
Pelajaran 1: Gerak Relatif
Sebelumnya Anda memindahkan Lengan 6-Sumbu ke koordinat tertentu untuk menggambar berbagai bentuk. Dalam Pelajaran ini, Anda akan mempelajari cara lain untuk menggerakkan Lengan 6-Sumbu untuk menggambar persegi. Anda akan diperkenalkan dengan konsep gerak absolut dan relatif, sehingga Anda dapat menggabungkan kedua jenis gerak tersebut untuk mengkode Lengan 6-Sumbu.
Dalam Pelajaran ini Anda akan belajar:
- Perbedaan antara gerak absolut dan gerak relatif.
- Kapan harus menerapkan gerakan absolut atau relatif dalam suatu proyek untuk menggerakkan Lengan 6-Sumbu sebagaimana dimaksud.
- Cara menggunakan blok Increment position dalam sebuah proyek untuk mengkodekan pergerakan relatif.
Pada akhir Pelajaran ini Anda akan membuat kode Lengan 6-Sumbu untuk menggambar persegi, menggunakan kombinasi gerakan absolut dan relatif.

Menggambar Persegi dengan Gerakan Absolut
Pada Unit sebelumnya, Anda menggambar persegi dengan mencari koordinat setiap titik, dan menggerakkan Lengan 6-Sumbu ke lokasi spesifik tersebut. Mari kita tinjau proses ini, sehingga kita dapat memperhatikan jenis gerakan yang digunakan Lengan 6-Sumbu.
Dokumentasikan koordinat persegi ABCD.
Di buku catatan teknik Anda, catat informasi yang diketahui tentang persegi tersebut.
- Panjang setiap sisinya 75mm
- Titik A adalah (100, 100, 0)
- Titik B adalah (175, 100, 0)
- Titik C adalah (175, 175, 0)
- Titik D adalah (100, 175, 0)

Buka Proyek Blok Baru dengan mengikuti langkah-langkah dalam video ini.
Pilih opsi File di Toolbar untuk membuka menu File, lalu pilih Proyek Blok Baru. Sebuah jendela pop-up akan muncul dengan pilihan untuk EXP Brain atau 6-Axis Arm. Pilih Lengan 6-Sumbu. Proyek baru kemudian dibuka.
Buat ulang proyek yang ditunjukkan di sini dalam VEXcode.

Lihatlah blok-blok dalam proyek tersebut. Menurut Anda apa fungsi Lengan 6-Sumbu saat proyek ini dijalankan?
Catat prediksi Anda di buku catatan teknik Anda. Jelaskan dengan kata-kata bagaimana Lengan 6-Sumbu akan bergerak, dan buat sketsa apa yang menurut Anda akan digambar di Papan Tulis.

