
![]() โครงร่างกิจกรรมกล่องเครื่องมือสำหรับครู
-
โครงร่างกิจกรรมกล่องเครื่องมือสำหรับครู
-
-
การสำรวจนี้จะแนะนำให้ผู้เรียนได้รู้จักกับพฤติกรรมการเขียนโปรแกรมการขับเคลื่อนไปข้างหน้า ถอยหลัง และรอคอยขั้นพื้นฐาน
-
การใช้โปรเจ็กต์เทมเพลต V5 Speedbot (ระบบส่งกำลัง 2 มอเตอร์ ไม่มีไจโร) ช่วยให้นักเรียนสามารถตั้งโปรแกรมให้ Speedbot เคลื่อนที่ไปข้างหน้าได้ เพียงเลือกบล็อก [ขับเคลื่อนสำหรับ]
Speedbot พร้อมเคลื่อนที่แล้ว!
การสำรวจนี้จะมอบเครื่องมือที่ช่วยให้คุณเริ่มสร้างโปรเจ็กต์เจ๋งๆ ให้ Speedbot ของคุณทำตามได้
- VEXcode V5 ที่จะใช้ในการสำรวจนี้:

- หากต้องการดูข้อมูลเพิ่มเติมเกี่ยวกับบล็อก ให้เปิด Help จากนั้นเลือกบล็อก [Drive for]

- ตรวจสอบให้แน่ใจว่าคุณมีฮาร์ดแวร์ที่จำเป็น สมุดบันทึกวิศวกรรม และ VEXcode V5 ที่ดาวน์โหลดและพร้อมใช้งานแล้ว
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
หากนี่เป็นครั้งแรกที่นักเรียนใช้ VEXcode V5 พวกเขาสามารถอ้างอิงบทช่วยสอนได้ตลอดเวลาในระหว่างการสำรวจครั้งนี้ บทช่วยสอนจะอยู่ในแถบเครื่องมือ

| ปริมาณ | วัสดุที่ต้องใช้ |
|---|---|
| 1 |
หุ่นยนต์สปีดบอท |
| 1 |
แบตเตอรี่หุ่นยนต์ชาร์จแล้ว |
| 1 |
รหัส VEX V5 |
| 1 |
สาย USB (หากใช้คอมพิวเตอร์) |
| 1 |
สมุดบันทึกวิศวกรรม |
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
จำลองขั้นตอนการแก้ไขปัญหาแต่ละขั้นตอนให้กับนักเรียน
ขั้นตอนที่ 2: เริ่มโครงการใหม่
ก่อนเริ่มโครงการของคุณ ให้เลือกโครงการเทมเพลต Speedbot (Drivetrain 2 มอเตอร์, ไม่มีไจโร) โครงการเทมเพลตประกอบด้วยการกำหนดค่ามอเตอร์ของ Speedbot หากไม่ใช้เทมเพลต หุ่นยนต์ของคุณจะไม่สามารถรันโครงการได้อย่างถูกต้อง

ดำเนินการตามขั้นตอนต่อไปนี้:
- เปิดเมนูไฟล์
- เลือก เปิด ตัวอย่าง.

- เลือกและเปิดโครงการเทมเพลต Speedbot (Drivetrain 2 มอเตอร์, ไม่มีไจโร)
- เนื่องจากเราจะใช้ไดรฟ์ สำหรับ บล็อก โปรดเปลี่ยนชื่อโปรเจ็กต์ของคุณเป็นไดรฟ์
- บันทึก โครงการของคุณ
- ตรวจสอบให้แน่ใจว่าชื่อโครงการ ไดรฟ์ อยู่ในหน้าต่างตรงกลางแถบเครื่องมือแล้ว

