
![]() Zestaw narzędzi dla nauczyciela
-
Zarys ćwiczeń
Zestaw narzędzi dla nauczyciela
-
Zarys ćwiczeń
-
Podczas tej eksploracji uczestnicy kursu zapoznają się z podstawowymi zachowaniami programistycznymi związanymi z jazdą do przodu, do tyłu i oczekiwaniem.
-
Korzystanie z projektu szablonowego V5 Speedbot (2 silniki układu napędowego, bez żyroskopu) umożliwia uczniom zaprogramowanie Speedbota tak, aby poruszał się do przodu, po prostu wybierając blok [Drive for] .
Speedbot jest gotowy do ruchu!
Dzięki tej eksploracji zdobędziesz narzędzia umożliwiające rozpoczęcie tworzenia fajnych projektów, które będzie mógł śledzić Twój Speedbot.
-
VEXcode V5, który będzie używany w tej eksploracji:

-
Aby dowiedzieć się więcej o bloku, otwórz Pomoc , a następnie wybierz blok [Jedź do] .

-
Upewnij się, że masz wymagany sprzęt, swój notatnik inżynierski i VEXcode V5 pobrany i gotowy.
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Jeśli uczeń po raz pierwszy korzysta z VEXcode V5, może w każdej chwili skorzystać z Samouczków. Samouczki znajdują się na pasku narzędzi.

| Ilość | Potrzebne materiały |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Naładowany akumulator robota |
| 1 |
Kod VEX V5 |
| 1 |
Kabel USB (w przypadku korzystania z komputera) |
| 1 |
Notatnik inżynieryjny |
Krok 1: Przygotowanie do eksploracji
Czy zanim rozpoczniesz ćwiczenie, masz gotowy każdy z tych elementów? Sprawdź każdy z poniższych elementów:
-
Czy silniki są podłączone do właściwych portów?
-
Czy inteligentne kable są całkowicie włożone do wszystkich silników?
-
Czy Brain jest włączony?
-
Czy akumulator jest naładowany?
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Modeluj każdy etap rozwiązywania problemów dla uczniów.
Krok 2: Rozpocznij nowy projekt
Przed rozpoczęciem projektu wybierz projekt szablonu Speedbot (Drivetrain 2-Motors, No Gyro). Projekt szablonu zawiera konfigurację silnika Speedbota. Jeśli szablon nie zostanie użyty, Twój robot nie uruchomi poprawnie projektu.

Wykonaj następujące kroki:
-
Otwórz menu Plik.
-
Wybierz Otwórz Przykłady.
-
Wybierz i otwórz projekt szablonu Speedbot (2 silniki układu napędowego, bez żyroskopu).
-
Ponieważ będziemy używać dysku dla bloku, zmień nazwę swojego projektu Drive.
-
Zapisz swój projekt.
-
Sprawdź, czy nazwa projektu Drive znajduje się teraz w oknie na środku paska narzędzi.

![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
-
Ponieważ jest to początek zajęć z programowaniem, nauczyciel powinien modelować poszczególne kroki, a następnie poprosić uczniów o wykonanie tych samych czynności. Następnie nauczyciel powinien monitorować uczniów, aby upewnić się, że prawidłowo wykonują podane czynności.
-
Upewnij się, że uczniowie wybrali opcję Otwarte przykłady z menu Plik.
-
Upewnij się, że uczniowie wybrali projekt szablonowy Speedbot (2 silniki układu napędowego, bez żyroskopu).
Możesz wskazać uczniom, że na stronie Otwórz Przykłady jest kilka opcji do wyboru. Budując i używając innych robotów, będą mieli okazję korzystać z różnych szablonów.
-
Możesz poprosić uczniów o dodanie swoich inicjałów lub nazwy grupy do nazwy projektu. Pomoże to rozróżnić projekty, jeśli poprosisz uczniów o ich przesłanie.
![]() Przybornik nauczyciela
-
Zapisywanie projektów
Przybornik nauczyciela
-
Zapisywanie projektów
Zwróć uwagę, że kiedy po raz pierwszy otworzyli VEXcode V5, okno miało etykietę VEXcode Project i nie zostało zapisane (wskazane na pasku narzędzi). Projekt VEXcode jest domyślną nazwą projektu przy pierwszym otwarciu VEXcode V5. Po zmianie nazwy projektu na Dysk i zapisaniu jego zawartość została zmieniona na Zapisano. Korzystając z tego okna na pasku narzędzi, można łatwo sprawdzić, czy uczniowie korzystają z właściwego projektu i czy został on zapisany.
Po wstępnym zapisaniu projektu VEXcode V5 automatycznie zapisuje wszelkie późniejsze zmiany, jak wskazuje komunikat obok nazwy projektu.
Powiedz uczniom, że są teraz gotowi, aby rozpocząć swój pierwszy projekt. Wyjaśnij uczniom, że wykonując kilka prostych kroków, będą w stanie stworzyć i uruchomić projekt, który popchnie Speedbota do przodu.
![]() Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Jest to dobry moment na przerwę i poproszenie uczniów o przejrzenie, indywidualnie lub w grupach, kroków, które właśnie zostały wykonane podczas rozpoczynania nowego projektu w VEXcode V5. Poproś uczniów, aby zastanowili się indywidualnie, zanim podzielą się informacjami w swojej grupie lub całej klasie.
Krok 3: Jedź do przodu
-
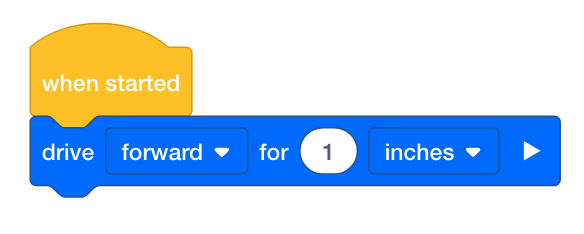
Dodaj blok [Drive for] do bloku {When started} w obszarze programowania.