Pastikan Lengan 6-Sumbu terhubung ke VEXcode. Jalankan proyek dan amati perilaku Lengan 6-Sumbu.
Hentikan proyek ketika Lengan 6-Sumbu selesai bergerak.
Apakah Lengan 6-Sumbu menggambar apa yang Anda prediksi? Mengapa atau mengapa tidak?
Dalam proyek ini, Lengan 6-Sumbu menggunakan gerakan absolut untuk menggambar persegi. Artinya, Lengan 6-Sumbu bergerak ke koordinat tertentu untuk menggambar setiap sisi persegi. Ia akan mencapai koordinat yang sama di mana pun Lengan 6-Sumbu diposisikan sebelumnya. Hal ini terkadang berguna, tetapi mengharuskan kita memiliki koordinat yang tepat untuk setiap titik dalam bentuk yang kita buat. Ada cara lain untuk menggunakan informasi tentang panjang sisi dalam suatu proyek untuk menggambar persegi.
Menggambar Persegi dengan Gerakan Relatif
Memahami panjang sisi persegi membantu kita mengetahui seberapa banyak Lengan 6-Sumbu perlu bergerak relatifterhadap posisi saat ini untuk menggambar setiap sisi secara akurat. Alih-alih menentukan keempat sudut persegi, kita cukup menggerakkan lengan relatifterhadap titik awal untuk melengkapi bentuknya.
Apa itu gerak relatif?
Gerakan relatif menggerakkan Lengan 6-Sumbu ke posisi baru berdasarkan lokasi saat ini. Diberikan titik awal, dan panjang sisi persegi, kita dapat menggerakkan Lengan 6-Sumbu sepanjang sumbu x dan yrelatifterhadap posisi awal. Mari kita uraikan ini dengan persegi 75mm kita.
Kita akan mulai dengan gerakan absolut untuk mencapai koordinat awal. Dari sana, masing-masing sisi dapat digambar dengan gerakan relatif. 
Mari edit proyek kita untuk melihatnya dalam tindakan.
Hapus blok Pindahkan ke posisi yang digunakan untuk menggambar persegi.
Video di sini menunjukkan lima blok terbawah dari proyek yang dijalankan sebelumnya dihapus. Blok yang tersisa adalah dua komentar dan blok Set end effector.
Tambahkan lima blok Komentar ke proyek, untuk mendeskripsikan pergerakan Lengan 6-Sumbu untuk menggambar setiap sisi persegi. Ketik komentar berikut ke dalam proyek:
- Bergerak ke titik A dengan gerakan absolut
- Gambarlah sisi AB dengan gerakan relatif
- Gambarlah sisi BC dengan gerakan relatif
- Gambar sisi CD dengan gerakan relatif
- Gambar sisi DA dengan gerakan relatif
Menambahkan komentar seperti ini membantu untuk tetap teratur, dan menunjukkan langkah-langkah yang diperlukan secara berurutan untuk menyelesaikan tugas yang ada.

Menggambar Sisi AB dengan Gerakan Relatif
Tambahkan blok Pindahkan ke posisi di bawah komentar "Pindah ke titik A dengan gerakan absolut". Masukkan koordinat awal (titik A) dalam parameter.
- Titik A (100, 100, 0)
Proyek ini dimulai sama seperti proyek sebelumnya, karena dimulai dengan gerakan absolut.

Untuk menggambar sisi AB dengan pergerakan relatif, kita akan menggunakan blok Posisi kenaikan . 
Blok posisi kenaikan menggerakkan Lengan 6-Sumbu untuk jarak tertentu sepanjang sumbu x, y, z. Ini adalah blok yang akan kita gunakan untuk menggerakkan Lengan 6-Sumbu dengan gerakan relatif. Blok posisi kenaikanmenggerakkan Lengan 6-Sumbu pada jarak yang relatif terhadap lokasinya saat ini.
Tambahkan blok Posisi kenaikan di bawah komentar "Gambar sisi AB dengan gerakan relatif".

Perhatikan bahwa blok Posisi kenaikan memiliki parameter untuk sumbu x, y, dan z. Hal ini terkait denganseberapa jauhLengan 6-Sumbu akan bergerak sepanjang setiap sumbu, atau pergerakan relatif Lengan 6-Sumbu pada setiap sumbu. Parameter ini adalahbukannilai koordinat, seperti yang ada di blok Pindahkan ke posisi , saat Lengan 6-Sumbu menggunakan gerakan absolut.
Untuk menentukan parameter yang dibutuhkan untuk menggambar sisi persegi, diperlukan dua informasi:
- jarak untuk menggerakkan Lengan 6-Sumbu relatif terhadap posisi saat ini
- sumbu atau sumbu-sumbu yang akan digerakkan oleh Lengan 6-Sumbu
Untuk menggambar sisi AB dari persegi, jarak Lengan 6-Sumbu akan bergerak relatif terhadap posisi saat ini adalah panjang sisi, atau 75mm. Untuk bergerak dari titik A ke titik B, Lengan 6-Sumbu akan bergerak sepanjang sumbu x dalam arah positif. Ia tidak akan bergerak sepanjang sumbu y atau z.

Tetapkan parameter x ke 75 di blok Posisi kenaikan . Parameter y dan z tetap 0.
Ini akan menggerakkan Lengan 6-Sumbu sejauh 75 mm sepanjang sumbu x saja, dalam arah positif.

