
تنافس
الآن بعد أن قمت بتشفير Clawbot الخاص بك للقيادة وتحريك المكعب، فأنت جاهز لتحدي الجامع!
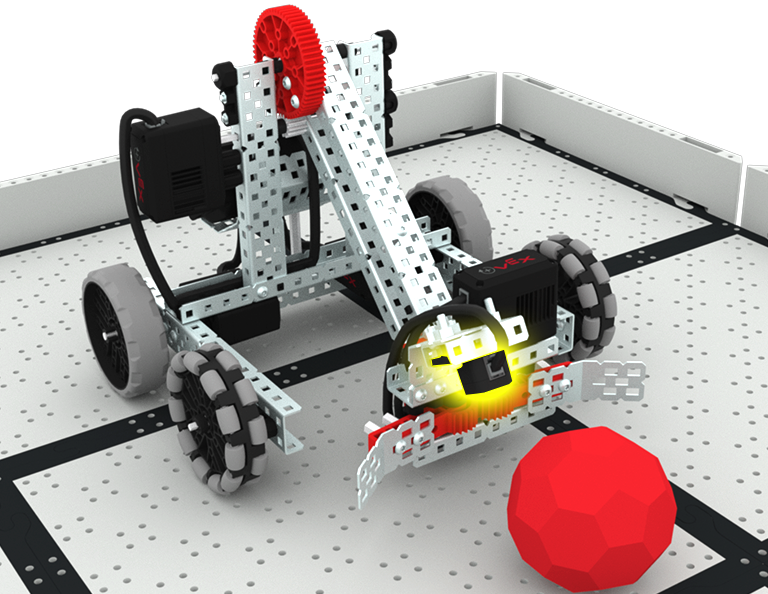
الهدف من هذا التحدي التجريبي الموقوت هو جعل روبوتك يقود بشكل مستقل ويجمع جميع كرات البوكي الثلاث في الملعب ويعيدها إلى منطقة البداية في أسرع وقت. شاهد الرسوم المتحركة أدناه لمشاهدة مثال على كيفية تحرك الروبوت الخاص بك في جولة ناجحة من التحدي.
اتبع الخطوات الواردة في هذا المستند لإكمال تحدي المُجمِّع.
بمجرد الانتهاء من تحدي الجامع، تحقق من معلمك. تأكد من توثيق نتائج التحدي في دفتر ملاحظاتك الهندسية.
التأمل الختامي
الآن بعد أن قمت بترميز Clawbot الخاص بك لقيادة وتحريك Buckyballs، وتنافست في تحدي Collector، فقد حان الوقت للتفكير في ما تعلمته وفعلته في هذا الدرس. ابدأ صفحة جديدة في دفتر ملاحظاتك الهندسي لبدء تفكيرك.
صنف نفسك كمبتدئ أو متدرب أو خبير في كل من المفاهيم التالية في دفتر ملاحظاتك الهندسية. قدم شرحًا موجزًا لسبب منحك لنفسك هذا التقييم لكل مفهوم:
- جمع البيانات واستخدامها (مثل المسافات) لتخطيط المشروع بشكل فعال
- استخدام كتل مجموعة الدفع والحركة في مشروع خبرة VEXcode لنقل Buckyballs باستخدام Clawbot
- صنع القرار التعاوني مع زملائي في الفريق
استخدم هذا الجدول لمساعدتك في تحديد الفئة التي تندرج تحتها.
| خبير | أشعر أنني فهمت المفهوم تمامًا ويمكنني تعليم هذا لشخص آخر. |
| متدرب | أشعر أنني فهمت المفهوم بما يكفي للتنافس في التحدي. |
| مبتدئ | أشعر أنني لم أفهم المفهوم ولا أعرف كيفية إكمال التحدي. |
ما هي الخطوة التالية ؟
في هذا الدرس، استخدمت VEXcode exp لترميز Clawbot الخاص بك لنقل ثلاث كرات Buckyballs.
في الدرس التالي، سوف:
- تعرف على المستشعر البصري وكيف يمكن استخدامه للكشف عن الألوان.
- أضف المستشعر البصري إلى الروبوت الخاص بك، وتعلم كيفية ترميزه باستخدام الكتل في VEXcode EXP.
- تنافس في تحدي محرك الكنز!
اختر < العودة إلى الدروس للعودة إلى نظرة عامة على الدرس.
حدد الدرس التالي للمتابعة > إلى الدرس 3، واستكشف كيف يمكن لإضافة مستشعر بصري تمكين Clawbot من اكتشاف الكائنات والألوان.