
![]() Skolotāja rīkkopa
-
Aktivitātes izklāsts
Skolotāja rīkkopa
-
Aktivitātes izklāsts
-
Šī izpēte iepazīstinās studentus ar pamata braukšanas uz priekšu, atpakaļgaitu un gaidīšanas programmēšanas uzvedībām.
-
Izmantojot V5 Speedbot (Drivetrain 2-motors, No Gyro) veidņu projektu, skolēni var ieprogrammēt Speedbot virzīties uz priekšu, vienkārši atlasot [Drive for] bloku.
Speedbot ir gatavs kustībai!
Šī izpēte sniegs jums rīkus, lai varētu sākt veidot dažus lieliskus projektus, lai jūsu Speedbot varētu sekot.
-
VEXcode V5, kas tiks izmantots šajā izpētē:

-
Lai uzzinātu vairāk informācijas par bloku, atveriet Help un pēc tam atlasiet bloku [Drive for] .

-
Pārliecinieties, vai jums ir vajadzīgā aparatūra, inženierijas piezīmjdators un VEXcode V5 ir lejupielādēti un gatavi.
![]() Skolotāju padomi
Skolotāju padomi
Ja šī ir pirmā reize, kad students izmanto VEXcode V5, viņš jebkurā laikā šīs izpētes laikā var atsaukties uz apmācībām. Pamācības atrodas rīkjoslā.

| Daudzums | Nepieciešamie materiāli |
|---|---|
| 1 |
Speedbot robots |
| 1 |
Uzlādēts robota akumulators |
| 1 |
VEXcode V5 |
| 1 |
USB kabelis (ja izmantojat datoru) |
| 1 |
Inženierzinātņu piezīmju grāmatiņa |
1. darbība: sagatavošanās izpētei
Vai pirms aktivitātes sākšanas jums ir gatavs katrs no šiem priekšmetiem? Pārbaudiet katru no šiem:
-
Vai motori ir pievienoti pareizajiem portiem?
-
Vai viedie kabeļi ir pilnībā ievietoti visos motoros?
-
Vai Brain ir ieslēgts?
-
Vai akumulators ir uzlādēts?
![]() Skolotāju padomi
Skolotāju padomi
Modelējiet katru problēmu novēršanas darbību skolēniem.
2. darbība. Sāciet jaunu projektu
Pirms sākat savu projektu, atlasiet Speedbot (Drivetrain 2-Motors, No Gyro) veidnes projektu. Veidnes projektā ir iekļauta Speedbot motora konfigurācija. Ja veidne netiek izmantota, jūsu robots projektu nedarbos pareizi.

Veiciet tālāk norādītās darbības.
-
Atveriet izvēlni Fails.
-
Izvēlieties Atvērt Piemēri.
-
Atlasiet un atveriet Speedbot (Drivetrain 2-motors, No Gyro) veidnes projektu.
-
Tā kā mēs izmantosim disku blokam, pārdēvējiet savu projektu par disku.
-
Saglabājiet savu projektu.
-
Pārbaudiet, vai projekta nosaukums Disks tagad ir logā rīkjoslas centrā.