![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
-
เนื่องจากนี่เป็นกิจกรรมเริ่มต้นในการเขียนโปรแกรม ครูควรสร้างแบบจำลองขั้นตอน จากนั้นจึงขอให้นักเรียนทำตามขั้นตอนเดียวกัน จากนั้นครูควรติดตามนักเรียนเพื่อให้แน่ใจว่านักเรียนปฏิบัติตามขั้นตอนอย่างถูกต้อง
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือก เปิดตัวอย่าง จากเมนูไฟล์
-
ตรวจสอบให้แน่ใจว่านักเรียนได้เลือกโครงการเทมเพลต Speedbot (Drivetrain 2 มอเตอร์, No Gyro)
คุณสามารถชี้ให้ผู้เรียนทราบว่ามีตัวเลือกหลายตัวให้เลือกบนหน้า เปิด ตัวอย่าง เมื่อพวกเขาสร้างและใช้หุ่นยนต์ตัวอื่น พวกเขาจะมีโอกาสใช้เทมเพลตที่แตกต่างกัน
-
คุณสามารถขอให้เด็กนักเรียนเพิ่มอักษรย่อของตนเองหรือชื่อกลุ่มลงในชื่อโครงการได้ สิ่งนี้จะช่วยแยกแยะโครงการต่างๆ ออกจากกัน หากคุณขอให้นักศึกษาส่งโครงการเหล่านั้น
![]() กล่องเครื่องมือสำหรับครู
-
การบันทึกโครงการ
กล่องเครื่องมือสำหรับครู
-
การบันทึกโครงการ
ชี้ให้เห็นว่าเมื่อเปิด VEXcode V5 ครั้งแรก หน้าต่างนั้นมีป้ายกำกับว่า VEXcode Project และไม่ได้รับการบันทึก (ระบุไว้บนแถบเครื่องมือ) โครงการ VEXcode เป็นชื่อโครงการเริ่มต้นเมื่อเปิด VEXcode V5 ครั้งแรก เมื่อเปลี่ยนชื่อโครงการเป็น ไดรฟ์ และบันทึกแล้ว การแสดงผลจะได้รับการอัปเดตเป็น บันทึกแล้ว การใช้หน้าต่างนี้ในแถบเครื่องมือ สามารถตรวจสอบได้อย่างง่ายดายว่านักเรียนกำลังใช้โครงการที่ถูกต้องและบันทึกไว้หรือไม่
เมื่อบันทึกโครงการในครั้งแรกแล้ว VEXcode V5 จะบันทึกการเปลี่ยนแปลงที่เกิดขึ้นตามมาโดยอัตโนมัติ ดังที่ระบุโดยข้อความถัดจากชื่อโครงการ
บอกนักเรียนว่าตอนนี้พวกเขาพร้อมที่จะเริ่มโครงการแรกแล้ว อธิบายแก่ผู้เรียนว่าเพียงทำตามขั้นตอนง่าย ๆ ไม่กี่ขั้นตอน ผู้เรียนก็จะสามารถสร้างและรันโปรเจ็กต์ที่จะขับเคลื่อน Speedbot ไปข้างหน้าได้
![]() กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
นี่เป็นจุดที่ดีที่จะหยุดชั่วคราวแล้วให้ผู้เรียนทบทวนขั้นตอนที่เพิ่งเสร็จสิ้นในการเริ่มโปรเจ็กต์ใหม่ใน VEXcode V5 เป็นรายบุคคลหรือเป็นกลุ่ม ขอให้นักเรียนสะท้อนความคิดของตนเองก่อนที่จะแบ่งปันภายในกลุ่มหรือกับทั้งชั้นเรียน
ขั้นตอนที่ 3: ขับเคลื่อนไปข้างหน้า

- เพิ่มบล็อก [Drive for] ลงในบล็อก {When started} ในพื้นที่การเขียนโปรแกรม

- เลือกรายการดรอปดาวน์และเปลี่ยนหน่วยจากนิ้วเป็นมิลลิเมตร

- เปลี่ยนระยะห่างจาก 1 มม. เป็น 100 มม.

- คลิกไอคอน ช่อง คุณสามารถดาวน์โหลดโครงการของคุณไปยังหนึ่งในสี่ช่องที่พร้อมใช้งานใน Robot Brain ได้ คลิกตัวเลข 1.

- เชื่อมต่อหุ่นยนต์กับคอมพิวเตอร์หรือแท็บเล็ตของคุณ ไอคอนสมองในแถบเครื่องมือจะเปลี่ยนเป็นสีเขียวเมื่อเชื่อมต่อสำเร็จ

