
![]() Boîte à outils de l'enseignant
-
Plan d'activité
Boîte à outils de l'enseignant
-
Plan d'activité
-
Cette exploration présentera aux élèves les comportements de base de la programmation en marche avant, en marche arrière et en attente.
-
L'utilisation du projet modèle V5 Speedbot (transmission à 2 moteurs, sans gyroscope) permet aux élèves de programmer le Speedbot pour qu'il avance en sélectionnant simplement le bloc [Conduire pour] .
Le Speedbot est prêt à bouger !
Cette exploration vous donnera les outils pour pouvoir commencer à créer des projets intéressants à suivre pour votre Speedbot.
- VEXcode V5 qui sera utilisé dans cette exploration :


- Assurez-vous d'avoir le matériel requis, votre cahier d'ingénierie et VEXcode V5 téléchargé et prêt.
![]() Conseils pour les enseignants
Conseils pour les enseignants
Si c'est la première fois que l'étudiant utilise VEXcode V5, il peut se référer aux tutoriels à tout moment au cours de cette exploration. Les tutoriels sont situés dans la barre d'outils.

| Quantité | Matériel nécessaire |
|---|---|
| 1 |
Robot Speedbot |
| 1 |
Batterie de robot chargée |
| 1 |
Code VEX V5 |
| 1 |
Câble USB (si vous utilisez un ordinateur) |
| 1 |
Cahier d'ingénierie |
Étape 1 : Préparation de l'exploration
Avant de commencer l’activité, avez-vous chacun de ces éléments prêts ? Vérifiez chacun des éléments suivants :
-
Les moteurs sont-ils branchés sur les bons ports ?
-
Les câbles intelligents sont-ils complètement insérés dans tous les moteurs ?
-
Le cerveau est-il allumé?
-
La batterie est-elle chargée?
![]() Conseils pour les enseignants
Conseils pour les enseignants
Modélisez chacune des étapes de dépannage pour les élèves.
Étape 2 : Démarrer un nouveau projet
Avant de commencer votre projet, sélectionnez le projet modèle Speedbot (Drivetrain 2-Motors, No Gyro). Le projet modèle contient la configuration du moteur du Speedbot. Si le modèle n'est pas utilisé, votre robot n'exécutera pas le projet correctement.

Procédez comme suit :
- Ouvrez le menu Fichier.
- Sélectionner Ouvrir Exemples.
- Sélectionnez et ouvrez le projet de modèle Speedbot (Drivetrain 2-motors, No Gyro).
- Puisque nous utiliserons le lecteur pour le bloc , renommez votre projet Drive.
- Enregistrez votre projet.
- Vérifiez que le nom du projet Drive apparaît désormais dans la fenêtre au centre de la barre d’outils.

![]() Conseils pour les enseignants
Conseils pour les enseignants
-
Puisqu’il s’agit d’une activité d’initiation à la programmation, l’enseignant doit modéliser les étapes, puis demander aux élèves d’effectuer les mêmes actions. L’enseignant doit ensuite surveiller les élèves pour s’assurer qu’ils suivent correctement les étapes.
-
Assurez-vous que les élèves ont sélectionné Ouvrir les exemples dans le menu Fichier.
-
Assurez-vous que les élèves ont sélectionné le projet modèle Speedbot (Drivetrain 2 moteurs, sans gyroscope).
Vous pouvez signaler aux élèves qu'il existe plusieurs sélections parmi lesquelles choisir sur la page Exemples ouverts . Au fur et à mesure qu’ils construisent et utilisent d’autres robots, ils auront la possibilité d’utiliser différents modèles.
-
Vous pouvez demander aux élèves d’ajouter leurs initiales ou le nom de leur groupe au nom du projet. Cela aidera à différencier les projets si vous demandez aux étudiants de les soumettre.
![]() Boîte à outils de l'enseignant
-
Enregistrer des projets
Boîte à outils de l'enseignant
-
Enregistrer des projets
Indiquez que lorsqu'ils ont ouvert VEXcode V5 pour la première fois, la fenêtre était étiquetée Projet VEXcode et qu'elle n'était pas enregistrée (indiqué sur la barre d'outils). Le projet VEXcode est le nom de projet par défaut lors de la première ouverture de VEXcode V5. Une fois le projet renommé Drive et enregistré, l'affichage a été mis à jour sur Enregistré. Grâce à cette fenêtre dans la barre d'outils, il est facile de vérifier que les étudiants utilisent le bon projet et qu'il est enregistré.
Une fois qu'un projet est initialement enregistré, VEXcode V5 enregistre automatiquement toutes les modifications ultérieures, comme indiqué par le message à côté du nom du projet.
Dites aux élèves qu’ils sont maintenant prêts à commencer leur premier projet. Expliquez aux élèves qu’en suivant quelques étapes simples, ils seront en mesure de créer et d’exécuter un projet qui fera avancer le Speedbot.
![]() Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
C'est le moment idéal pour faire une pause et demander aux élèves de revoir les étapes qui viennent d'être réalisées lors du démarrage d'un nouveau projet dans VEXcode V5, individuellement ou en groupe. Demandez aux élèves de réfléchir individuellement avant de partager au sein de leur groupe ou devant toute la classe.
Étape 3 : Aller de l’avant

