
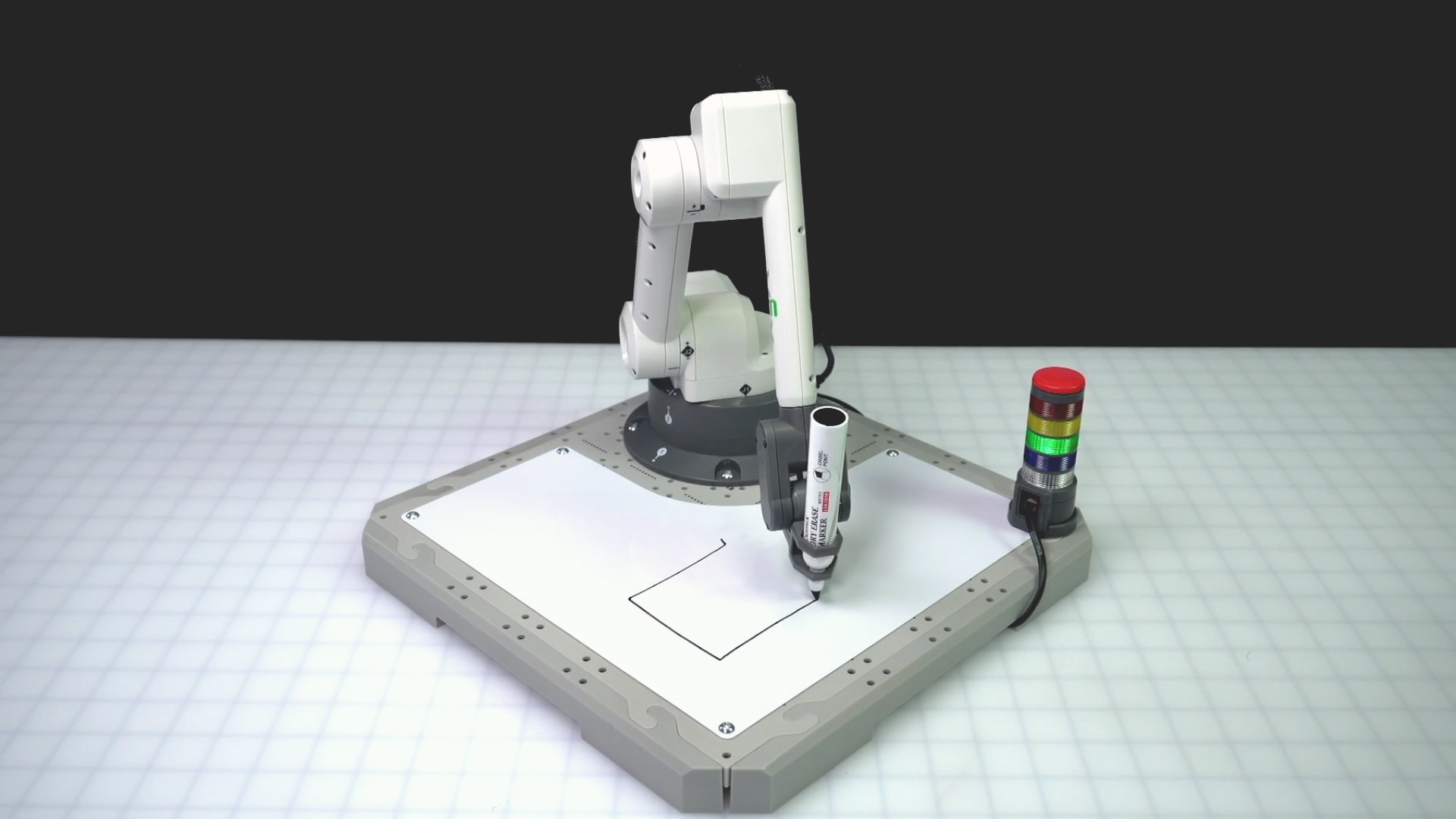
Auparavant, vous déplaciez le bras à 6 axes vers des coordonnées spécifiques pour dessiner diverses formes. Dans cette leçon, vous apprendrez une autre façon de déplacer le bras à 6 axes pour dessiner un carré. Vous serez initié aux concepts de mouvement absolu et relatif, afin de pouvoir combiner les deux types de mouvement pour coder le bras à 6 axes.
Dans cette leçon, vous apprendrez :
- La différence entre le mouvement absolu et relatif.
- Quand appliquer un mouvement absolu ou relatif dans un projet pour déplacer le bras à 6 axes comme prévu.
- Comment utiliser les blocs d'incrémentation de position dans un projet pour coder les mouvements relatifs.
À la fin de cette leçon, vous coderez le bras à 6 axes pour dessiner des carrés, en utilisant une combinaison de mouvements absolus et relatifs.
Dessiner un carré avec un mouvement absolu
Dans l'unité précédente, vous avez dessiné un carré en trouvant les coordonnées de chaque point et en déplaçant le bras à 6 axes vers ces emplacements spécifiques. Passons en revue ce processus, afin que nous puissions faire attention au type de mouvement que le bras à 6 axes utilise.
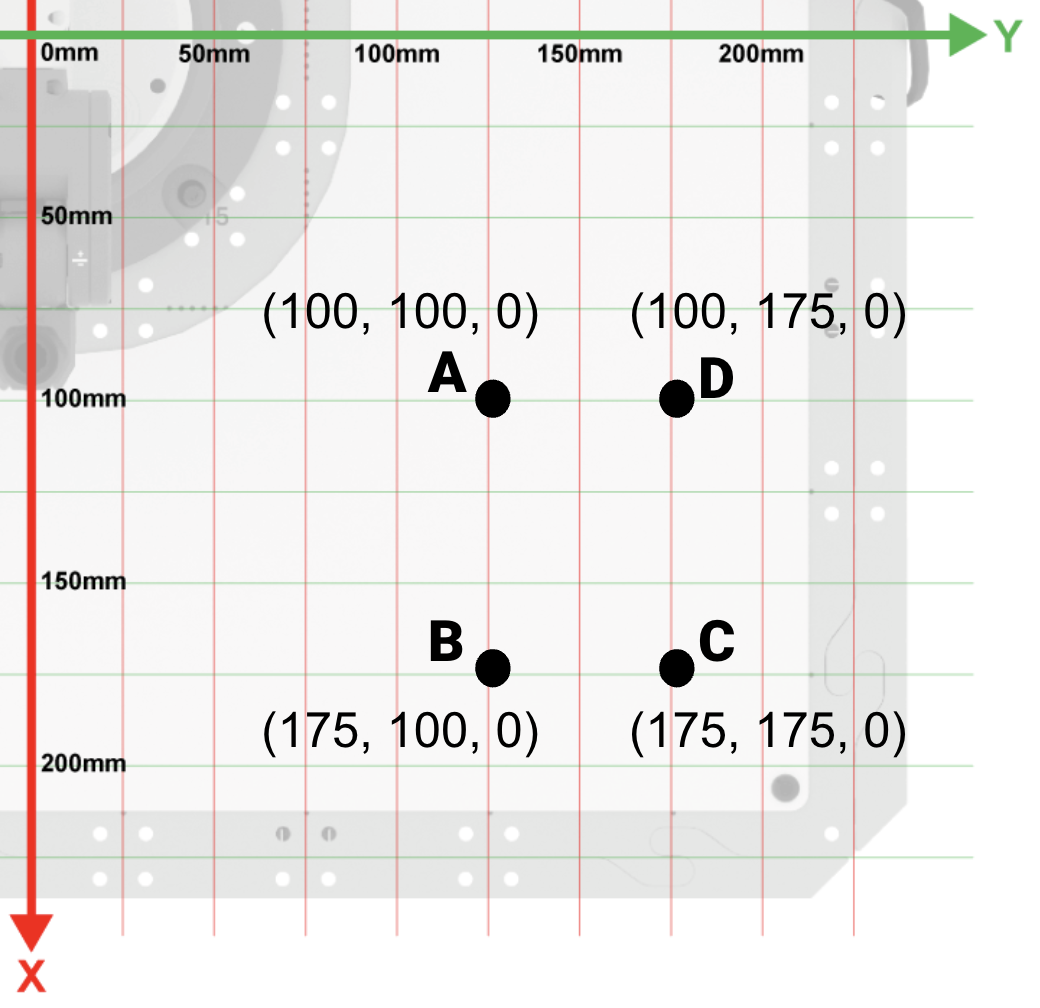
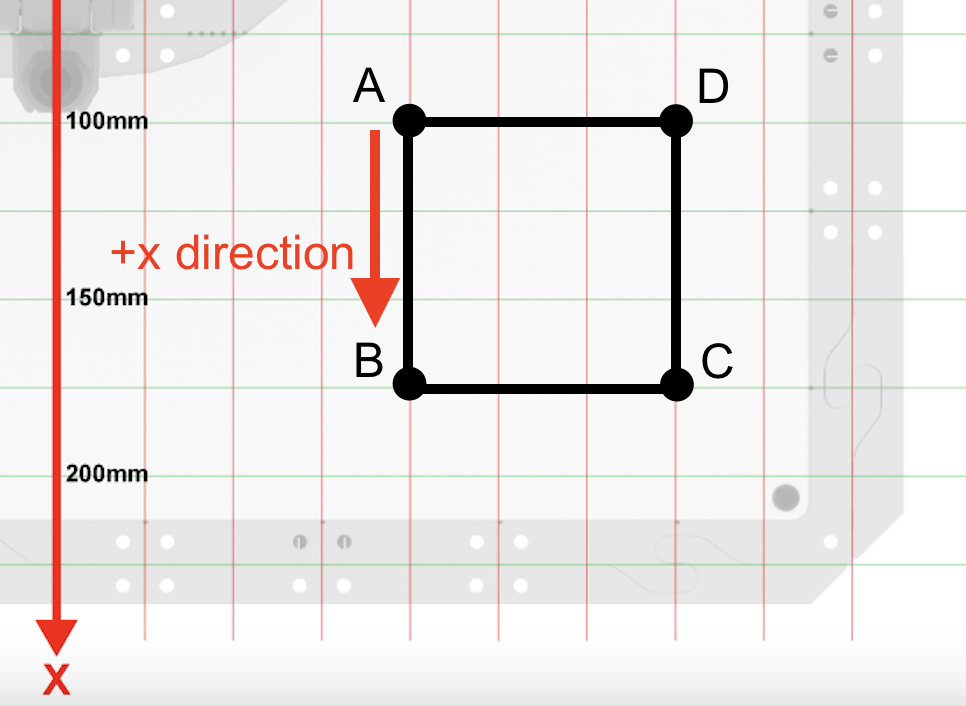
Documentez les coordonnées du carré ABCD.