Lihatlah proyek tersebut sebagaimana adanya saat ini. Menurut Anda apa yang akan terjadi pada Lengan 6-Sumbu saat dijalankan?
Catat prediksi Anda di buku catatan teknik Anda. Gambarlah apa yang menurut Anda akan digambar oleh Lengan 6-Sumbu.

Pastikan Lengan 6-Sumbu terhubung ke VEXcode. Jalankan proyek dan amati perilaku Lengan 6-Sumbu.

Hentikan proyek ketika Lengan 6-Sumbu berhenti bergerak.
Apakah Lengan 6-Sumbu bergerak seperti yang Anda prediksi? Mengapa atau mengapa tidak?

Menggambar Sisi BC dengan Gerakan Relatif
Kita dapat menerapkan apa yang kita pelajari untuk menggambar sisi pertama persegi, untuk menggambar sisi BC.
Tambahkan blok Posisi kenaikan di bawah komentar "Gambar sisi BC dengan pergerakan relatif".

Tentukan parameter blok Posisi kenaikan .
Untuk menggambar sisi BC, Lengan 6-Sumbu perlu bergerak sejauh 75mm. Melihat arah pergerakan relatif terhadap posisi saat ini, kita melihat bahwa Lengan 6-Sumbu perlu bergerak sepanjang sumbu y. Lengan 6-Sumbu tidak boleh bergerak sepanjang sumbu x atau z.

Tetapkan parameter y dari blok Posisi kenaikan ke 75.
Ini akan menggerakkan Lengan 6-Sumbu sejauh 75 mm sepanjang sumbu y. Karena parameter untuk sumbu x dan z adalah 0, Lengan 6-Sumbu tidak akan bergerak pada sumbu x atau z.

Prediksikan menurut Anda bagaimana Lengan 6-Sumbu akan bergerak saat proyek dijalankan. Catat prediksi Anda di buku catatan teknik Anda.
Buat sketsa apa yang menurut Anda akan digambar oleh Lengan 6-Sumbu.

Jalankan proyek dan amati perilaku Lengan 6-Sumbu.
Hentikan proyek ketika Lengan 6-Sumbu selesai bergerak.
Apakah Lengan 6-Sumbu menggambar apa yang Anda prediksi? Mengapa atau mengapa tidak?

Menggambar Sisi CD dengan Gerakan Relatif
Sekarang setelah kita menggambar dua sisi pertama persegi, kita dapat melanjutkan membangun proyek kita dengan menggambar sisi CD.
Tambahkan blok Posisi kenaikan di bawah komentar "Gambar sisi CD dengan gerakan relatif".

Tentukan parameter untuk blok Posisi kenaikan .
Untuk menggambar sisi CD, panjang sisinya masih 75mm. Melihat arah pergerakan tersebut relatif terhadap posisi Lengan 6-Sumbu saat ini, kita melihat bahwa pergerakannya lagi-lagi sepanjang sumbu x.
Lengan 6-Sumbu tidak boleh bergerak pada sumbu y atau z di sisi persegi ini.

Tetapkan parameter x dari blok Posisi kenaikan ke 75.

Prediksikan menurut Anda bagaimana Lengan 6-Sumbu akan bergerak saat proyek dijalankan. Catat prediksi Anda di buku catatan teknik Anda, dan pastikan untuk menyertakan sketsa tentang apa yang menurut Anda akan digambar.

Jalankan proyek dan amati perilaku Lengan 6-Sumbu.
Apakah hasilnya sesuai dengan prediksi Anda? Mengapa atau mengapa tidak?

Lengan 6-Sumbu melakukanbukansisi penarikan CD sebagaimana dimaksudkan.
Mari kita lihat mengapa itu terjadi. Panjang sisinya tidak berubah, jadi panjang garis yang ditarik sudah benar. Akan tetapi, arahdari gerakan itu tidak demikian.
Kita dapat memperhitungkan pergerakan dalam arah positif atau negatif dengan memasukkan parameter di blok Posisi kenaikan sebagai angka positif atau negatif.