- Ajoutez le bloc [Drive for] au bloc {When started} dans la zone de programmation.

- Sélectionnez le menu déroulant et changez les unités de pouces en millimètres.

- Modifiez la distance de 1 mm à 100 mm.

- Cliquez sur l'icône Slot . Vous pouvez télécharger votre projet dans l’un des quatre emplacements disponibles dans le Robot Brain. Cliquez sur le numéro 1.

- Connectez le robot à votre ordinateur ou tablette. L'icône Cerveau dans la barre d'outils devient verte une fois qu'une connexion réussie a été établie.

- Cliquez sur le bouton Télécharger dans la barre d’outils pour télécharger le projet Drive sur le Robot Brain.
![]() Boîte à outils de l'enseignant
-
Aide sur les blocs
Boîte à outils de l'enseignant
-
Aide sur les blocs
-
Notez que dans la zone de programmation, il existe déjà un bloc {When started} situé par défaut. Chaque projet commencera avec ce bloc. Lorsque le projet est démarré, les blocs connectés seront suivis dans la séquence dans laquelle ils sont placés.
Démontrez comment cliquer sur le bloc [Drive for] et le faire glisser vers la zone de programmation, en le connectant au bloc {When started}. Vous entendrez un clic lorsqu'il sera fixé.
-
Si vous utilisez un ordinateur, l'étudiant doit avoir VEX V5 Robot Brain connecté à l'ordinateur à l'aide d'un câble USB . Si vous utilisez une tablette, le VEX V5 Robot Brain doit être connecté à la tablette à l'aide de la Smart Radio.
-
Si les élèves utilisent un ordinateur, demandez-leur maintenant de déconnecter le câble USB du Robot Brain. Le fait que le robot soit connecté à un ordinateur pendant l'exécution d'un projet pourrait amener le robot à tirer sur le câble de connexion.
![]() Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Demandez aux élèves de prédire ce qui, selon eux, se passera lorsque ce projet sera téléchargé et exécuté sur le Speedbot. Demandez aux élèves d’enregistrer leurs prédictions dans leurs cahiers d’ingénierie. Si le temps le permet, demandez à chaque groupe de partager sa prédiction.

![]() Boîte à outils de l'enseignant
-
Modèle d'abord
Boîte à outils de l'enseignant
-
Modèle d'abord
Modèle exécutant le projet devant la classe avant de demander à tous les élèves d'essayer en même temps. Rassemblez les élèves dans une zone et laissez suffisamment d'espace pour que le Speedbot puisse se déplacer s'il est placé sur le sol.
Dites aux élèves que c'est maintenant leur tour d'exécuter leur projet. Assurez-vous qu'ils ont un chemin dégagé et qu'aucun Speedbot ne se percute.
- Exécutez le projet sur le robot Speedbot en vous assurant que le projet est sélectionné, puis appuyez sur le bouton Exécuter sur le Robot Brain. Félicitations pour la création de votre premier projet !
Étape 4 : Conduisez en marche arrière

- Modifiez le bloc [Conduire pour] pour afficher arrière au lieu de avant.
- Télécharger le projet.
- Exécutez le projet sur le robot Speedbot en vous assurant que le projet est sélectionné, puis appuyez sur le bouton Exécuter sur le Robot Brain.
![]() Boîte à outils de l'enseignant
-
Compléter l'étape 4
Boîte à outils de l'enseignant
-
Compléter l'étape 4
-
Pour changer le bloc [Conduire pour] de avant à arrière, cliquez simplement sur le menu déroulant et sélectionnez arrière.
-
Le nombre de mm peut être modifié, mais pour cet exemple nous le laisserons à 100 mm comme défini à l'étape précédente.
-
Si les élèves utilisent un ordinateur, demandez-leur de déconnecter le câble USB de Robot Brain avant d'exécuter le projet.
-
Étant donné que nous ne sélectionnons pas un nouvel emplacement, le nouveau projet sera téléchargé dans l’emplacement 1 et remplacera le projet précédent.
-
Étant donné que VEXcode V5 dispose d'une fonction de sauvegarde automatique, il n'est pas nécessaire de sauvegarder à nouveau le projet.
Étape 5 : Attendez puis conduisez en marche arrière

