
Competir
Ahora que codificado tu Clawbot para que conduzca y movido un cubo, ¡estás listo para el desafío del !
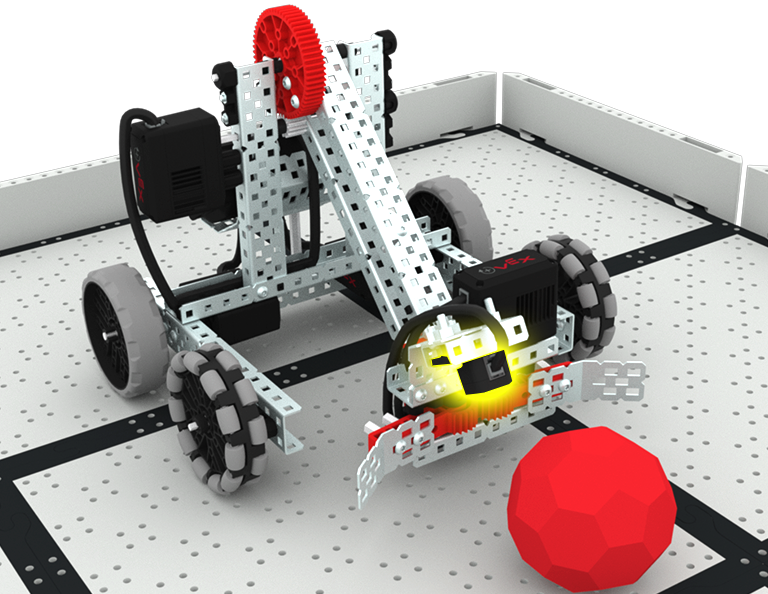
El objetivo de este desafío de prueba contrarreloj es tu robot conduzca de forma autónoma y recoja las tres Buckyballs en el campo y las devuelva a la zona de inicio en el tiempo más rápido. Mira la animación a continuación para ver un ejemplo de cómo tu robot podría moverse en una ejecución exitosa del desafío.
En esta animación, el Clawbot comienza en la esquina inferior izquierda del campo, directamente opuesto a la primera Buckyball roja. Cerca de la pared opuesta, se colocan Buckyballs rojos en las intersecciones de las líneas negras. El robot avanza, agarra la primera Buckyball, retrocede y luego gira para regresar a su ubicación inicial y colocar la Buckyball en la pared cercana. Repite este comportamiento para las otras dos Buckyballs, moviéndose de izquierda a derecha para mover las tres. A medida que cada cubo se mueve con éxito, se marca a un lado y el cronómetro funciona durante todo el proyecto, aproximadamente 27 segundos.
Siga los pasos de este documento para completar el desafío del coleccionista.
Una vez que hayas completado el desafío de coleccionista, consulta con tu profesor. Asegúrese de haber documentado los resultados del desafío en su cuaderno de ingeniería.
Reflexión final
Ahora que has codificado tu Clawbot para conducir y mover Buckyballs, y has competido en el Desafío de coleccionista, es hora de reflexionar sobre lo que has aprendido y hecho en esta lección. Comienza una nueva página en tu cuaderno de ingeniería para comenzar tu reflexión.
Califícate como novato, aprendiz o experto en cada uno de los siguientes conceptos en tu cuaderno de ingeniería. Proporcione una breve explicación de por qué se dio esa calificación para cada concepto:
- Recopilar y utilizar datos (como distancias) para planificar un proyecto de manera eficaz
- Uso de bloques de transmisión y movimiento en un proyecto EXP de VEXcode para mover Buckyballs con Clawbot
- Toma de decisiones colaborativa con mis compañeros de equipo
Utilice esta tabla para ayudarle a determinar en qué categoría se encuentra.
| Experto | Siento que entendí completamente el concepto y podría enseñárselo a otra persona. |
| Aprendiz | Siento que entendí el concepto lo suficiente para competir en el desafío. |
| Principiante | Siento que no entendí el concepto y no sé cómo completar el desafío. |
¿Qué sigue?
En esta lección, usaste VEXcode EXP para codificar tu Clawbot para mover tres Buckyballs.
En la próxima lección, usted:
- Aprenda sobre el sensor óptico y cómo se puede utilizar para detectar colores.
- Añade el sensor óptico a tu robot y aprende a codificarlo usando bloques en VEXcode EXP.
- ¡Compite en el desafío Treasure Mover!
Seleccione < Regresar a las lecciones para regresar a la descripción general de las lecciones.
Seleccione Siguiente Lección > para continuar con la Lección 3 y explorar cómo agregar un sensor óptico puede permitir que su Clawbot detecte objetos y colores.