Dans votre cahier d'ingénierie, enregistrez les informations connues sur le carré.
- Chaque longueur latérale est de 75 mm
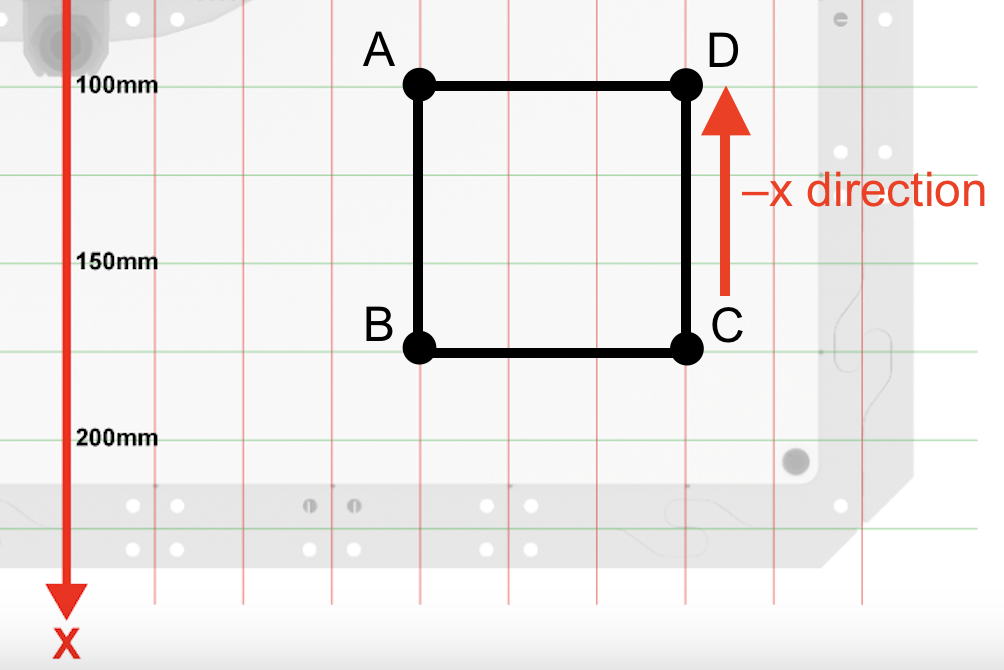
- Le point A est (100, 100, 0)
- Le point B est (175, 100, 0)
- Le point C est (175, 175, 0)
- Le point D est (100, 175, 0)
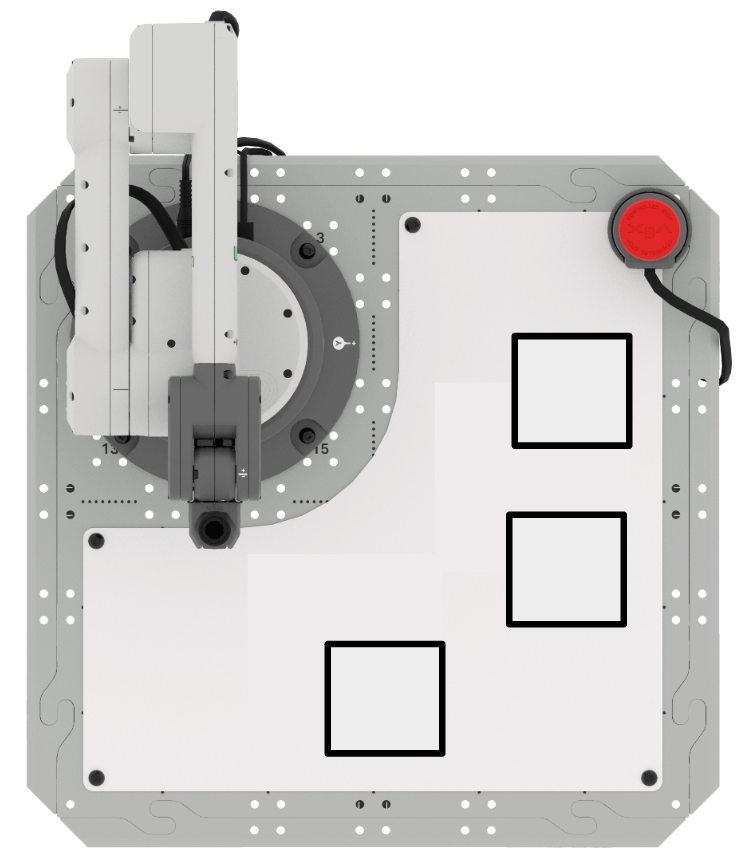