Untuk sisi AB dan BC, Lengan 6-Sumbu bergerak dalam arah positif sepanjang sumbu x dan y, jadi kami menggunakan angka positif. Tetapi untuk menggambar sisi CD, Lengan 6-Sumbu perlu bergerak dalam arahnegatif, jadi kita perlu menggunakan nilai negatif dalam parameter.
Tetapkan parameter x dari blok Posisi kenaikan ke –75.
Ini akan menggerakkan Lengan 6-Sumbu sejauh 75 mm dalam arahnegatifsepanjang sumbu x. Nilai sumbu y dan z tidak perlu diubah, karena Lengan 6-Sumbu masih belum bergerak sepanjang sumbu tersebut untuk menggambar sisi CD.

Jalankan proyek lagi, dan amati perilaku Lengan 6-Sumbu.
Apakah sisi CD digambar sebagaimana mestinya? Mengapa atau mengapa tidak?
Menggambar Sisi DA dengan Gerakan Relatif
Sekarang setelah kita menggambar tiga sisi persegi, kita dapat menerapkan apa yang telah kita pelajari untuk menggambar sisi akhirnya.
Tambahkan blok posisi kenaikan di bawah komentar "Gambar sisi DA dengan pergerakan relatif".

Tentukan parameter untuk blok Posisi kenaikan .
Untuk menggambar sisi DA, Lengan 6-Sumbu kembali bergerak sejauh 75mm. Melihat arah pergerakan tersebut berdasarkan posisi saat ini, Lengan 6-Sumbu perlu bergerak sepanjang sumbu y lagi. Tidak perlu bergerak sepanjang sumbu x atau z untuk menggambar sisi DA.

Tetapkan parameter y dari blok Posisi kenaikan ke 75. Parameter x dan z harus tetap 0.

Prediksikan bagaimana Lengan 6-Sumbu akan bergerak dan apa yang akan digambar saat proyek dijalankan. Catat prediksi Anda di buku catatan teknik Anda.

Jalankan proyek dan amati perilaku Lengan 6-Sumbu.
Apakah pergerakannya sesuai prediksi Anda? Apakah menggambar sisi akhir persegi sebagaimana dimaksudkan? Mengapa atau mengapa tidak?

Untuk menggambar sisi DA sebagaimana dimaksud, Lengan 6-Sumbu perlu bergerak dalam arahnegatifsepanjang sumbu y. Namun, kami menetapkan parameter y ke 75mm, yang menunjukkan bahwa Lengan 6-Sumbu harus bergerak dalam arahpositifsepanjang sumbu y.

Tetapkan parameter y dari blok Posisi Kenaikan terakhirke –75. Parameter x dan z harus tetap 0, karena Lengan 6-Sumbu tidak perlu bergerak pada sumbu ini untuk menggambar sisi DA sebagaimana dimaksud.
Lengan 6-Sumbu sekarang harus bergerak sepanjang sumbu y dalam arah negatif untuk melengkapi persegi.

Jalankan proyek dan amati pergerakan Lengan 6-Sumbu.
Apakah menggambar persegi seperti yang diinginkan? Mengapa atau mengapa tidak?
Pastikan untuk mengganti nama dan menyimpan proyek Anda.