-
Wybierz menu rozwijane i zmień jednostki z cali na milimetry.

-
Zmień odległość z 1 mm na 100 mm.

-
Kliknij ikonę Slot . Możesz pobrać swój projekt do jednego z czterech dostępnych miejsc w Robot Brain. Kliknij cyfrę 1.

-
Podłącz robota do komputera lub tabletu. Po pomyślnym nawiązaniu połączenia ikona Brain na pasku narzędzi zmieni kolor na zielony.

-
Kliknij przycisk Pobierz na pasku narzędzi, aby pobrać projekt Drive do Robot Brain.
![]() Przybornik nauczyciela
-
Pomoc dotycząca bloków
Przybornik nauczyciela
-
Pomoc dotycząca bloków
-
Zwróć uwagę, że w obszarze programowania domyślnie znajduje się już blok {When started}. Każdy projekt zaczyna się od tego bloku. Po rozpoczęciu projektu połączone bloki będą śledzone w kolejności, w jakiej zostały ułożone.
Zademonstruj kliknięcie bloku [Drive for] i przeciągnięcie go do obszaru programowania, łącząc go z blokiem {When started}. Podczas mocowania usłyszysz kliknięcie.
-
Jeśli korzystasz z komputera, uczeń powinien mieć VEX V5 Robot Brain podłączony do komputera za pomocą kabla USB . Jeśli korzystasz z tabletu, VEX V5 Robot Brain należy połączyć z tabletem za pomocą Smart Radio.
-
Jeśli uczniowie korzystają z komputera, poproś ich teraz o odłączenie kabla USB od Robot Brain. Podłączenie robota do komputera podczas wykonywania projektu może spowodować, że robot będzie ciągnął za kabel połączeniowy.
![]() Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Poproś uczniów, aby przewidzieli, co ich zdaniem się stanie, gdy projekt zostanie pobrany i uruchomiony w Speedbocie. Powiedz uczniom, aby zapisali swoje przewidywania w zeszytach inżynierskich. Jeśli czas na to pozwala, poproś każdą grupę o podzielenie się swoją prognozą.

![]() Przybornik nauczyciela
-
Model First
Przybornik nauczyciela
-
Model First
Modeluj uruchamianie projektu przed klasą, zanim wszyscy uczniowie spróbują jednocześnie. Zbierz uczniów w jednym miejscu i zostaw wystarczająco dużo miejsca, aby Speedbot mógł się poruszać, jeśli zostanie umieszczony na podłodze.
Powiedz uczniom, że teraz ich kolej na realizację projektu. Upewnij się, że mają wolną drogę i że żadne Speedboty nie wpadną na siebie.
-
Uruchom projekt na robocie Speedbot, upewniając się, że projekt jest wybrany, a następnie naciśnij przycisk Uruchom na Robot Brain. Gratulujemy stworzenia pierwszego projektu!
Krok 4: Jedź wstecz

![]() Zestaw narzędzi nauczyciela
-
Ukończenie kroku 4
Zestaw narzędzi nauczyciela
-
Ukończenie kroku 4
-
Aby zmienić blok [Jedź na] z do przodu do do tyłu, po prostu kliknij menu rozwijane i wybierz do tyłu.
-
Liczbę mm można zmienić, ale w tym przykładzie pozostawimy ją na poziomie 100 mm, zgodnie z ustawieniem w poprzednim kroku.
-
Jeśli uczniowie korzystają z komputera, poproś ich o odłączenie kabla USB od Robot Brain przed rozpoczęciem projektu.
-
Ponieważ nie wybieramy nowego slotu, nowy projekt zostanie pobrany do slotu 1 i zastąpi poprzedni projekt.
-
Ponieważ VEXcode V5 posiada funkcję automatycznego zapisywania, nie ma potrzeby ponownego zapisywania projektu.
Krok 5: Poczekaj, a następnie wjedź wstecz