- คลิกปุ่ม ดาวน์โหลด บนแถบเครื่องมือเพื่อดาวน์โหลดโครงการ Drive ไปยัง Robot Brain
![]() กล่องเครื่องมือสำหรับครู
-
ช่วยเหลือเกี่ยวกับบล็อค
กล่องเครื่องมือสำหรับครู
-
ช่วยเหลือเกี่ยวกับบล็อค
-
ชี้ให้ทราบว่าในพื้นที่การเขียนโปรแกรม มีบล็อก {When started} อยู่แล้วตามค่าเริ่มต้น ทุกโครงการจะเริ่มต้นด้วยบล็อคนี้ เมื่อเริ่มต้นโครงการ บล็อกที่เชื่อมต่อจะถูกติดตามตามลำดับที่วางไว้
สาธิตการคลิกบนบล็อก [ไดรฟ์สำหรับ] และลากไปยังพื้นที่การเขียนโปรแกรม โดยเชื่อมต่อกับบล็อก {When started} คุณจะได้ยินเสียงคลิกเมื่อติดตั้ง
-
หากคุณใช้คอมพิวเตอร์ นักเรียนควรเชื่อมต่อ VEX V5 Robot Brain เข้ากับคอมพิวเตอร์โดยใช้สาย USB หากคุณใช้แท็บเล็ต ควรเชื่อมต่อ VEX V5 Robot Brain เข้ากับแท็บเล็ตโดยใช้ Smart Radio
-
หากนักเรียนกำลังใช้คอมพิวเตอร์ ให้พวกเขาถอดสาย USB ออกจาก Robot Brain ทันที การเชื่อมต่อหุ่นยนต์เข้ากับคอมพิวเตอร์ขณะกำลังรันโครงการอาจทำให้หุ่นยนต์ดึงสายเคเบิลเชื่อมต่อได้
![]() กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
ขอให้เด็กนักเรียนทำนายว่าอะไรจะเกิดขึ้นเมื่อดาวน์โหลดและรันโปรเจ็กต์นี้บน Speedbot บอกให้นักเรียนบันทึกการคาดการณ์ของพวกเขาลงในสมุดบันทึกวิศวกรรมของพวกเขา หากมีเวลา ขอให้แต่ละกลุ่มแบ่งปันคำทำนายของตน

![]() กล่องเครื่องมือสำหรับครู
-
รุ่นแรก
กล่องเครื่องมือสำหรับครู
-
รุ่นแรก
จำลองการรันโครงการหน้าชั้นเรียนก่อนที่นักเรียนทุกคนจะลองทำพร้อมกัน รวบรวมนักเรียนไว้ที่จุดเดียวและเว้นพื้นที่ให้เพียงพอสำหรับให้ Speedbot เคลื่อนที่ได้หากวางไว้บนพื้น
บอกนักเรียนว่าตอนนี้ถึงตาพวกเขาที่จะดำเนินโครงการแล้ว ตรวจสอบให้แน่ใจว่ามีเส้นทางที่ชัดเจนและไม่มี Speedbots วิ่งชนกัน
- รันโครงการ บนหุ่นยนต์ Speedbot โดยตรวจสอบให้แน่ใจว่าได้เลือกโครงการแล้ว จากนั้นกดปุ่ม Run บน Robot Brain ขอแสดงความยินดีกับการสร้างโครงการแรกของคุณ!
ขั้นตอนที่ 4: ขับถอยหลัง

- เปลี่ยนบล็อค [Drive for] ให้แสดง ถอยหลัง แทนที่จะเป็น เดินหน้า
- ดาวน์โหลด โครงการ.
- รันโครงการ บนหุ่นยนต์ Speedbot โดยตรวจสอบให้แน่ใจว่าได้เลือกโครงการแล้ว จากนั้นกดปุ่ม Run บน Robot Brain
![]() กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 4
กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 4
-
หากต้องการเปลี่ยนบล็อค [ขับสำหรับ] จาก ไปข้างหน้า เป็น ถอยหลังเพียงแค่คลิกที่เมนูแบบดรอปดาวน์ แล้วเลือก ถอยหลัง
-
สามารถเปลี่ยนจำนวนมิลลิเมตรได้ แต่สำหรับตัวอย่างนี้เราจะคงไว้ที่ 100 มิลลิเมตรตามที่กำหนดไว้ในขั้นตอนก่อนหน้า
-
หากนักเรียนกำลังใช้คอมพิวเตอร์ โปรดเตือนให้พวกเขาถอดสาย USB ออกจาก Robot Brain ก่อนที่จะรันโปรเจ็กต์
-
เนื่องจากเราไม่ได้เลือกสล็อตใหม่ โปรเจ็กต์ใหม่จะดาวน์โหลดไปที่สล็อต 1 และแทนที่โปรเจ็กต์ก่อนหน้า
-
เนื่องจาก VEXcode V5 มีการบันทึกอัตโนมัติ จึงไม่จำเป็นต้องบันทึกโครงการอีกครั้ง
ขั้นตอนที่ 5: รอสักครู่แล้วจึงขับถอยหลัง