![]() Skolotāju padomi
Skolotāju padomi
-
Tā kā šī ir programmēšanas sākuma darbība, skolotājam ir jāmodelē soļi un pēc tam jālūdz skolēniem veikt tās pašas darbības. Pēc tam skolotājam jāuzrauga skolēni, lai pārliecinātos, ka viņi pareizi izpilda darbības.
-
Pārliecinieties, vai skolēni izvēlnē Fails ir atlasījuši Atvērt piemērus.
-
Pārliecinieties, vai skolēni ir izvēlējušies Speedbot (Drivetrain 2-motors, No Gyro) veidnes projektu.
Varat norādīt studentiem, ka lapā Atvērt Piemēri ir vairākas izvēles iespējas. Veidojot un izmantojot citus robotus, viņiem būs iespēja izmantot dažādas veidnes.
-
Varat lūgt studentiem projekta nosaukumam pievienot savus iniciāļus vai savas grupas nosaukumu. Tas palīdzēs atšķirt projektus, ja lūgsit studentus tos iesniegt.
![]() Skolotāju rīkkopa
Projektu
Skolotāju rīkkopa
Projektu
Norādiet, ka, pirmo reizi atverot VEXcode V5, logs tika apzīmēts ar VEXcode Project un tas netika saglabāts (norādīts rīkjoslā). VEXcode Project ir noklusējuma projekta nosaukums, pirmo reizi atverot VEXcode V5. Kad projekts tika pārdēvēts par Drive un saglabāts, displejs tika atjaunināts uz Saglabāts. Izmantojot šo logu rīkjoslā, ir viegli pārbaudīt, vai skolēni izmanto pareizo projektu un tas ir saglabāts.
Kad projekts ir sākotnēji saglabāts, VEXcode V5 automātiski saglabā visas turpmākās izmaiņas, kā norādīts ziņojumā blakus projekta nosaukumam.
Pastāstiet studentiem, ka viņi tagad ir gatavi sākt savu pirmo projektu. Paskaidrojiet skolēniem, ka, veicot tikai dažas vienkāršas darbības, viņi varēs izveidot un vadīt projektu, kas virzīs Speedbot uz priekšu.
![]() Skolotāju rīkkopa
-
Apstāties un apspriest
Skolotāju rīkkopa
-
Apstāties un apspriest
Tas ir labs punkts, lai apturētu un likt studentiem pārskatīt soļus, kas tikko tika pabeigti, uzsākot jaunu projektu VEXcode V5 individuāli vai grupās. Palūdziet studentiem pārdomāt individuāli, pirms dalās savā grupā vai visai klasei.
3. darbība: brauciet uz priekšu
-
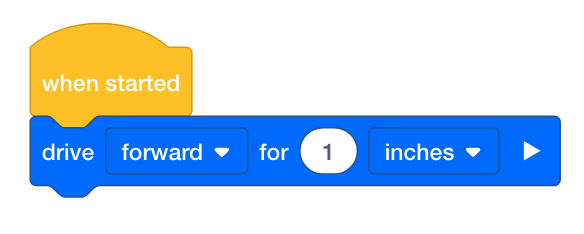
Pievienojiet [Drive for] bloku {When started} blokam programmēšanas apgabalā.

-
Atlasiet nolaižamo izvēlni un mainiet mērvienības no collām uz milimetriem.

-
Mainiet attālumu no 1 mm uz 100 mm.

-
Noklikšķiniet uz ikonas Slot . Jūs varat lejupielādēt savu projektu vienā no četriem pieejamajiem Robot Brain slotiem. Noklikšķiniet uz skaitļa 1.

-
Savienojiet robotu ar datoru vai planšetdatoru. Smadzeņu ikona rīkjoslā kļūst zaļa, tiklīdz ir izveidots veiksmīgs savienojums.