Mengapa Menggunakan Gerakan Relatif?
Sementara gerakan Lengan 6-Sumbu sama untuk menggambar persegi 75mm dengan gerakan absolut dan relatif, ada fleksibilitas dan kemudahan tambahan saat kita menggunakan gerakan relatif. Misalnya, jika Anda ingin menggambar persegi berukuran 75mm di lokasi berbeda, apa yang akan Anda lakukan? Dengan menggunakan gerakan absolut, Anda akan menemukan koordinat baru dari keempat titik dan mengkodekan Lengan 6-Sumbu untuk menghubungkannya. Namun, dengan menggunakan pergerakan relatif, Anda hanya perlu mengetahui koordinat awal, dan sisanya tetap sama.
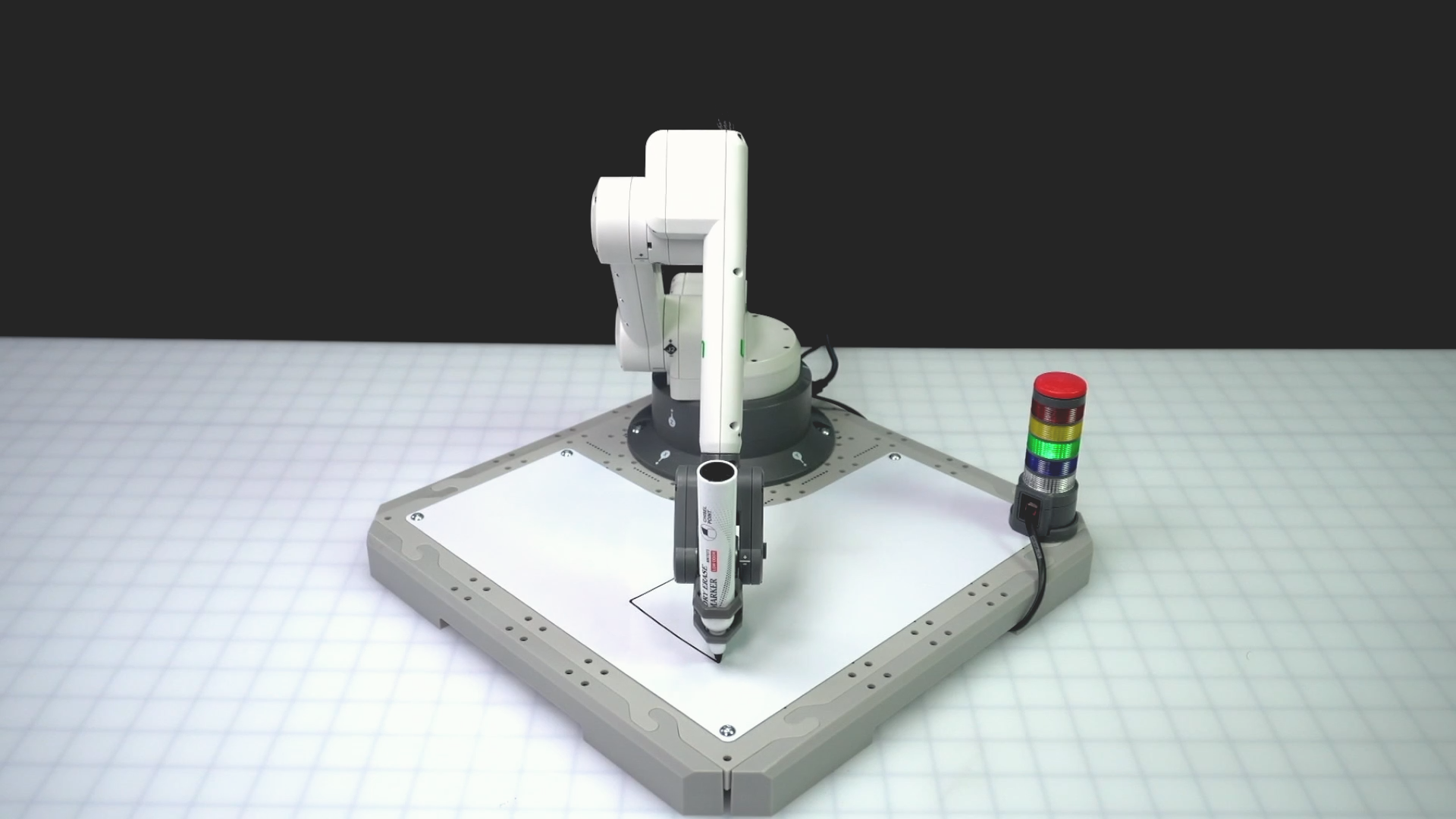
Pergerakan absolut akan selalu membawa Anda ke koordinat yang sama, tidak peduli lokasi awalnya. Ini berguna saat Anda perlu memindahkan Lengan 6-Sumbu ke lokasi tertentu untuk memulai proyek, atau untuk memastikan Anda dapat mencapai lokasi tersebut terlepas dari koordinat sebelumnya. Video di bawah menunjukkan spidol yang dimulai pada tiga lokasi berbeda pada lampiran papan tulis. Semua penanda bergerak ke lokasi (75, 75, 0) karena mereka bergerak dengan gerakan absolut.
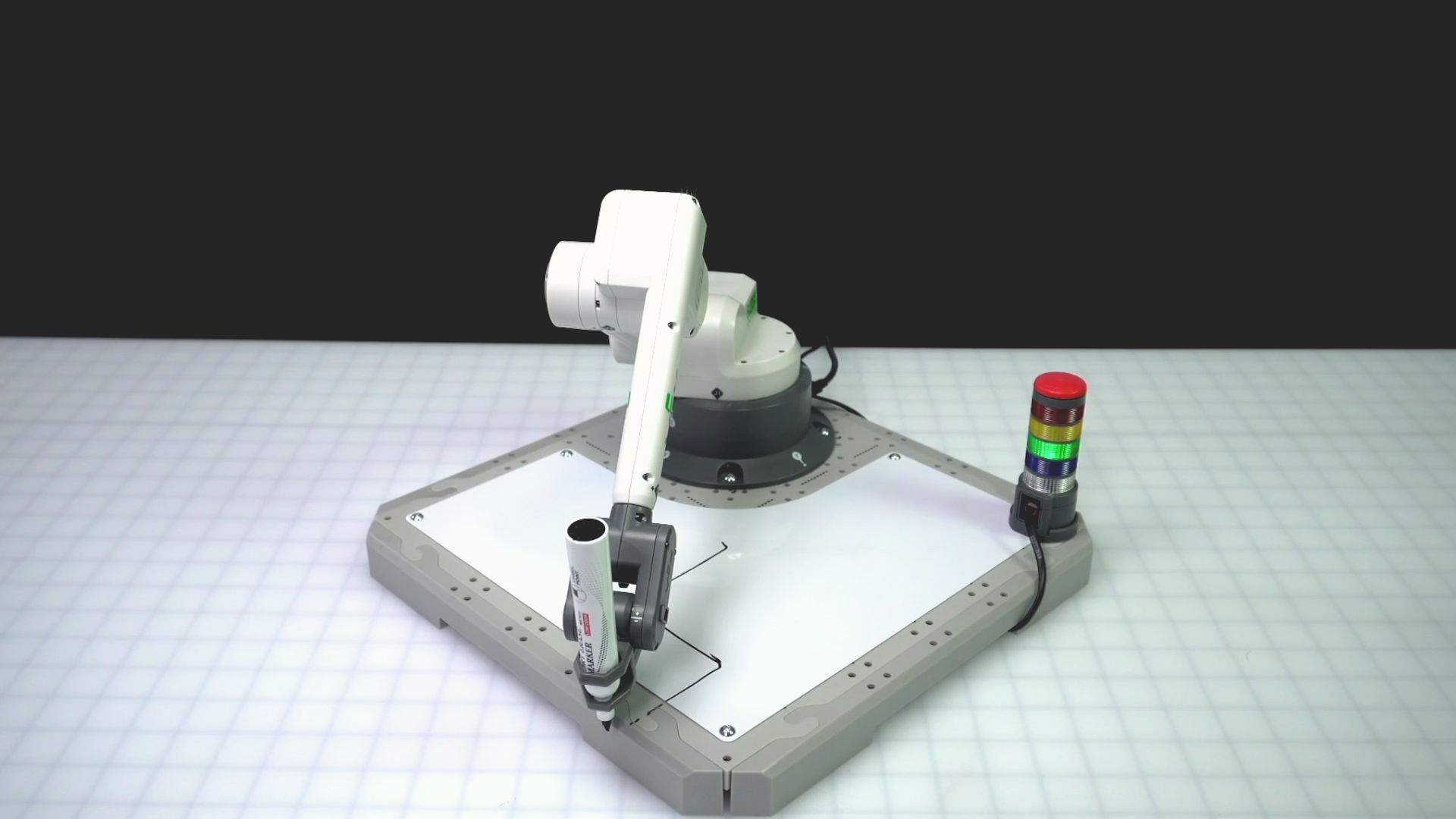
Pergerakan relatif akan berpindah ke lokasi baru berdasarkan posisi saat ini. Hal ini berguna saat Anda perlu menggerakkan Lengan 6-Sumbu dalam kaitannya dengan lokasi yang diketahui, seperti yang Anda lakukan saat menggambar persegi atau bergerak