
![]() صندوق أدوات المعلم
-
مخطط النشاط
صندوق أدوات المعلم
-
مخطط النشاط
-
سيعمل هذا الاستكشاف على تعريف الطلاب بالسلوكيات الأساسية للبرمجة للأمام وللخلف وللانتظار.
-
يتيح استخدام مشروع قالب V5 Speedbot (Drivetrain 2-motors, No Gyro) للطلاب برمجة Speedbot للتحرك للأمام بمجرد تحديد كتلة [Drive for] .
أصبح Speedbot جاهزًا للتحرك!
سيمنحك هذا الاستكشاف الأدوات التي ستمكنك من البدء في إنشاء بعض المشاريع الرائعة التي سيتبعها Speedbot الخاص بك.
- VEXcode V5 الذي سيتم استخدامه في هذا الاستكشاف:


- تأكد من أن لديك الأجهزة المطلوبة ودفتر الهندسة الخاص بك وبرنامج VEXcode V5 الذي تم تنزيله وأنك جاهز.
![]() نصائح للمعلم
نصائح للمعلم
إذا كانت هذه هي المرة الأولى التي يستخدم فيها الطالب VEXcode V5، فيمكنه الرجوع إلى البرامج التعليمية في أي وقت أثناء هذا الاستكشاف. تتواجد البرامج التعليمية في شريط الأدوات.

| كمية | المواد المطلوبة |
|---|---|
| 1 |
روبوت سبيدبوت |
| 1 |
بطارية الروبوت المشحونة |
| 1 |
كود VEX الإصدار 5 |
| 1 |
كابل USB (إذا كنت تستخدم جهاز كمبيوتر) |
| 1 |
دفتر الهندسة |
![]() نصائح للمعلم
نصائح للمعلم
قم بعمل نموذج لكل خطوة من خطوات استكشاف الأخطاء وإصلاحها للطلاب.
الخطوة 2: بدء مشروع جديد
قبل أن تبدأ مشروعك، حدد مشروع قالب Speedbot (Drivetrain 2-Motors, No Gyro). يحتوي مشروع القالب على تكوين محرك Speedbot. إذا لم يتم استخدام القالب، فلن يقوم الروبوت الخاص بك بتشغيل المشروع بشكل صحيح.

أكمل الخطوات التالية:
- افتح قائمة الملف.
- إختر مفتوح أمثلة.

- قم بتحديد مشروع قالب Speedbot (Drivetrain 2-motors, No Gyro) وافتحه.
- نظرًا لأننا سنستخدم محرك الأقراص للكتلة ، فقم بإعادة تسمية مشروعك إلى Drive.
- احفظ مشروعك.
- تأكد من أن اسم المشروع Drive موجود الآن في النافذة الموجودة في منتصف شريط الأدوات.

![]() نصائح للمعلم
نصائح للمعلم
-
نظرًا لأن هذا نشاط تمهيدي في البرمجة، فيجب على المعلم أن يقوم بنمذجة الخطوات، ثم يطلب من الطلاب إكمال نفس الإجراءات. يجب على المعلم بعد ذلك مراقبة الطلاب للتأكد من أنهم يتبعون الخطوات بشكل صحيح.
-
تأكد من أن الطلاب قد اختاروا فتح الأمثلة من قائمة الملف.
-
تأكد من أن الطلاب قد اختاروا مشروع قالب Speedbot (Drivetrain 2-motors, No Gyro).
يمكنك الإشارة للطلاب إلى وجود العديد من الاختيارات التي يمكنهم الاختيار من بينها في صفحة Open Examples . مع قيامهم ببناء واستخدام الروبوتات الأخرى، سيكون لديهم فرصة لاستخدام قوالب مختلفة.
-
يمكنك أن تطلب من الطلاب إضافة الأحرف الأولى من أسمائهم أو اسم مجموعتهم إلى اسم المشروع. سيساعدك هذا على التمييز بين المشاريع إذا طلبت من الطلاب تقديمها.
![]() صندوق أدوات المعلم
-
حفظ المشاريع
صندوق أدوات المعلم
-
حفظ المشاريع
أشر إلى أنه عند فتح VEXcode V5 لأول مرة، تم تسمية النافذة بـ VEXcode Project ولم يتم حفظها (كما هو موضح على شريط الأدوات). مشروع VEXcode هو اسم المشروع الافتراضي عند فتح VEXcode V5 لأول مرة. بمجرد إعادة تسمية المشروع إلى Drive وحفظه، تم تحديث العرض إلى "محفوظ". باستخدام هذه النافذة في شريط الأدوات، من السهل التأكد من أن الطلاب يستخدمون المشروع الصحيح وتم حفظه.
بمجرد حفظ المشروع مبدئيًا، يقوم VEXcode V5 بحفظ أي تغييرات لاحقة تلقائيًا، كما هو موضح بواسطة الرسالة الموجودة بجوار اسم المشروع.
أخبر الطلاب أنهم الآن مستعدون لبدء مشروعهم الأول. اشرح للطلاب أنه بمجرد اتباع بعض الخطوات البسيطة، سيتمكنون من إنشاء وتشغيل مشروع من شأنه دفع Speedbot إلى الأمام.
![]() صندوق أدوات المعلم
-
توقف وناقش
صندوق أدوات المعلم
-
توقف وناقش
هذه نقطة جيدة للتوقف مؤقتًا وجعل الطلاب يراجعون الخطوات التي أكملوها للتو عند بدء مشروع جديد في VEXcode V5 بشكل فردي أو في مجموعات. اطلب من الطلاب أن يفكروا بشكل فردي قبل المشاركة داخل مجموعتهم أو مع الفصل بأكمله.
الخطوة 3: المضي قدما
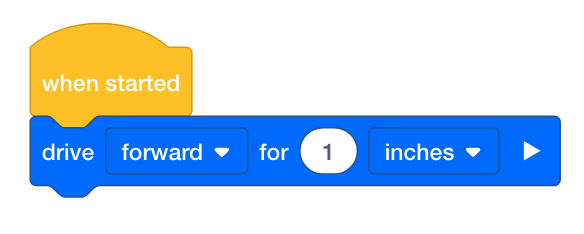
- أضف كتلة [Drive for] إلى الكتلة {When started} في منطقة البرمجة.