-
Rīkjoslā noklikšķiniet uz pogas Lejupielādēt , lai lejupielādētu projektu Drive rīkā Robot Brain.
![]() Skolotāju rīkkopa
-
Palīdzība ar blokiem
Skolotāju rīkkopa
-
Palīdzība ar blokiem
-
Norādiet, ka programmēšanas apgabalā pēc noklusējuma jau ir {When started} bloks. Katrs projekts sāksies ar šo bloku. Kad projekts tiek uzsākts, savienotajiem blokiem tiks sekots secībā, kādā tie ir ievietoti.
Demonstrējiet noklikšķināšanu uz bloka [Drive for] un velciet to uz programmēšanas apgabalu, savienojot to ar {When started} bloku. Kad tas tiks piestiprināts, jūs dzirdēsit klikšķi.
-
Ja izmantojat datoru, skolēnam VEX V5 Robot Brain jābūt savienotam ar datoru, izmantojot USB kabeli. Ja izmantojat planšetdatoru, VEX V5 Robot Brain ir jāsavieno ar planšetdatoru, izmantojot viedo radio.
-
Ja skolēni izmanto datoru, palūdziet viņiem tagad atvienot USB kabeli no Robot Brain. Ja robots ir pieslēgts datoram projekta izpildes laikā, robots var aizvilkt savienojuma kabeli.
![]() Skolotāju rīkkopa
-
Apstāties un apspriest
Skolotāju rīkkopa
-
Apstāties un apspriest
Lūdziet studentus paredzēt, kas, viņuprāt, notiks, kad šis projekts tiks lejupielādēts un palaists Speedbot. Pastāstiet studentiem ierakstīt savas prognozes savās inženierzinātņu piezīmju grāmatiņās. Ja laiks atļauj, palūdziet katrai grupai dalīties savās prognozēs.

-
Pārbaudiet, vai jūsu projekts ir lejupielādēts Speedbot's Brain, apskatot Robot Brain ekrānu. Projekta nosaukums ir jānorāda 1. vietā.
![]() Skolotāju rīkkopa
-
Vispirms modelis
Skolotāju rīkkopa
-
Vispirms modelis
Modelējiet projektu, kas darbojas klases priekšā, pirms visi skolēni mēģina vienlaikus. Sapulciniet skolēnus vienā zonā un atstājiet pietiekami daudz vietas Speedbot kustībai, ja tas ir novietots uz grīdas.
Pastāstiet studentiem, ka tagad ir viņu kārta vadīt savu projektu. Pārliecinieties, vai tiem ir brīvs ceļš un neviens Speedbots nesaskaras.
-
Palaidiet projektu Speedbot robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Palaist uz Robot Brain. Apsveicam ar pirmā projekta izveidi!
4. darbība: brauciet atpakaļgaitā

-
Mainiet [Drive for] bloku , lai parādītu atpakaļgaitā nevis uz priekšu.
-
Lejupielādēt projektu.
-
Palaidiet projektu Speedbot robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Palaist uz Robot Brain.
![]() Skolotāja rīkkopa
darbības pabeigšana
Skolotāja rīkkopa
darbības pabeigšana
-
Lai mainītu bloku [Drive for] no uz priekšu uz reverse, vienkārši noklikšķiniet uz nolaižamās izvēlnes un atlasiet atpakaļgaitā.
-
mm skaitu var mainīt, taču šajā piemērā mēs tos atstāsim uz 100 mm, kā iestatīts iepriekšējā darbībā.
-
Ja skolēni izmanto datoru, pirms projekta palaišanas lūdziet viņiem atgādināt, ka atvieno USB kabeli no Robot Brain.
-
Tā kā mēs neatlasām jaunu slotu, jaunais projekts tiks lejupielādēts 1. slotā un aizstās iepriekšējo projektu.
-
Tā kā VEXcode V5 ir automātiskā saglabāšana, projekts nav jāsaglabā vēlreiz.
5. darbība: uzgaidiet, pēc tam brauciet atpakaļgaitā