Ouvrez un projet New Blocks en suivant les étapes de cette vidéo.
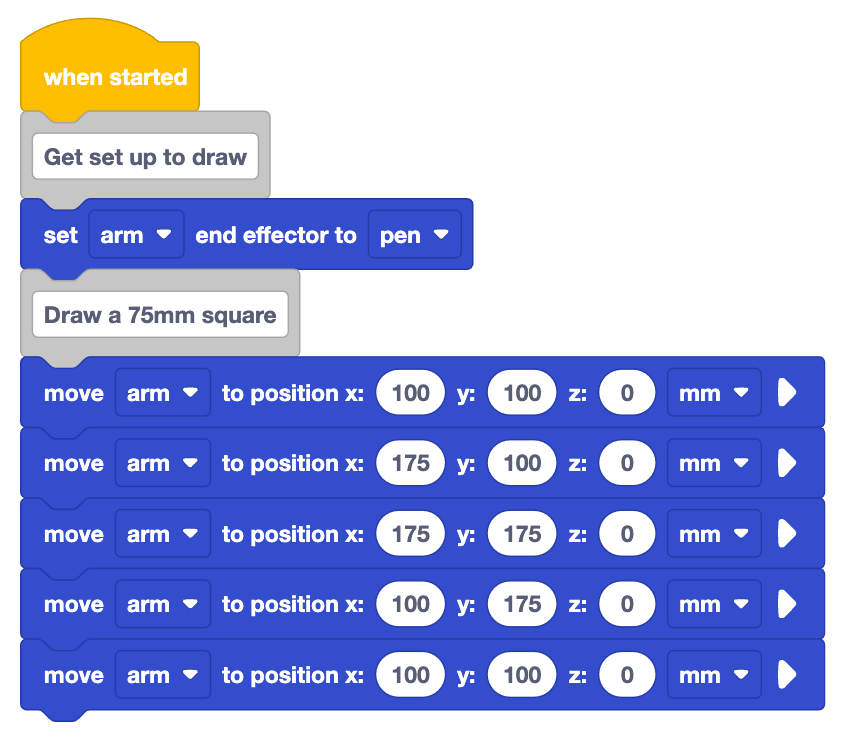
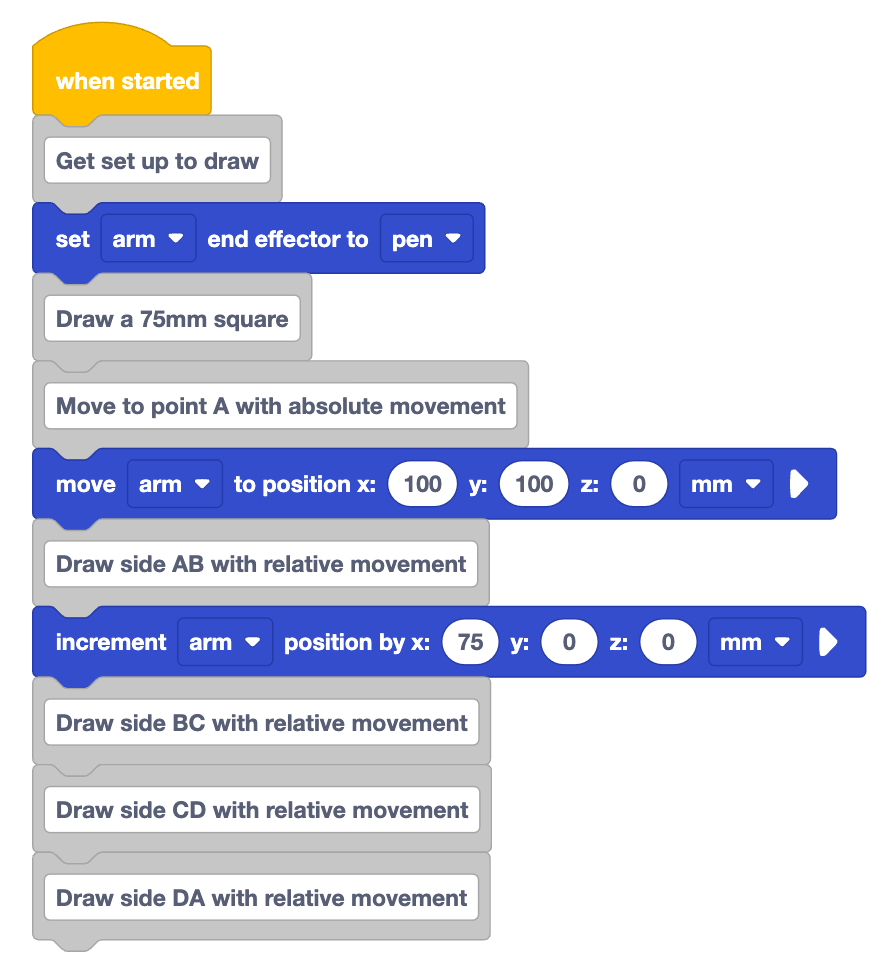
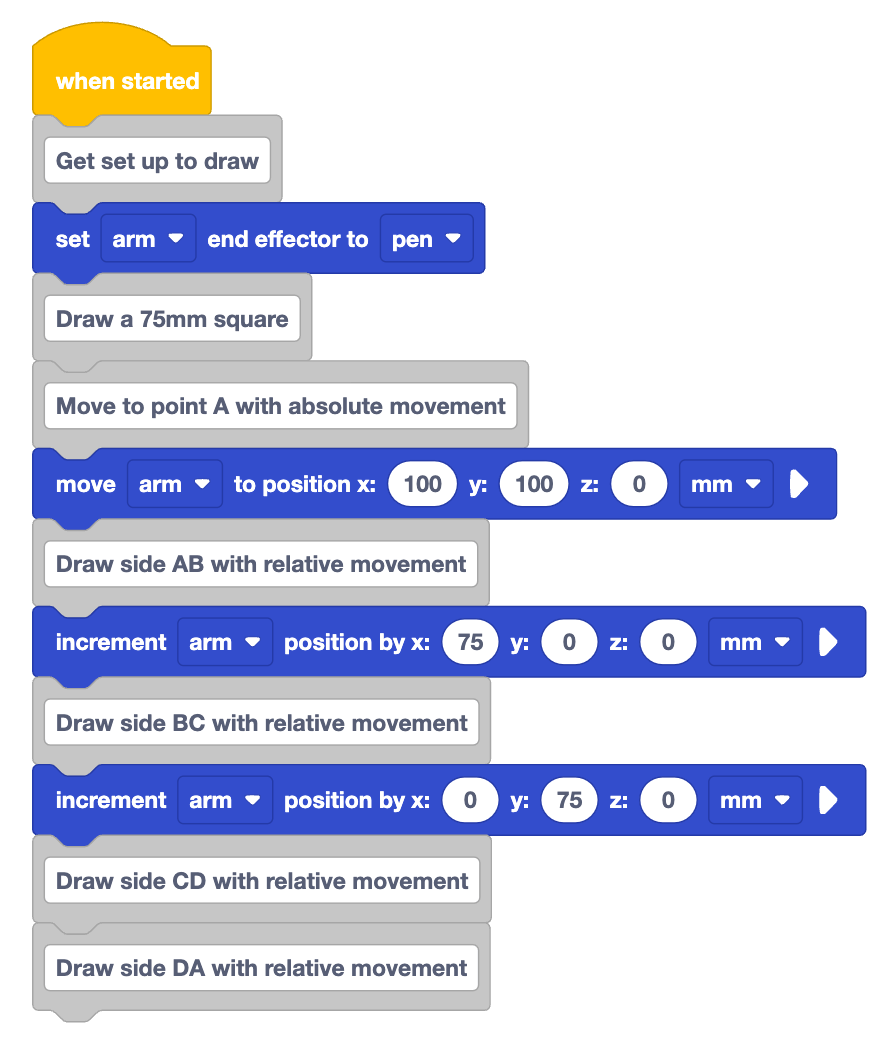
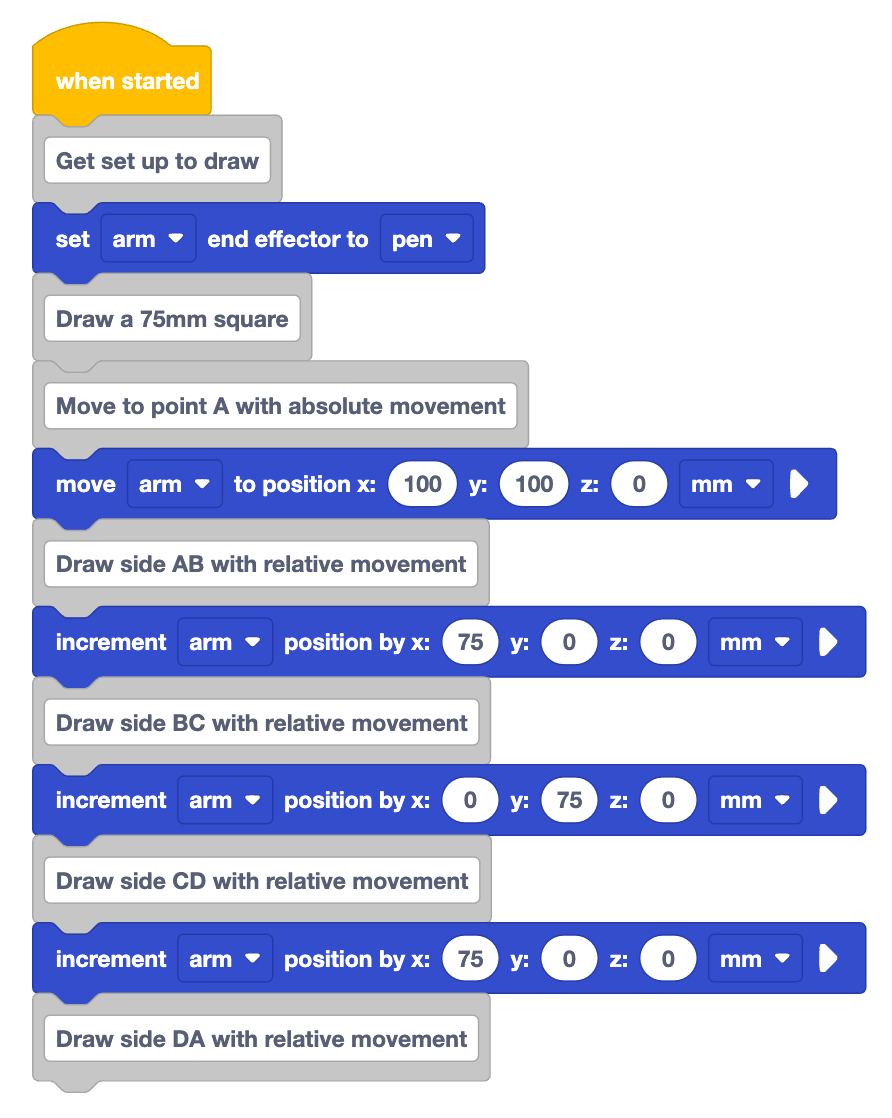
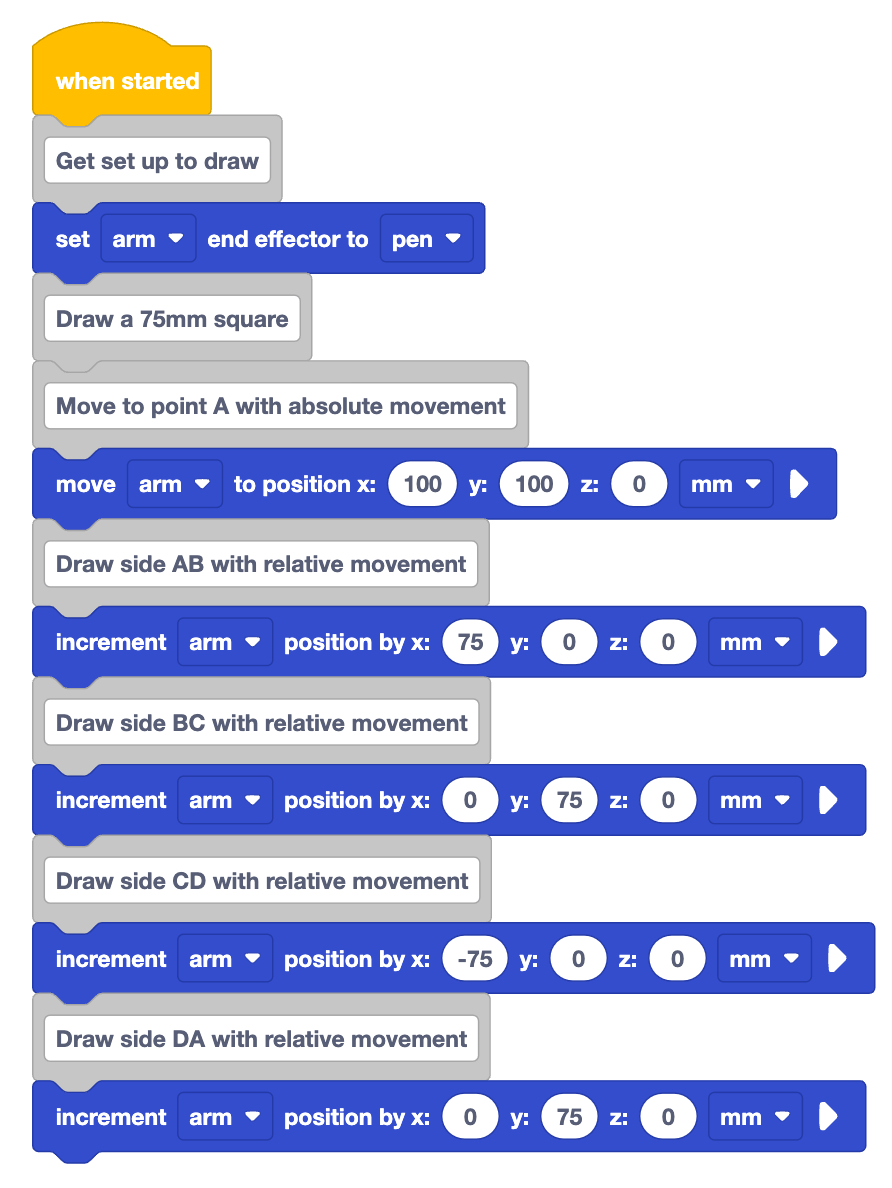
Recréez le projet présenté ici dans VEXcode.