- Ajoutez un bloc [Attendre] avant le bloc [Conduire pendant] . Cela indiquera au robot d’attendre avant de reculer.
- Insérez trois secondes dans le bloc [Attendre] . Cela indique au robot d'attendre trois minutes avant de reculer.
- Télécharger le projet.
- Exécutez le projet sur le robot Speedbot en vous assurant que le projet est sélectionné, puis appuyez sur le bouton Exécuter.
![]() Boîte à outils de l'enseignant
-
Compléter l'étape 5
Boîte à outils de l'enseignant
-
Compléter l'étape 5
-
Un bloc [Wait] peut être placé n'importe où dans le projet. Pour plus d'informations sur le bloc [Attendre] , ouvrez l'Aide .
-
L'utilisation d'un bloc [Attendre] ne terminera pas le projet.
-
Si les élèves utilisent un ordinateur, demandez-leur de déconnecter le câble USB de Robot Brain avant d'exécuter le projet.
-
Étant donné que nous ne sélectionnons pas un nouvel emplacement, le nouveau projet sera téléchargé dans l’emplacement 1 et remplacera le projet précédent.
-
Étant donné que VEXcode V5 dispose d'une fonction de sauvegarde automatique, il n'est pas nécessaire de sauvegarder à nouveau le projet.
Étape 6 : Complétez le défi des exercices de basket-ball !
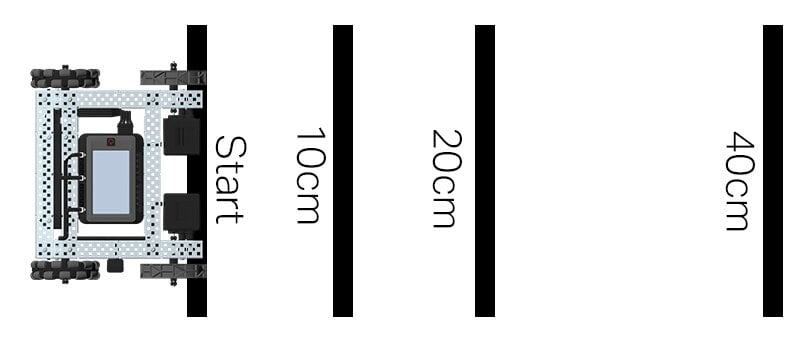
Dans le défi des exercices de basket-ball, le robot doit être capable de parcourir une série de lignes à différentes distances. Le robot avancera jusqu'à la première ligne qui se trouve à 10 cm de la position de départ, attendra 1 seconde, puis reculera pour revenir à cette même ligne. Le robot répétera ensuite l'action en avançant de 20 cm jusqu'à la deuxième ligne, attendra 1 seconde, puis reculera jusqu'à la ligne de départ d'origine. Le robot avancera jusqu'à la troisième ligne sur une distance de 40 cm, attendra 1 seconde, puis reviendra enfin à la ligne de départ pour terminer le défi.
Avant de programmer le robot, planifiez le chemin et les comportements du robot dans votre carnet d'ingénierie.
Après avoir terminé le défi de basket-ball, vous pourrez combiner des mouvements avant et arrière avec des comportements de robot supplémentaires pour relever des défis encore plus avancés.
Gardez à l'esprit lors de la programmation que 1 cm = 10 mm
![]() Conseils pour les enseignants
Conseils pour les enseignants
Validez que le robot a réussi le défi en utilisant un mètre ou une règle et du ruban adhésif pour marquer une position de départ pour le robot. Marquez ensuite 10 mm, 20 mm et 40 mm à partir de cette position de départ comme référence à l'endroit où le robot doit se déplacer pour relever le défi.
![]() Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Boîte à outils de l'enseignant
-
Arrêtez-vous et discutez
Demandez aux élèves de partager leurs solutions par paires avant d’en discuter avec toute la classe. Facilitez la discussion en posant les questions suivantes :
-
Avez-vous rencontré des difficultés lors de la programmation de ce défi ?
-
Votre robot s'est-il comporté comme vous l'attendiez en fonction de votre projet ? Pourquoi ou pourquoi pas ?
-
Si vous pouviez recommencer le défi, y a-t-il quelque chose que vous auriez fait différemment ?