dalam pola tertentu. Video di bawah menunjukkan penanda yang dimulai pada tiga lokasi yang sama seperti di atas pada lampiran papan tulis. Semua penanda bergerak diagonal pada saat yang sama karena nilai x-nya ditingkatkan sebesar 75 dan nilai y-nya ditingkatkan sebesar 75 pada saat yang sama. Lokasi akhir penanda semuanya berbeda dan berhubungan langsung dengan posisi awalnya dengan peningkatan nilai x dan y.
Kedua proyek dalam Pelajaran ini menggunakan informasi yang sama, tetapi cara penggunaannya dalam kode berbeda. Mari kita lihat proyek kami secara lebih rinci. Gambar di sebelah kiri adalah dari proyek gerakan absolut kami. Panjang sisi 75mm sesuai dengan perubahan koordinat x yang dibutuhkan untuk bergerak dari titik A ke titik B.
Gambar di sebelah kanan adalah dari proyek pergerakan relatif kami. Di sini panjang sisi 75mm sesuai dengan sejauh mana Lengan 6-Sumbu bergerak sepanjang sumbu x. 
Menggunakan pergerakan relatif dapat memberi Anda fleksibilitas tambahan dalam proyek Anda, sehingga membuat adaptasi dan penyesuaian kode Anda untuk berbagai tujuan menjadi lebih sederhana.
Aktivitas
Sekarang setelah Anda mengkodekan Lengan Sumbu 6 untuk bergerak menggunakan gerakan absolut dan relatif, sekarang saatnya untuk melatih keterampilan ini. Dalam Aktivitas ini, Anda akan mengedit proyek Anda untuk mengkode Lengan 6-Sumbu untuk menggambar tiga kotak di Papan Tulis. 
