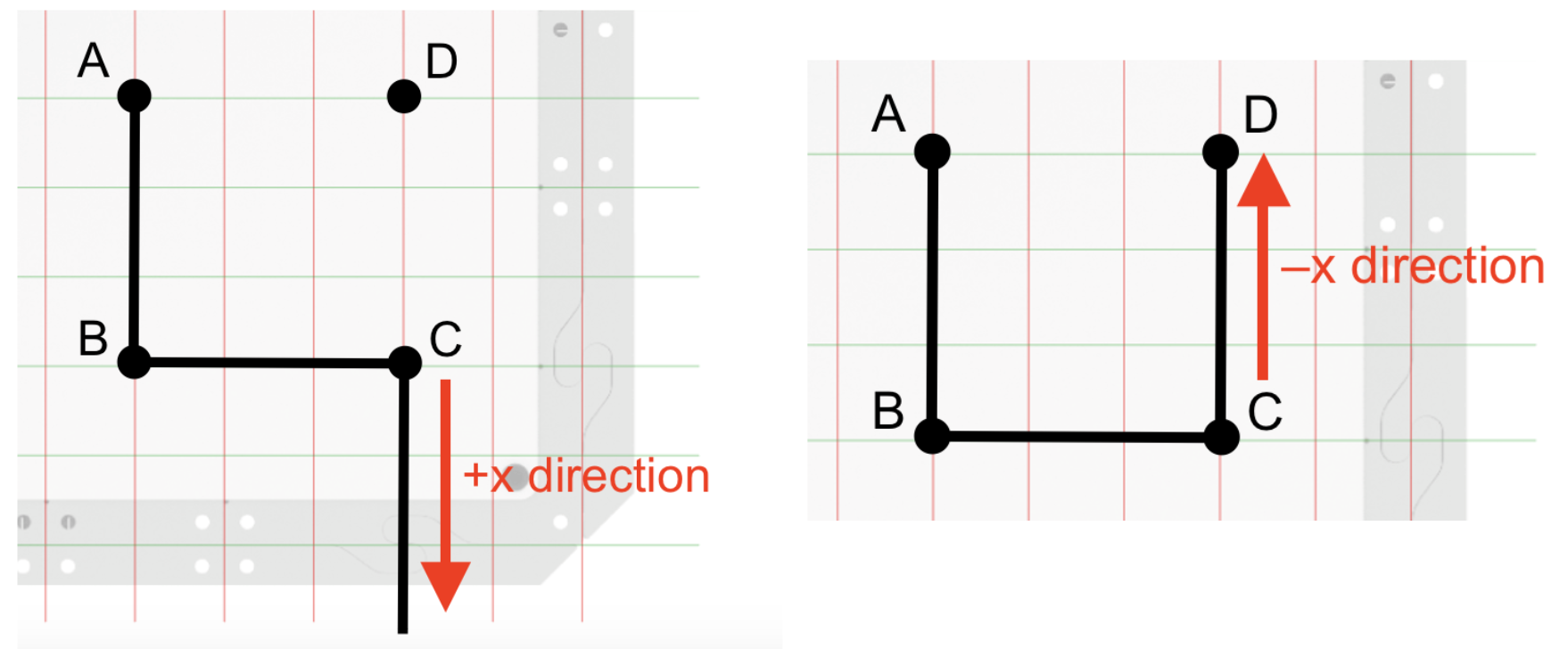
Beide Projekte in dieser Lektion verwendeten die gleichen Informationen, aber die Art und Weise, wie sie im Code verwendet wurden, war anders. Schauen wir uns unsere Projekte genauer an. Das Bild links stammt aus unserem absoluten Bewegungsprojekt. Die Seitenlänge von 75 mm entspricht der Änderung der x-Koordinate, die erforderlich ist, um von Punkt A zu Punkt B zu gelangen.
Das Bild rechts stammt aus unserem relativen Bewegungsprojekt. Hier entspricht die
Seitenlänge von 75mm, wie weit sich der 6-Achsen-Arm entlang der x-Achse bewegt. 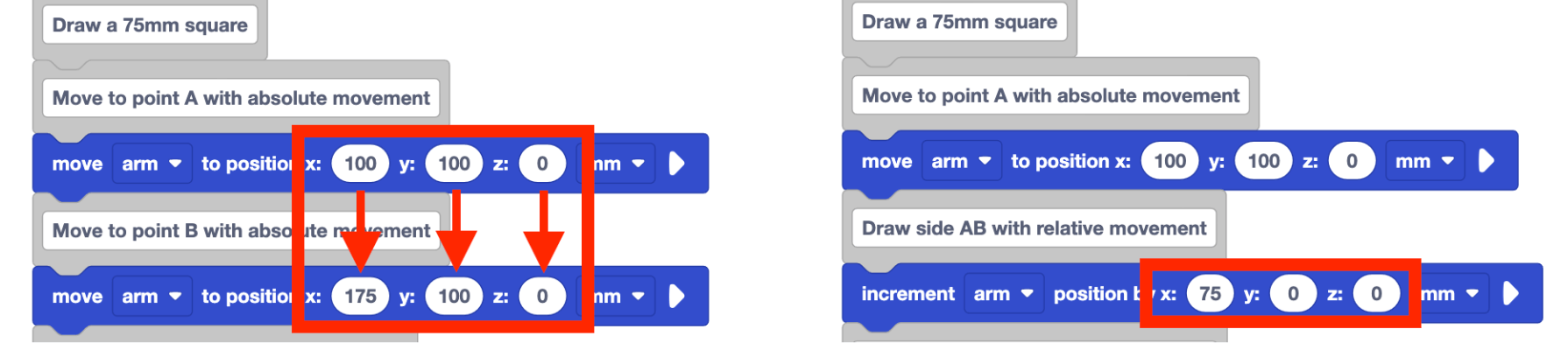
Die Verwendung von relativer Bewegung kann Ihnen zusätzliche Flexibilität in Ihrem Projekt geben, also machen Sie die Anpassung und Anpassung Ihres Codes für verschiedene Zwecke einfacher.