- حدد القائمة المنسدلة وقم بتغيير الوحدات من البوصات إلى المليمترات.

- تغيير المسافة من 1 ملم إلى 100 ملم.

- انقر على أيقونة فتحة . يمكنك تنزيل مشروعك على إحدى الفتحات الأربعة المتاحة في Robot Brain. انقر على الرقم 1.

- قم بتوصيل الروبوت بالكمبيوتر أو الجهاز اللوحي الخاص بك. يتحول لون أيقونة الدماغ في شريط الأدوات إلى اللون الأخضر بمجرد إجراء اتصال ناجح.

- انقر فوق الزر تنزيل على شريط الأدوات لتنزيل مشروع Drive إلى Robot Brain.
![]() صندوق أدوات المعلم
-
مساعدة في الكتل
صندوق أدوات المعلم
-
مساعدة في الكتل
-
أشر إلى أنه في منطقة البرمجة، يوجد بالفعل كتلة {When started} تقع هناك بشكل افتراضي. كل مشروع سيبدأ بهذه الكتلة. عند بدء المشروع، سيتم اتباع الكتل المتصلة بالترتيب الذي تم وضعها فيه.
قم بإظهار النقر على كتلة [Drive for] وسحبها إلى منطقة البرمجة، وتوصيلها بالكتلة {When started}. سوف تسمع صوت نقرة عند تثبيته.
-
إذا كنت تستخدم جهاز كمبيوتر، فيجب أن يكون لدى الطالب VEX V5 Robot Brain متصلاً بالكمبيوتر باستخدام كابل USB . إذا كنت تستخدم جهازًا لوحيًا، فيجب توصيل روبوت VEX V5 بالجهاز اللوحي باستخدام Smart Radio.
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، اطلب منهم الآن فصل كابل USB عن دماغ الروبوت. قد يؤدي توصيل الروبوت بالكمبيوتر أثناء تشغيل مشروع ما إلى قيام الروبوت بسحب كابل الاتصال.
![]() صندوق أدوات المعلم
-
توقف وناقش
صندوق أدوات المعلم
-
توقف وناقش
اطلب من الطلاب التنبؤ بما يعتقدون أنه سيحدث عند تنزيل هذا المشروع وتشغيله على Speedbot. اطلب من الطلاب أن يسجلوا توقعاتهم في دفاتر الهندسة الخاصة بهم. إذا سمح الوقت، اطلب من كل مجموعة مشاركة توقعاتها.

![]() صندوق أدوات المعلم
-
النموذج الأول
صندوق أدوات المعلم
-
النموذج الأول
نموذج تنفيذ المشروع أمام الفصل قبل أن يحاول جميع الطلاب تنفيذه مرة واحدة. اجمع الطلاب في منطقة واحدة واترك مساحة كافية لحركة Speedbot إذا تم وضعه على الأرض.
أخبر الطلاب أنه دورهم الآن لتشغيل مشروعهم. تأكد من أن لديهم مسارًا واضحًا وأنه لن يصطدم Speedbots ببعضهم البعض.
- قم بتشغيل المشروع على روبوت Speedbot من خلال التأكد من تحديد المشروع ثم اضغط على زر التشغيل في Robot Brain. أهنئك على إنشاء مشروعك الأول!
الخطوة 4: القيادة في الاتجاه المعاكس