Penyiapan: Catat informasi berikut di buku catatan teknik Anda.
- Koordinat awal untuk setiap kotak adalah sebagai berikut:
- Persegi ABCD (100, 150, 0)
- Kuadrat EFGH (-5, 153, 0)
- Persegi IJKL (155, 57, 0)
- Panjang semua sisi ketiga persegi tersebut adalah 50 mm.
- Kotak-kotak tersebut tidak boleh saling bersentuhan.
Aktivitas:Bangun proyek Anda dari Pelajaran ini untuk mengkode Lengan 6-Sumbu untuk menggambar dua kotak tambahan.
- Catatlah rencana proyek Anda di buku catatan teknik Anda. Pastikan kelompok Anda sepakat tentang kotak mana yang akan digambar pertama, kedua, dan ketiga, serta jenis gerakan apa yang akan Anda gunakan untuk menyelesaikan gambar.
- Bangun proyek Anda dari Pelajaran ini untuk mengikuti rencana Anda di buku catatan teknik Anda.
- Jalankan proyek Anda untuk mengujinya. Pastikan Lengan 6-Sumbu Anda terhubung ke VEXcode. Apakah proyek Anda menggambar ketiga kotak sebagaimana dimaksudkan? Mengapa atau mengapa tidak?
- Terus ulangi proyek Anda hingga Anda berhasil menggambar ketiga kotak. Beri nama dan simpan proyek Anda setelah selesai.
Periksa Pemahaman Anda
Sebelum memulai Pelajaran berikutnya, pastikan Anda memahami konsep dalam Pelajaran ini dengan menjawab pertanyaan dalam dokumen di bawah ini di buku catatan teknik Anda.
Pertanyaan Periksa Pemahaman Anda > (Google Doc / .docx / .pdf)
PilihBerikutnya > untuk melanjutkan ke Pelajaran 2.