Aktivität
Nachdem Sie den 6-Achsen-Arm so codiert haben, dass er sich sowohl mit absoluter als auch mit
relativer Bewegung bewegt, ist es an der Zeit, diese Fähigkeiten zu üben. In dieser
Aktivität bearbeiten Sie Ihr Projekt, um den 6-Achsen-Arm zu codieren und drei Quadrate auf
dem Whiteboard zu zeichnen. 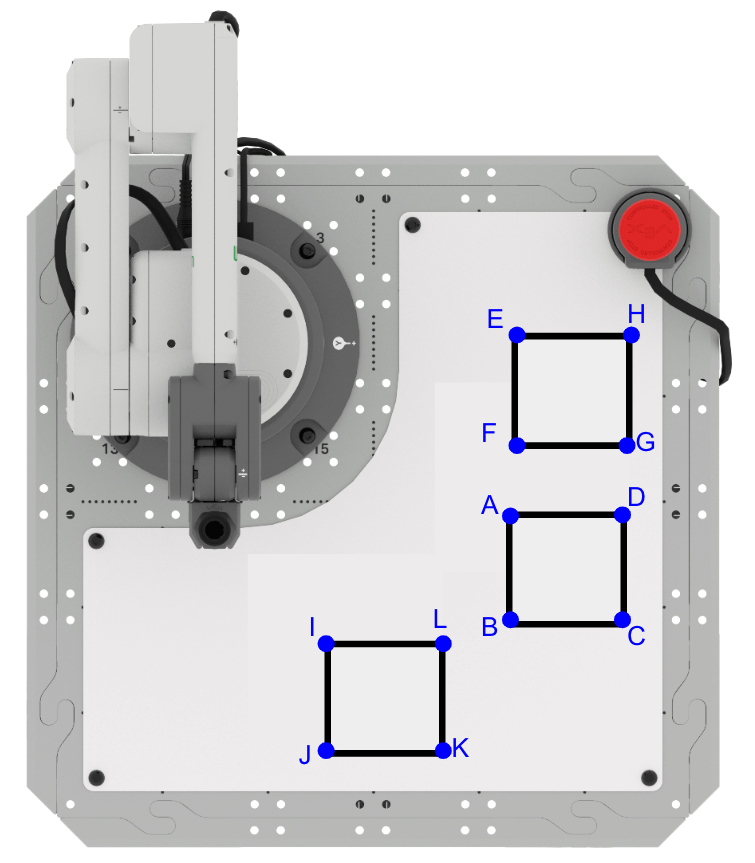
Setup: Notieren Sie die folgenden Informationen in Ihrem technischen Notizbuch.
- Die Startkoordinaten für jedes Quadrat sind wie folgt:
- Quadrat ABCD (100, 150, 0)
- Quadrat EFGH (-5, 153, 0)
- Quadrat IJKL (155, 57, 0)
- Alle Seitenlängen der drei Quadrate betragen 50 mm.
- Die Quadrate können sich nicht berühren.
Aktivität: Bauen Sie auf Ihrem Projekt aus dieser Lektion auf, um den 6-Achsen-Arm zu kodieren, um zwei zusätzliche Quadrate zu zeichnen.
- Notieren Sie einen Plan für Ihr Projekt in Ihrem technischen Notizbuch. Stellen Sie sicher, dass Ihre Gruppe sich darüber einig ist, welches Quadrat als erstes, zweites und drittes gezeichnet werden soll und welche Arten von Bewegungen Sie verwenden werden, um die Zeichnungen zu vervollständigen.
- Bauen Sie auf Ihrem Projekt aus dieser Lektion auf, um Ihrem Plan in Ihrem technischen Notizbuch zu folgen.
- Führen Sie Ihr Projekt aus, um es zu testen. Stellen Sie sicher, dass Ihr 6-Achsen-Arm mit VEXcode verbunden ist. Zeichnet Ihr Projekt alle drei Quadrate wie beabsichtigt? Warum oder warum nicht?
- Fahren Sie mit der Iteration Ihres Projekts fort, bis Sie alle drei Felder erfolgreich
gezeichnet haben. Benennen und speichern Sie Ihr Projekt, wenn Sie fertig sind.
Überprüfe dein Verständnis
Bevor Sie mit der nächsten Lektion beginnen, stellen Sie sicher, dass Sie die Konzepte in dieser Lektion verstehen, indem Sie die Fragen im folgenden Dokument in Ihrem technischen Notizbuch beantworten.
Fragen zum Verständnis prüfen > (Google Doc / .docx / .pdf)
Wählen Sie Weiter > , um mit Lektion 2 fortzufahren.