- قم بتغيير كتلة [القيادة من أجل] لعرض عكسي بدلاً من أمامي.
- تحميل المشروع.
- قم بتشغيل المشروع على روبوت Speedbot من خلال التأكد من تحديد المشروع ثم اضغط على زر التشغيل في Robot Brain.
![]() صندوق أدوات المعلم
-
إكمال الخطوة 4
صندوق أدوات المعلم
-
إكمال الخطوة 4
-
لتغيير كتلة [القيادة من] من للأمام إلى للخلف، ما عليك سوى النقر فوق القائمة المنسدلة وتحديد للخلف.
-
يمكن تغيير عدد المليمترات، ولكن في هذا المثال سنتركها عند 100 ملم كما تم تحديدها في الخطوة السابقة.
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، اطلب منهم تذكيرهم بفصل كابل USB عن Robot Brain قبل تشغيل المشروع.
-
نظرًا لأننا لا نختار فتحة جديدة، فسيتم تنزيل المشروع الجديد إلى الفتحة 1 واستبدال المشروع السابق.
-
نظرًا لأن VEXcode V5 يتميز بميزة الحفظ التلقائي، فلا توجد حاجة لحفظ المشروع مرة أخرى.
الخطوة 5: انتظر ثم قم بالقيادة للخلف

![]() صندوق أدوات المعلم
-
إكمال الخطوة 5
صندوق أدوات المعلم
-
إكمال الخطوة 5
-
يمكن وضع كتلة [انتظار] في أي مكان في المشروع. لمزيد من المعلومات حول الكتلة [انتظر] ، افتح تعليمات.
-
لن يؤدي استخدام كتلة [انتظار] إلى إنهاء المشروع.
-
إذا كان الطلاب يستخدمون جهاز كمبيوتر، اطلب منهم تذكيرهم بفصل كابل USB عن Robot Brain قبل تشغيل المشروع.
-
نظرًا لأننا لا نختار فتحة جديدة، فسيتم تنزيل المشروع الجديد إلى الفتحة 1 واستبدال المشروع السابق.
-
نظرًا لأن VEXcode V5 يتميز بميزة الحفظ التلقائي، فلا توجد حاجة لحفظ المشروع مرة أخرى.
الخطوة 6: أكمل تحدي تدريبات كرة السلة!
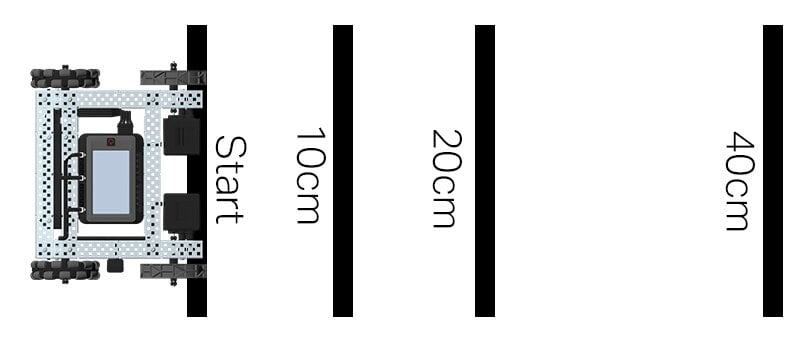
في تحدي تدريبات كرة السلة، يجب أن يكون الروبوت قادرًا على التنقل عبر سلسلة من الخطوط على مسافات مختلفة. سيتحرك الروبوت للأمام إلى الخط الأول الذي يبعد 10 سم عن موضع البداية، وينتظر لمدة ثانية واحدة، ثم يتحرك للخلف للعودة إلى نفس الخط. ثم يقوم الروبوت بتكرار الحركة عن طريق القيادة للأمام مسافة 20 سم إلى الخط الثاني، والانتظار لمدة ثانية واحدة، ثم القيادة للخلف إلى خط البداية الأصلي. سيتحرك الروبوت للأمام إلى الخط الثالث بمسافة 40 سم، وينتظر لمدة ثانية واحدة، ثم يعود أخيرًا إلى خط البداية لإنهاء التحدي.
قبل برمجة الروبوت، خطط لمسار الروبوت وسلوكياته في دفتر ملاحظاتك الهندسية.
بعد إكمال تحدي كرة السلة، ستتمكن من الجمع بين الحركات الأمامية والخلفية مع سلوكيات الروبوت الإضافية لإكمال تحديات أكثر تقدمًا.
ضع في اعتبارك عند البرمجة أن 1 سم = 10 مم
![]() نصائح للمعلم
نصائح للمعلم
تأكد من أن الروبوت أكمل التحدي بنجاح عن طريق استخدام عصا القياس أو المسطرة والشريط لتحديد موضع البداية للروبوت. ثم قم بوضع علامة على مسافة 10 ملم، و20 ملم، و40 ملم من موضع البداية كمرجع إلى المكان الذي يحتاج الروبوت إلى التحرك إليه لإكمال التحدي.
![]() صندوق أدوات المعلم
-
توقف وناقش
صندوق أدوات المعلم
-
توقف وناقش
اطلب من الطلاب مشاركة حلولهم في أزواج قبل مناقشتها كفصل كامل. تسهيل المناقشة عن طريق طرح الأسئلة التالية:
-
هل واجهت أي صعوبات أثناء برمجة هذا التحدي؟
-
هل تصرف الروبوت الخاص بك كما توقعت بناءً على مشروعك؟ لماذا أو لماذا لا؟
-
إذا كان بإمكانك القيام بالتحدي مرة أخرى، هل هناك أي شيء كنت ستفعله بشكل مختلف؟