Regardez les blocs dans le projet. Que pensez-vous que le bras à 6 axes fera lorsque ce projet sera exécuté ?
Enregistrez votre prévision dans votre cahier d'ingénierie. Décrivez comment le bras à 6 axes se déplacera avec des mots et esquissez ce que vous pensez être dessiné sur le tableau blanc.
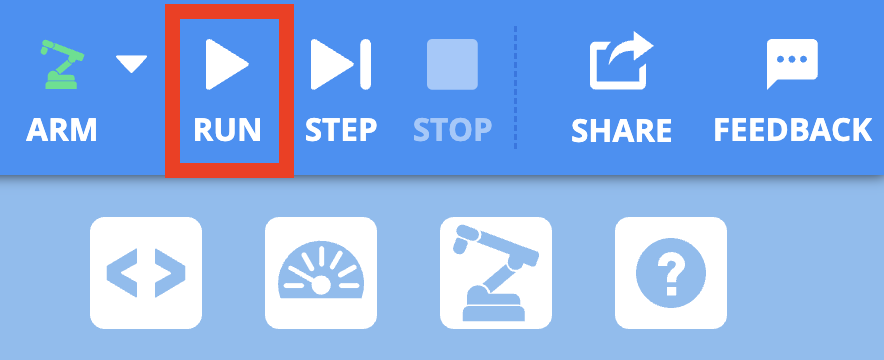
Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez le projet et observez le comportement du bras à 6 axes.
Arrêtez le projet lorsque le bras à 6 axes a fini de bouger.
Le bras à 6 axes a-t-il dessiné ce que vous aviez prédit ? Pourquoi ou pourquoi pas ?
Dans ce projet, le bras à 6 axes utilise le mouvement absolu pour dessiner le carré. Cela signifie que le bras à 6 axes se déplace vers des coordonnées spécifiques afin de dessiner chaque côté du carré. Il atteindra ces mêmes coordonnées, peu importe où le bras à 6 axes était positionné auparavant. Cela peut parfois être utile, mais cela nous oblige à avoir des coordonnées exactes pour chaque point de la forme que nous créons. Il existe une autre façon d'utiliser les informations sur les longueurs des côtés dans un projet pour dessiner un carré.
Dessiner un carré avec un mouvement relatif
Comprendre les longueurs des côtés du carré nous aide à déterminer combien le bras à 6 axes doit se déplacer par rapport à sa position actuelle pour dessiner chaque côté avec précision. Au lieu de localiser les quatre coins du carré, nous pouvons simplement déplacer le bras par rapport au point de départ pour compléter la forme.
Qu'est-ce que le mouvement relatif ?
Le mouvement relatif déplace le bras à 6 axes vers une nouvelle position en fonction de son emplacement actuel. Compte tenu d'un point de départ et des longueurs des côtés du carré, nous pouvons déplacer le bras à 6 axes le long des axes x et y par rapport à la position de départ. Décomposons cela avec notre carré de 75 mm.
Nous allons commencer par un mouvement absolu pour arriver à la coordonnée de départ. De là,
chacun des côtés peut être dessiné avec un mouvement relatif. 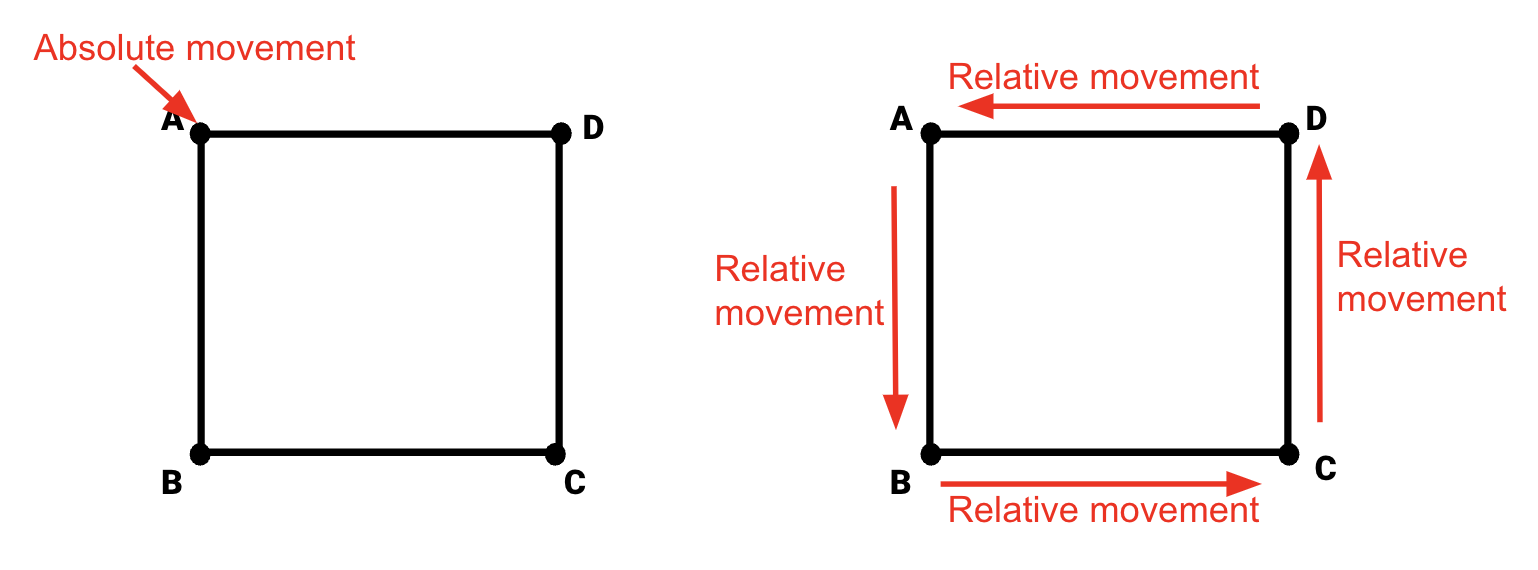
Modifions notre projet pour voir cela en action.
Retirez le bouton Déplacer vers la position des blocs utilisés pour dessiner le carré.
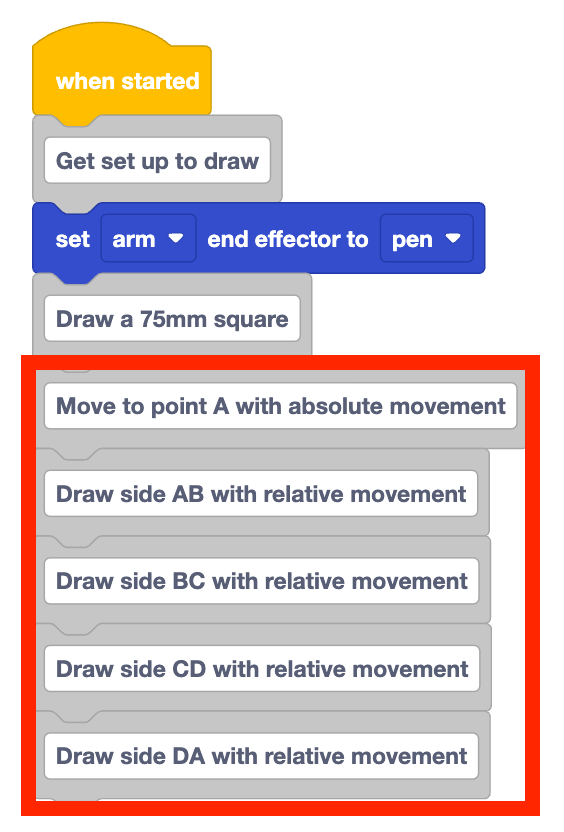
Ajoutez cinq blocs de commentaires au projet pour décrire le mouvement du bras à 6 axes afin de dessiner chaque côté du carré. Saisissez les commentaires suivants dans le projet :
- Déplacez-vous vers le point A avec un mouvement absolu
- Dessiner le côté AB avec un mouvement relatif
- Dessiner le côté BC avec un mouvement relatif
- Dessinez le CD latéral avec un mouvement relatif
- Dessiner le côté DA avec un mouvement relatif
Ajouter des commentaires comme celui-ci est utile pour rester organisé et montrer les étapes nécessaires dans l'ordre pour terminer la tâche à accomplir.
Dessin côté AB avec mouvement relatif

Ajoutez un bloc Déplacer vers la position sous le commentaire « Déplacer vers le point A avec un mouvement absolu ». Saisissez la coordonnée de départ (point A) dans les paramètres.
- Point A (100, 100, 0)
Ce projet commence de la même manière que le précédent, car il commence par un mouvement absolu.
Pour dessiner le côté AB avec un mouvement relatif, nous utiliserons un bloc de
position d'incrément. 
Le bloc de position d'incrémentation déplace le bras à 6 axes sur une distance particulière le long des axes x, y et z. C'est le bloc que nous utiliserons pour déplacer le bras à 6 axes avec un mouvement relatif. Le bloc de position d'incrémentation déplace le bras à 6 axes sur une certaine distance par rapport à son emplacement actuel.