-
Pievienojiet [Wait] bloku pirms [Drive for] bloka. Tas liks robotam pagaidīt, pirms braukt atpakaļgaitā.
-
Ievietojiet trīs sekundes [Wait] blokā. Tas liek robotam pagaidīt trīs pirms braukšanas atpakaļgaitā.
-
Lejupielādēt projektu.
-
Palaidiet projektu Speedbot robotā, pārliecinoties, ka projekts ir atlasīts, un pēc tam nospiediet pogu Palaist.
![]() Skolotāju rīkkopa
darbības pabeigšana
Skolotāju rīkkopa
darbības pabeigšana
-
[Pagaidiet] bloku var novietot jebkurā projekta vietā. Lai iegūtu papildinformāciju par bloku [Pagaidiet] , atveriet Palīdzība.
-
Izmantojot [Pagaidiet] bloku, projekts netiks beigts.
-
Ja skolēni izmanto datoru, pirms projekta palaišanas lūdziet viņiem atgādināt, ka atvieno USB kabeli no Robot Brain.
-
Tā kā mēs neatlasām jaunu slotu, jaunais projekts tiks lejupielādēts 1. slotā un aizstās iepriekšējo projektu.
-
Tā kā VEXcode V5 ir automātiskā saglabāšana, projekts nav jāsaglabā vēlreiz.
6. solis: Pabeidziet basketbola treniņu izaicinājumu!
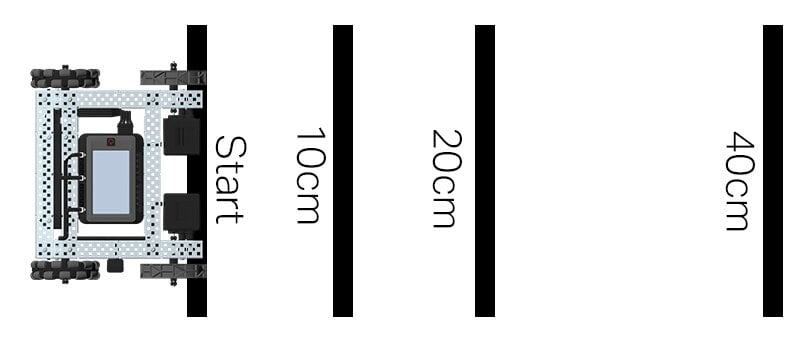
Basketbola treniņu izaicinājumā robotam jāspēj pārvietoties pa virkni līniju dažādos attālumos. Robots virzīsies uz priekšu līdz pirmajai līnijai, kas atrodas 10 cm no sākuma pozīcijas, pagaidīs 1 sekundi un pēc tam dosies atpakaļ, atgriežoties tajā pašā līnijā. Pēc tam robots atkārtos darbību, nobraucot 20 cm uz priekšu līdz otrajai līnijai, pagaidiet 1 sekundi un pēc tam brauc atpakaļ uz sākotnējo starta līniju. Robots brauks uz priekšu uz trešo līniju ar 40 cm attālumu, pagaidīs 1 sekundi un tad beidzot atgriezīsies starta rindā, lai pabeigtu izaicinājumu.
Pirms robota programmēšanas savā inženierijas piezīmjdatorā izplānojiet robota ceļu un uzvedību.
Pēc Basketbola izaicinājuma pabeigšanas jūs varēsiet apvienot kustības uz priekšu un atpakaļgaitu ar papildu robota uzvedību, lai izpildītu vēl sarežģītākus izaicinājumus.
Programmējot paturiet prātā, ka 1 cm = 10 mm
![]() Skolotāju padomi
Skolotāju padomi
Pārbaudiet, vai robots ir veiksmīgi izpildījis izaicinājumu, izmantojot skaitītāju vai lineālu un lenti, lai atzīmētu robota sākuma pozīciju. Pēc tam atzīmējiet 10 mm, 20 mm un 40 mm no sākuma pozīcijas kā atsauci uz vietu, kur robotam jāpārvietojas, lai izpildītu izaicinājumu.
![]() Skolotāju rīkkopa
-
Apstāties un apspriest
Skolotāju rīkkopa
-
Apstāties un apspriest
Palūdziet studentiem dalīties savos risinājumos pa pāriem, pirms tos apspriež visa klase. Veiciniet diskusiju, jautājot:
-
Vai, programmējot šo izaicinājumu, saskārāties ar kādām grūtībām?
-
Vai jūsu robots izturējās tā, kā jūs gaidījāt, pamatojoties uz jūsu projektu? Kāpēc vai kāpēc ne?
-
Ja jūs varētu izpildīt izaicinājumu, vai ir kaut kas, ko jūs būtu darījis savādāk?