-
Dodaj blok [Czekaj] przed blokiem [Jedź przez] . Spowoduje to, że robot zaczeka przed jazdą do tyłu.
-
Wstaw trzy sekundy do bloku [Wait] . To każe robotowi odczekać trzy sekundy przed jazdą do tyłu.
-
Pobierz projekt.
-
Uruchom projekt na robocie Speedbot, upewniając się, że projekt jest wybrany, a następnie naciśnij przycisk Uruchom.
![]() Zestaw narzędzi nauczyciela
-
Ukończenie kroku 5
Zestaw narzędzi nauczyciela
-
Ukończenie kroku 5
-
Blok [Wait] można umieścić w dowolnym miejscu projektu. Aby uzyskać więcej informacji na temat bloku [Czekaj] , otwórz Pomoc.
-
Użycie bloku [Wait] nie zakończy projektu.
-
Jeśli uczniowie korzystają z komputera, poproś ich o odłączenie kabla USB od Robot Brain przed rozpoczęciem projektu.
-
Ponieważ nie wybieramy nowego slotu, nowy projekt zostanie pobrany do slotu 1 i zastąpi poprzedni projekt.
-
Ponieważ VEXcode V5 posiada funkcję automatycznego zapisywania, nie ma potrzeby ponownego zapisywania projektu.
Krok 6: Ukończ wyzwanie ćwiczeń koszykarskich!
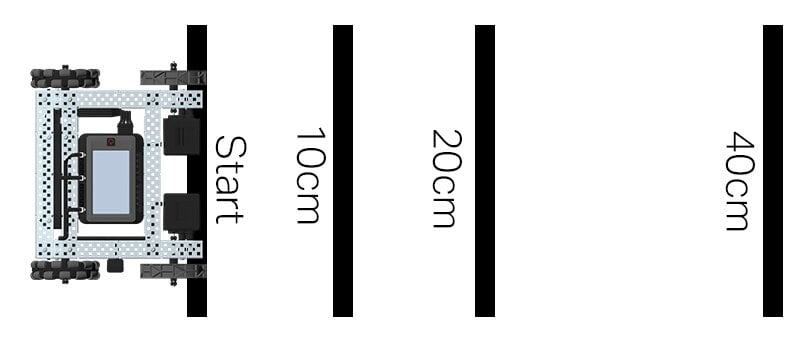
W wyzwaniu Basketball Drills Challenge robot musi być w stanie poruszać się po szeregu linii w różnych odległościach. Robot przejedzie do przodu do pierwszej linii znajdującej się 10 cm od pozycji wyjściowej, odczeka 1 sekundę, a następnie cofnie się, wracając do tej samej linii. Następnie robot powtórzy czynność, podjeżdżając 20 cm do przodu do drugiej linii, odczekuje 1 sekundę, a następnie cofa się do pierwotnej linii startu. Robot podjedzie do trzeciej linii z odległości 40 cm, odczeka 1 sekundę, a następnie na koniec wróci na linię startu, aby zakończyć wyzwanie.
Przed zaprogramowaniem robota zaplanuj w swoim notatniku inżynierskim ścieżkę robota i jego zachowania.
Po ukończeniu wyzwania koszykarskiego będziesz mógł łączyć ruchy do przodu i do tyłu z dodatkowymi zachowaniami robota, aby ukończyć jeszcze bardziej zaawansowane wyzwania.
Podczas programowania należy pamiętać, że 1 cm = 10 mm
![]() Wskazówki dla nauczycieli
Wskazówki dla nauczycieli
Sprawdź, czy robot pomyślnie ukończył wyzwanie, używając miernika lub linijki i taśmy, aby oznaczyć pozycję początkową robota. Następnie zaznacz 10 mm, 20 mm i 40 mm od tej pozycji początkowej jako odniesienie do miejsca, w którym robot musi się poruszyć, aby ukończyć wyzwanie.
![]() Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Zestaw narzędzi dla nauczyciela
-
Zatrzymaj się i porozmawiaj
Poproś uczniów, aby podzielili się swoimi rozwiązaniami w parach, zanim omówią je w całej klasie. Uprość dyskusję, pytając:
-
Czy napotkałeś jakieś trudności podczas programowania tego wyzwania?
-
Czy Twój robot zachowywał się tak, jak tego oczekiwałeś na podstawie projektu? Dlaczego lub dlaczego nie?
-
Gdybyś mógł podjąć wyzwanie jeszcze raz, czy jest coś, co zrobiłbyś inaczej?