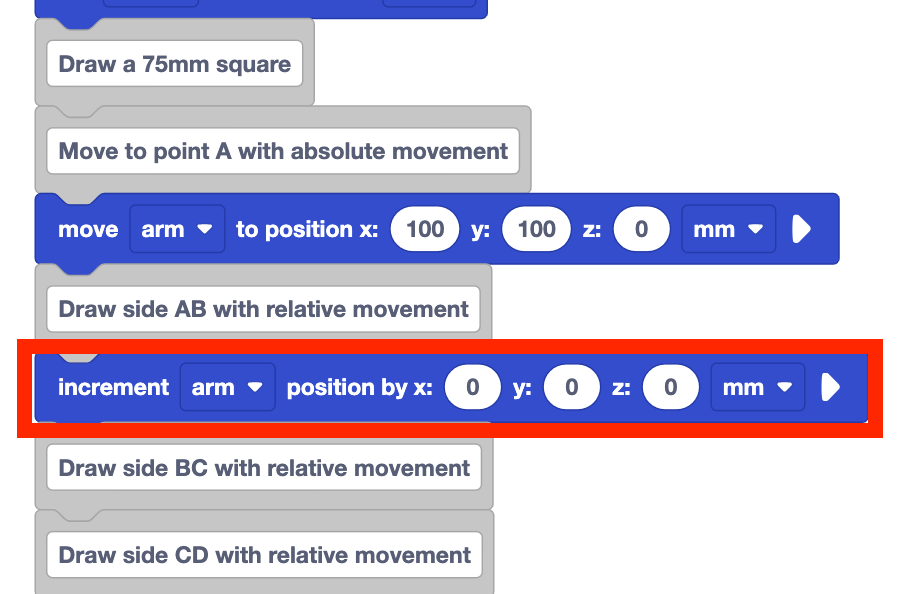
Ajoutez un bloc de position d'incrément sous le commentaire « Dessiner le côté AB avec un mouvement relatif ».
Notez que le bloc de position Incrément a des paramètres pour les axes x, y et z. Ceci est lié à la distance à laquelle le bras à 6 axes se déplacera le long de chaque axe, ou au mouvement relatif du bras à 6 axes sur chaque axe. Ces paramètres ne sont pas une valeur de coordonnée, comme ils l'étaient dans le bloc Déplacer en position, lorsque le bras à 6 axes utilisait un mouvement absolu.
Pour déterminer le (s) paramètre(s) nécessaire (s) pour dessiner un côté du carré, deux informations sont nécessaires :
- la distance pour déplacer le bras à 6 axes par rapport à la position actuelle
- l'axe ou les axes le bras à 6 axes se déplacera le long
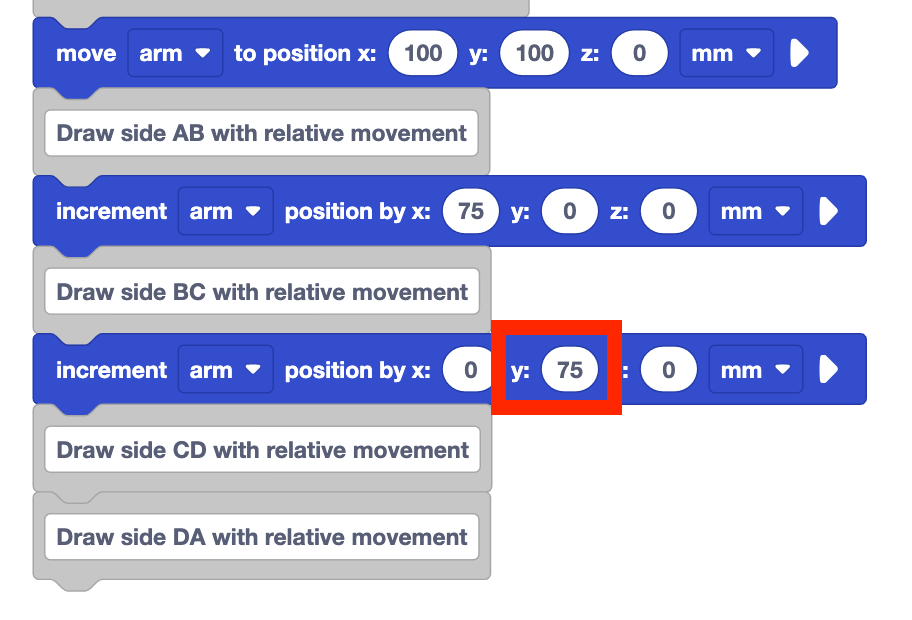
Pour dessiner le côté AB du carré, la distance que le bras à 6 axes se déplacera par rapport à la position actuelle est la longueur du côté, ou 75 mm. Pour se déplacer du point A au point B, le bras à 6 axes se déplacera le long de l'axe des x dans la direction positive. Il ne se déplacera pas le long des axes y ou z.
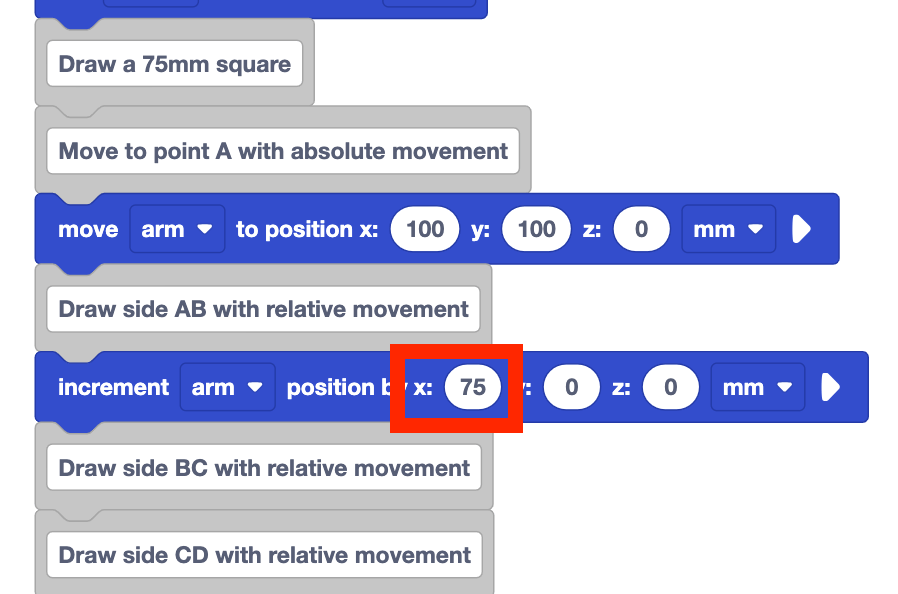
Réglez le paramètre x sur 75 dans le bloc Incrémenter la position. Les paramètres y et z restent à 0.
Cela déplacera le bras à 6 axes de 75 mm le long de l'axe des x uniquement, dans la direction positive.
Regardez le projet tel qu'il est en ce moment. Selon vous, que fera le bras à 6 axes lorsqu'il sera en marche ?
Enregistrez votre prévision dans votre cahier d'ingénierie. Dessinez ce que vous pensez que le bras à 6 axes va dessiner.

Assurez-vous que le bras à 6 axes est connecté à VEXcode. Exécutez le projet et observez le comportement du bras à 6 axes.
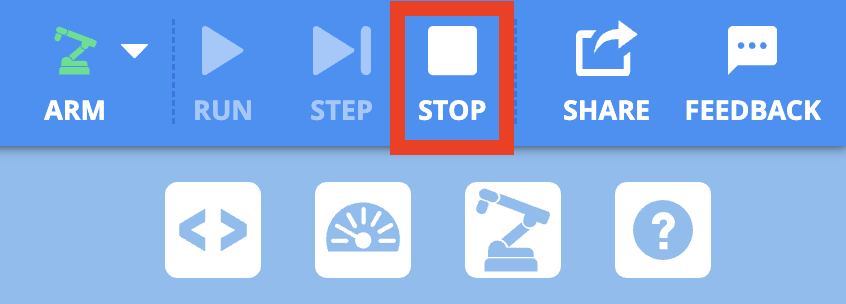
Arrêtez le projet lorsque le bras à 6 axes a cessé de bouger.
Le bras à 6 axes a-t-il bougé comme prévu ? Pourquoi ou pourquoi pas ?
Côté dessin BC avec mouvement relatif
Nous pouvons appliquer ce que nous avons appris pour dessiner le premier côté du carré, pour dessiner le côté BC.
Ajoutez un bloc de position d'incrément sous le commentaire « Dessiner le côté BC avec un mouvement relatif ».
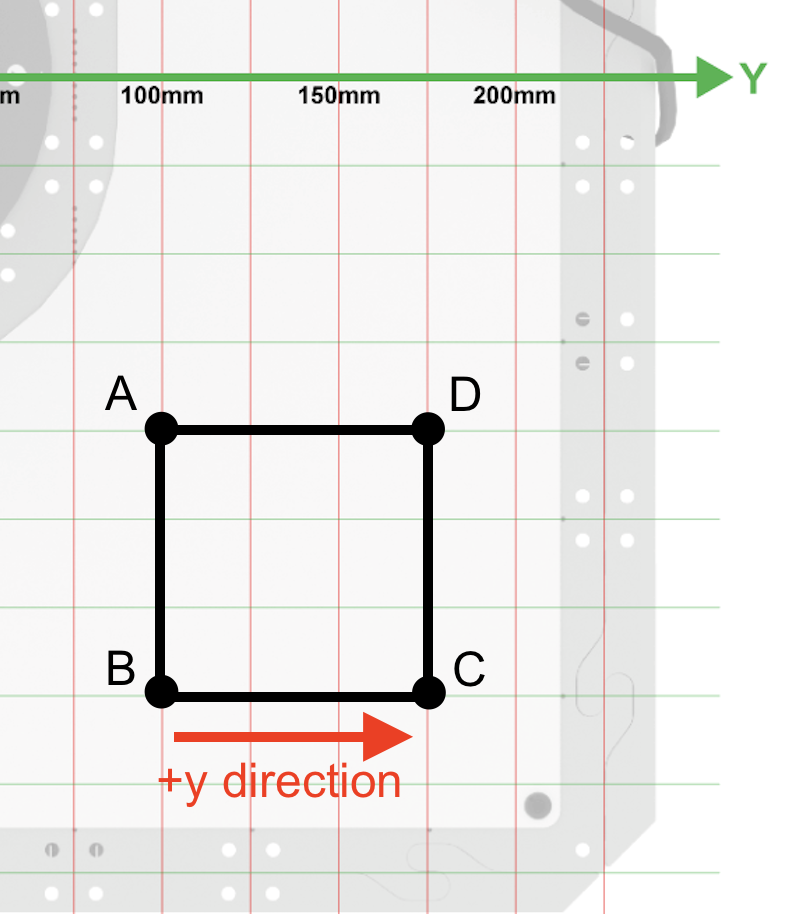
Déterminez les paramètres du bloc de position Incrément.
Pour dessiner le côté BC, le bras à 6 axes doit se déplacer de 75 mm. En regardant la direction du mouvement par rapport à la position actuelle, nous voyons que le bras à 6 axes doit se déplacer le long de l'axe y. Le bras à 6 axes ne doit pas se déplacer le long des axes x ou z.
Réglez le paramètre y du bloc de position d'incrémentation sur 75.
Cela déplacera le bras à 6 axes de 75 mm le long de l'axe y. Étant donné que les paramètres pour les axes x et z sont 0, le bras à 6 axes ne se déplacera pas sur les axes x ou z.
Prédisez comment vous pensez que le bras à 6 axes se déplacera lorsque le projet sera exécuté. Enregistrez votre prévision dans votre cahier d'ingénierie.
Esquissez ce que vous pensez que le bras à 6 axes va dessiner.
Exécutez le projet et observez le comportement du bras à 6 axes.
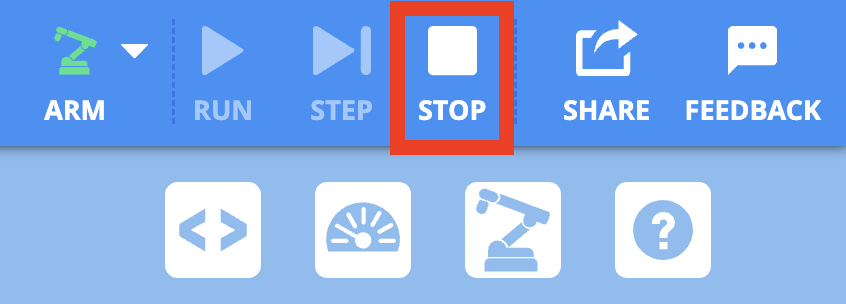
Arrêtez le projet lorsque le bras à 6 axes a fini de bouger.
Le bras à 6 axes a-t-il dessiné ce que vous aviez prédit ? Pourquoi ou pourquoi pas ?
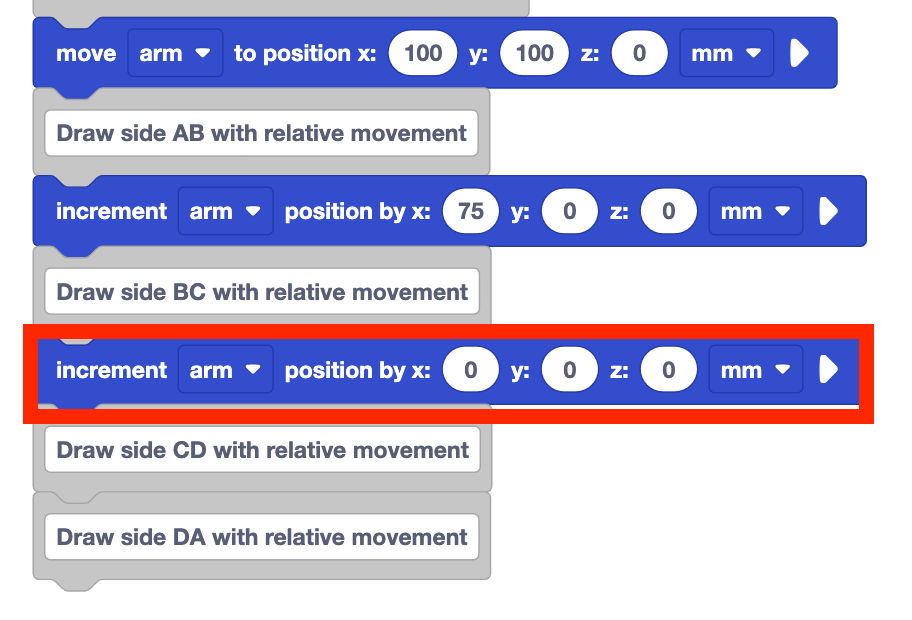
CD côté dessin avec mouvement relatif
Maintenant que nous avons dessiné les deux premiers côtés de la place, nous pouvons continuer à tirer parti de notre projet pour dessiner un CD latéral.
Ajoutez un bloc de position d'incrément sous le commentaire « Dessiner un CD latéral avec un mouvement relatif ».
Déterminez les paramètres du bloc de position Incrément.
Pour dessiner le CD latéral, la longueur latérale est toujours de 75 mm. En regardant la direction de ce mouvement par rapport à la position actuelle du bras à 6 axes, nous voyons que le mouvement est à nouveau le long de l'axe des x.
Le bras à 6 axes ne doit pas se déplacer sur les axes y ou z de ce côté du carré.

Réglez le paramètre x du bloc d'incrémentation de position sur 75.
Prédisez comment vous pensez que le bras à 6 axes se déplacera lorsque le projet sera exécuté. Enregistrez votre prédiction dans votre cahier d'ingénierie et assurez-vous d'inclure un croquis de ce que vous pensez être dessiné.

Exécutez le projet et observez le comportement du bras à 6 axes.
A-t-il dessiné ce que vous aviez prédit ? Pourquoi ou pourquoi pas ?
Le bras à 6 axes n'a pas dessiné le CD latéral comme prévu.
Voyons pourquoi cela s'est produit. La longueur du côté n'a pas changé, donc la longueur de la ligne tracée est correcte. Cependant, la direction de ce mouvement ne l'est pas.
Nous pouvons tenir compte du déplacement dans une direction positive ou négative en entrant le paramètre dans le bloc de position d'incrément comme un nombre positif ou négatif.
Pour les côtés AB et BC, le bras à 6 axes se déplaçait dans la direction positive le long des
axes x et y, nous avons donc utilisé un nombre positif. Mais pour dessiner un CD latéral, le
bras à 6 axes doit se déplacer dans la direction négative, nous
devrons donc utiliser une valeur négative dans le paramètre.
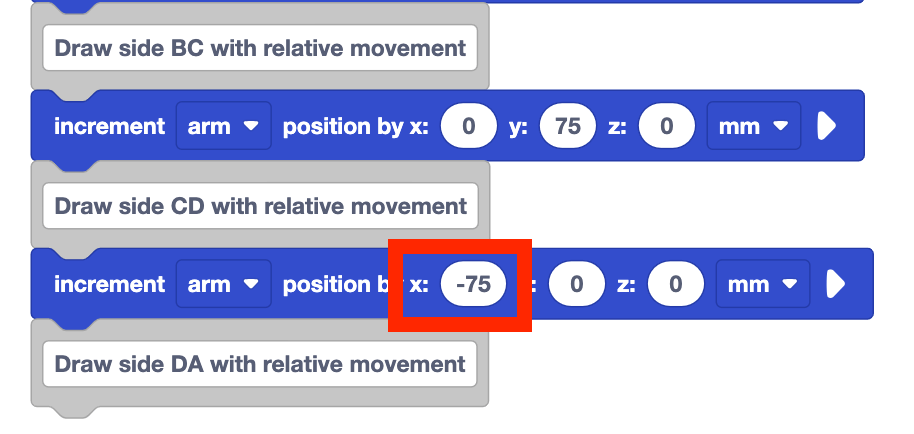
Réglez le paramètre x du bloc d'incrémentation de position sur –75.
Cela déplacera le bras à 6 axes de 75 mm dans la direction négative le long de l'axe des x. Les valeurs des axes y et z n'ont pas besoin de changer, car le bras à 6 axes ne se déplace toujours pas le long de ces axes pour dessiner le CD latéral.
Relancez le projet et observez le comportement du bras à 6 axes.
Le CD latéral est-il dessiné comme prévu ? Pourquoi ou pourquoi pas ?
Dessin côté DA avec mouvement relatif
Maintenant que nous avons trois côtés du carré dessinés, nous pouvons appliquer ce que nous avons appris pour dessiner le côté final.
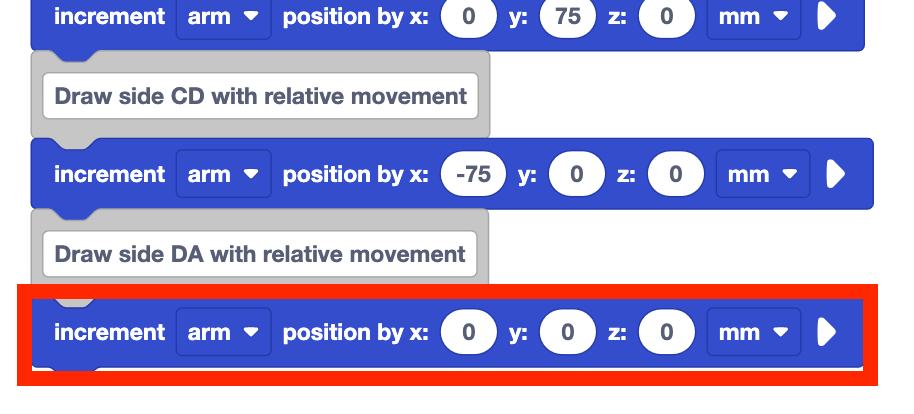
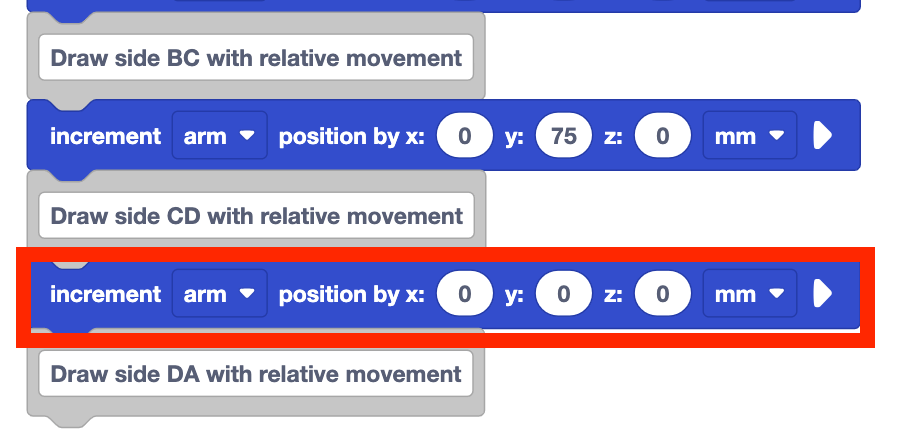
Ajouter un bloc de position d'incrément sous le commentaire « Dessiner côté DA avec mouvement relatif ».

Déterminez les paramètres du bloc de position Incrément.
Pour dessiner le côté DA, le bras à 6 axes se déplace à nouveau de 75 mm. En regardant la direction de ce mouvement en fonction de la position actuelle, le bras à 6 axes devra se déplacer à nouveau le long de l'axe y. Il n'a pas besoin de se déplacer le long des axes x ou z pour dessiner le côté DA.
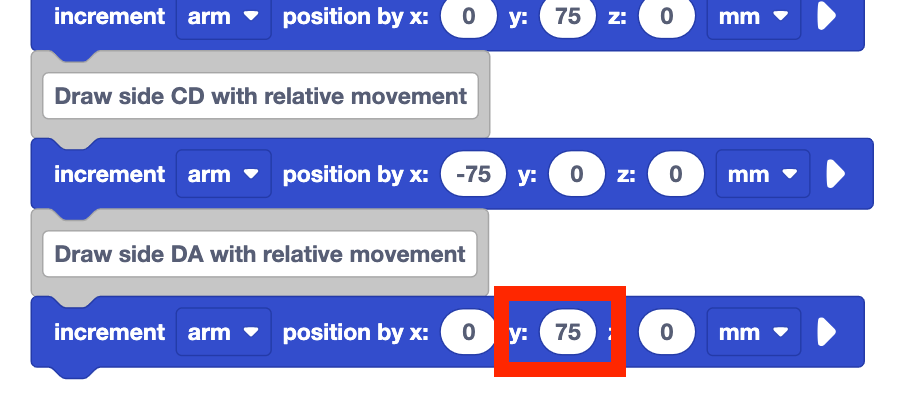
Réglez le paramètre y du bloc de position Incrément sur 75. Les paramètres x et z doivent rester à 0.
Prédisez comment le bras à 6 axes se déplacera et ce qu'il dessinera lorsque le projet sera exécuté. Enregistrez votre prévision dans votre cahier d'ingénierie.

Exécutez le projet et observez le comportement du bras à 6 axes.
Est-ce que ça bouge comme prévu ? Dessine-t-il le côté final du carré comme prévu ? Pourquoi ou pourquoi pas ?
Pour dessiner le côté DA comme prévu, le bras à 6 axes devait se déplacer dans la direction négative le long de l'axe y. Cependant, nous avons réglé le paramètre y sur 75 mm, ce qui indique que le bras à 6 axes doit se déplacer dans la direction positive le long de l'axe y.

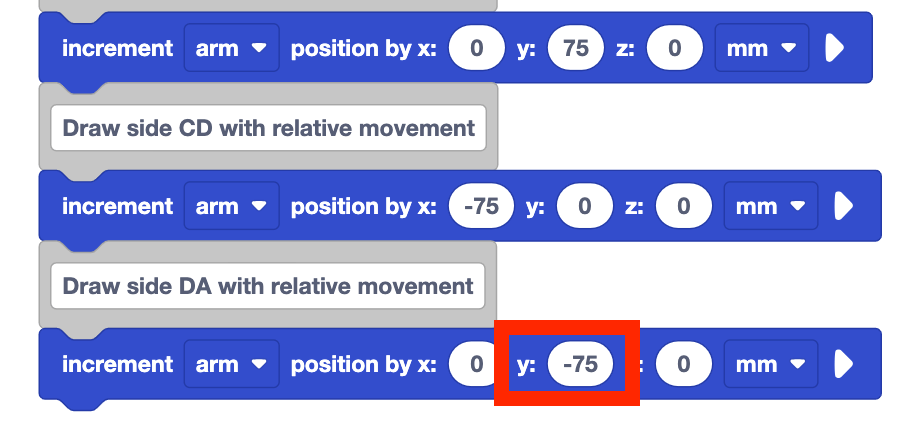
Réglez le paramètre y du bloc de position d'incrément final sur –75. Les paramètres x et z doivent rester à 0, car le bras à 6 axes n'a pas besoin de se déplacer sur ces axes pour dessiner le côté DA comme prévu.
Le bras à 6 axes doit maintenant se déplacer le long de l'axe des y dans la direction négative pour compléter le carré.
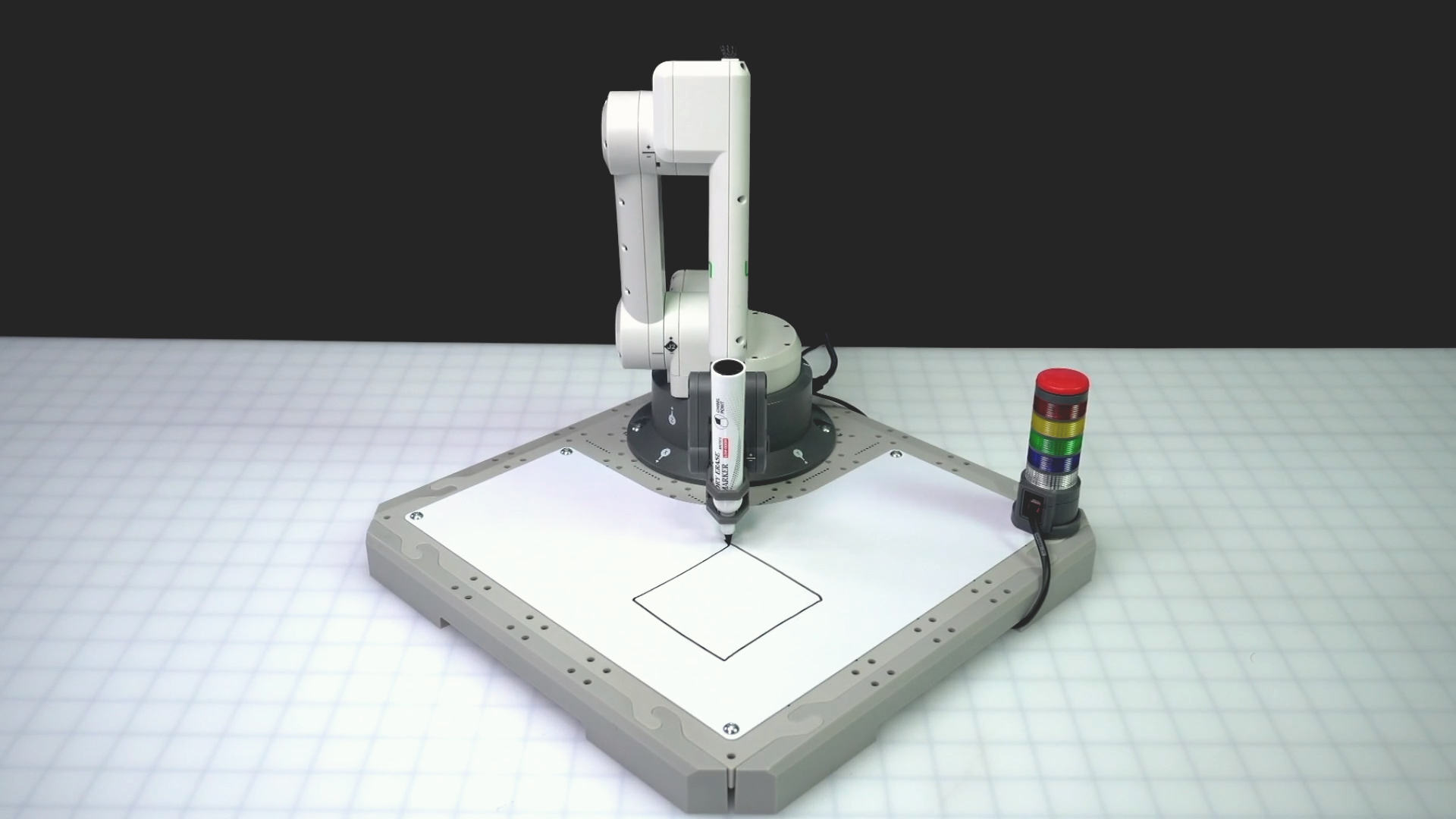
Exécutez le projet et observez le mouvement du bras à 6 axes.
Dessine-t-il le carré comme prévu ? Pourquoi ou pourquoi pas ?

N'oubliez pas de renommer et d'enregistrer votre projet.
Pourquoi utiliser le mouvement relatif ?
Bien que le mouvement du bras à 6 axes soit le même pour dessiner un carré de 75 mm avec un mouvement absolu et relatif, il y a une flexibilité et une facilité supplémentaires lorsque nous utilisons le mouvement relatif. Par exemple, si vous vouliez dessiner un carré de 75 mm à un endroit différent, que feriez-vous ? En utilisant le mouvement absolu, vous trouveriez les nouvelles coordonnées des quatre points et coderiez le bras à 6 axes pour les connecter. Cependant, en utilisant le mouvement relatif, vous n'avez besoin que de connaître la coordonnée de départ, et le reste reste reste le même.
Le mouvement absolu vous amènera toujours à la même coordonnée, quel que soit le lieu de départ. Ceci est utile lorsque vous devez déplacer le bras à 6 axes vers un emplacement spécifique pour démarrer un projet, ou pour vous assurer que vous pouvez atteindre cet emplacement indépendamment des coordonnées précédentes.
Le mouvement relatif se déplacera vers un nouvel emplacement en fonction de la position actuelle. Ceci est utile lorsque vous devez déplacer le bras à 6 axes par rapport à un emplacement connu, comme vous l'avez fait lors du dessin d'un carré ou pour vous déplacer selon un motif spécifique.
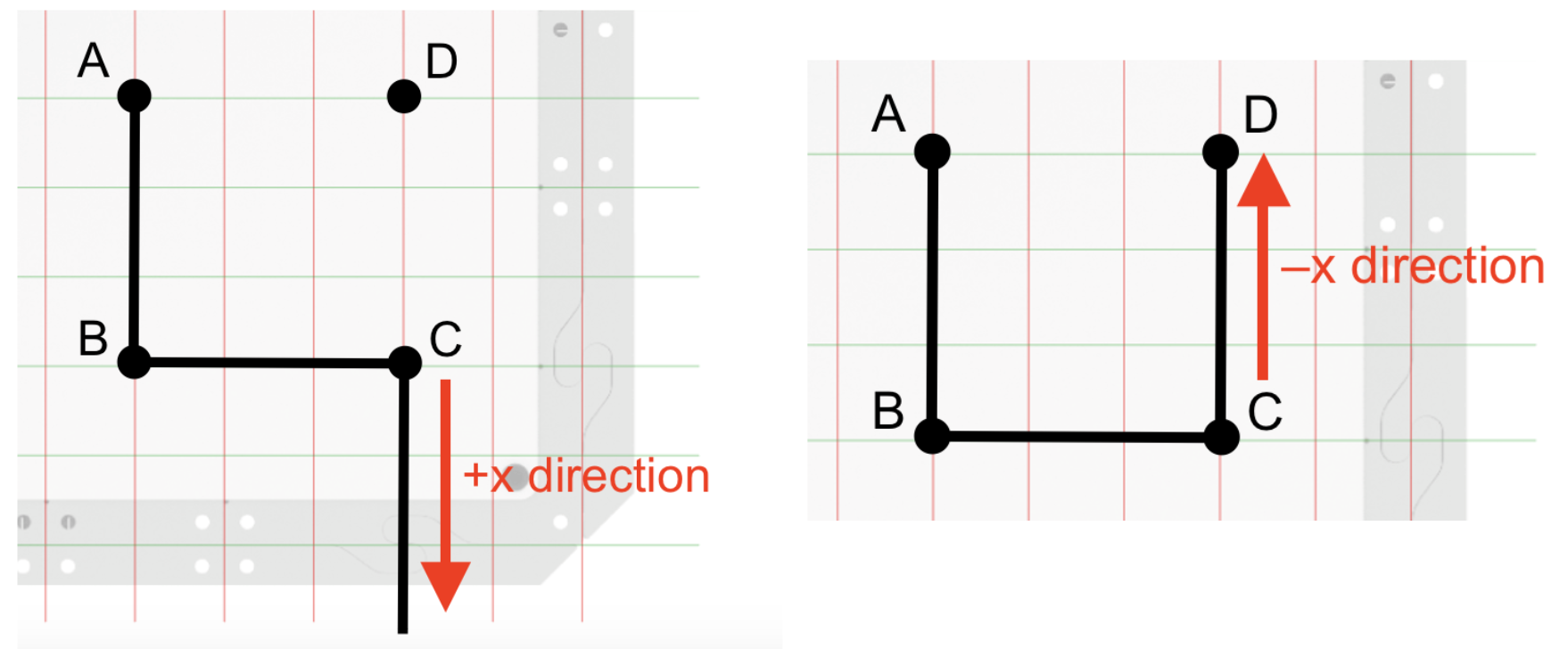
Les deux projets de cette leçon utilisaient les mêmes informations, mais la façon dont elles étaient utilisées dans le code était différente. Examinons nos projets plus en détail. L'image de gauche provient de notre projet de mouvement absolu. La longueur latérale de 75 mm correspond à la modification de la coordonnée x nécessaire pour se déplacer du point A au point B.
L'image de droite provient de notre projet de mouvement relatif. Ici, la longueur latérale de
75 mm correspond à la distance à laquelle le bras à 6 axes se déplace le long de l'axe
x. 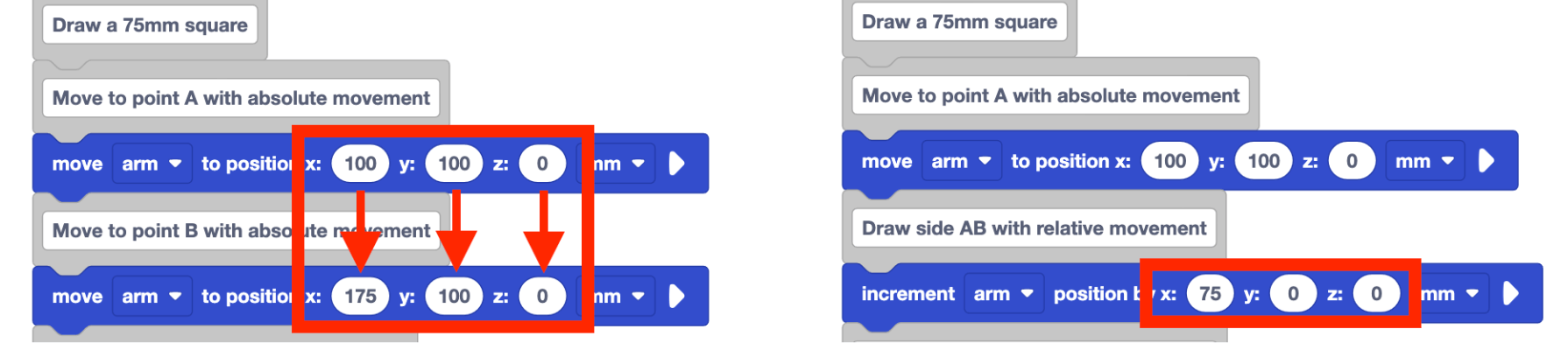
L'utilisation du mouvement relatif peut vous donner plus de flexibilité dans votre projet, alors simplifiez l'adaptation et l'ajustement de votre code à diverses fins.
Activité
Maintenant que vous avez codé le bras de l'axe à 6 axes pour qu'il se déplace en utilisant à
la fois le mouvement absolu et le mouvement relatif, il est temps de pratiquer ces
compétences. Dans cette activité, vous allez modifier votre projet pour coder le bras à 6
axes afin de dessiner trois carrés sur le tableau blanc. 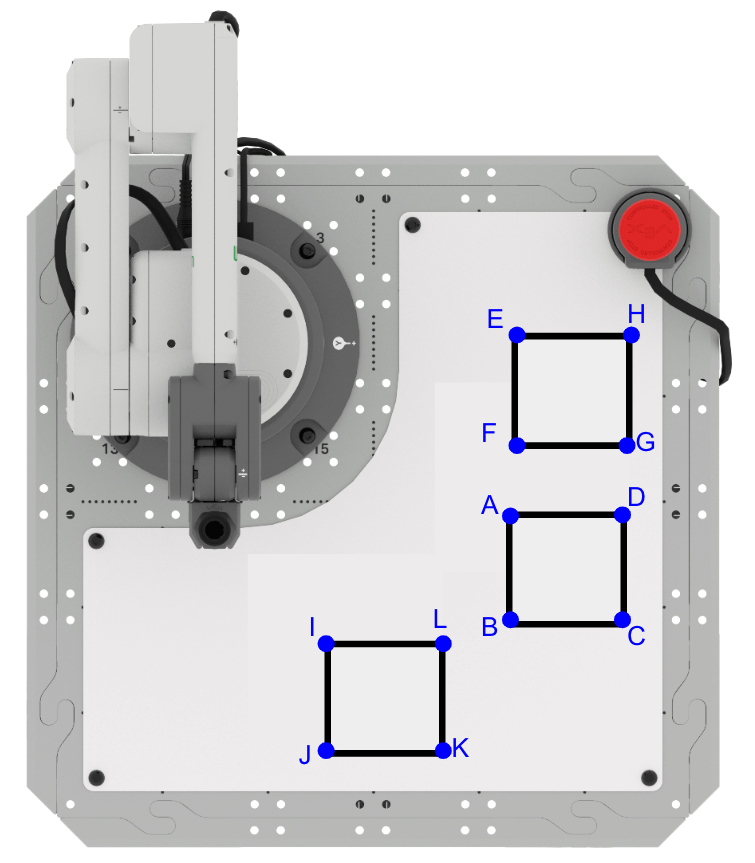
Configuration : enregistrez les informations suivantes dans votre carnet d'ingénierie.
- Les coordonnées de départ pour chaque carré sont les suivantes :
- Carré ABCD (100, 150, 0)
- EFGH carré (-5, 153, 0)
- Square IJKL (155, 57, 0)
- Toutes les longueurs latérales des trois carrés sont de 50 mm.
- Les carrés ne peuvent pas se toucher.
Activité : Tirez parti de votre projet de cette leçon pour coder le bras à 6 axes afin de dessiner deux carrés supplémentaires.
- Enregistrez un plan pour votre projet dans votre cahier d'ingénierie. Assurez-vous que votre groupe s'accorde sur le carré à dessiner en premier, deuxième et troisième, ainsi que sur les types de mouvements que vous utiliserez pour compléter les dessins.
- Tirez parti de votre projet de cette leçon pour suivre votre plan dans votre cahier d'ingénierie.
- Exécutez votre projet pour le tester. Assurez-vous que votre bras à 6 axes est connecté à VEXcode. Votre projet dessine-t-il les trois carrés comme prévu ? Pourquoi ou pourquoi pas ?
- Continuez à itérer sur votre projet jusqu'à ce que vous ayez réussi à dessiner les trois
carrés. Nommez et enregistrez votre projet lorsque vous avez terminé.
Vérifiez votre compréhension
Avant de commencer la prochaine leçon, assurez-vous de comprendre les concepts de cette leçon en répondant aux questions du document ci-dessous dans votre cahier d'ingénierie.
Vérifiez votre compréhension des questions > (Google Doc / .docx / .pdf)
Sélectionnez Suivant > pour passer à la leçon 2.