- เพิ่มบล็อก [Wait] ก่อนบล็อก [Drive for] นี่จะเป็นการบอกให้หุ่นยนต์รอก่อนที่จะขับถอยหลัง
- แทรกสามวินาทีเข้าไปในบล็อก [รอ] นี่จะบอกให้หุ่นยนต์รอสามวินาทีก่อนที่จะขับถอยหลัง
- ดาวน์โหลด โครงการ.
- รันโครงการ บนหุ่นยนต์ Speedbot โดยตรวจสอบให้แน่ใจว่าได้เลือกโครงการแล้ว จากนั้นกดปุ่ม Run
![]() กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 5
กล่องเครื่องมือสำหรับครู
-
เสร็จสิ้นขั้นตอนที่ 5
-
สามารถวางบล็อค [Wait] ไว้ที่ใดก็ได้ในโครงการ สำหรับข้อมูลเพิ่มเติมเกี่ยวกับบล็อก [รอ] ให้เปิด Help
-
การใช้บล็อก [Wait] จะไม่ทำให้โครงการสิ้นสุด
-
หากนักเรียนกำลังใช้คอมพิวเตอร์ โปรดเตือนให้พวกเขาถอดสาย USB ออกจาก Robot Brain ก่อนที่จะรันโปรเจ็กต์
-
เนื่องจากเราไม่ได้เลือกสล็อตใหม่ โปรเจ็กต์ใหม่จะดาวน์โหลดไปที่สล็อต 1 และแทนที่โปรเจ็กต์ก่อนหน้า
-
เนื่องจาก VEXcode V5 มีการบันทึกอัตโนมัติ จึงไม่จำเป็นต้องบันทึกโครงการอีกครั้ง
ขั้นตอนที่ 6: ทำภารกิจ Basketball Drills ให้สำเร็จ!
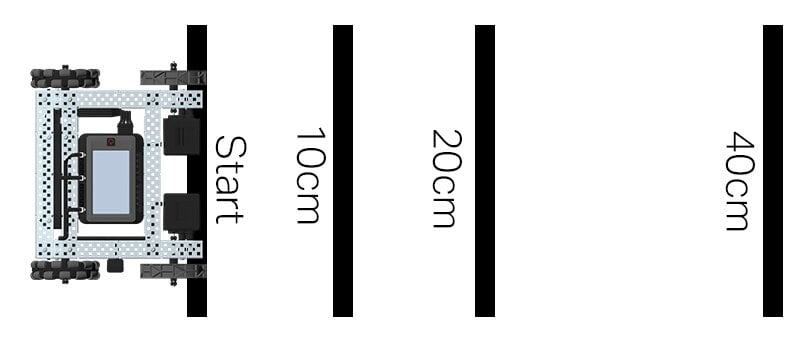
ในการท้าทายการฝึกซ้อมบาสเก็ตบอล หุ่นยนต์จะต้องสามารถเคลื่อนที่ไปตามเส้นต่างๆ ในระยะทางที่ต่างกันได้ หุ่นยนต์จะเดินทางไปข้างหน้าสู่เส้นแรกซึ่งอยู่ห่างจากตำแหน่งเริ่มต้น 10 ซม. รอ 1 วินาที แล้วเดินทางถอยหลังเพื่อกลับมายังเส้นเดิม จากนั้นหุ่นยนต์จะทำซ้ำการกระทำโดยขับไปข้างหน้า 20 ซม. ไปยังเส้นที่ 2 รอ 1 วินาที แล้วจึงขับถอยหลังไปยังเส้นเริ่มต้นเดิม หุ่นยนต์จะขับไปข้างหน้าจนถึงเส้นที่ 3 ด้วยระยะทาง 40 ซม. รอ 1 วินาที จากนั้นจึงกลับมาที่เส้นเริ่มต้นในที่สุดเพื่อจบการท้าทาย
ก่อนที่จะตั้งโปรแกรมหุ่นยนต์ ให้วางแผนเส้นทางและพฤติกรรมของหุ่นยนต์ในสมุดบันทึกวิศวกรรมของคุณ
หลังจากทำ Basketball Challenge เสร็จแล้ว คุณจะสามารถรวมการเคลื่อนที่ไปข้างหน้าและถอยหลังเข้ากับพฤติกรรมหุ่นยนต์เพิ่มเติมเพื่อทำภารกิจที่ยากขึ้นไปอีก
โปรดจำไว้เมื่อตั้งโปรแกรมว่า 1 ซม. = 10 มม.
![]() เคล็ดลับสำหรับครู
เคล็ดลับสำหรับครู
ตรวจสอบว่าหุ่นยนต์ทำภารกิจสำเร็จโดยใช้ไม้บรรทัดหรือเทปวัดเพื่อทำเครื่องหมายตำแหน่งเริ่มต้นสำหรับหุ่นยนต์ จากนั้นทำเครื่องหมาย 10 มม. 20 มม. และ 40 มม. จากตำแหน่งเริ่มต้นนั้นเพื่ออ้างอิงถึงตำแหน่งที่หุ่นยนต์ต้องเคลื่อนที่เพื่อทำภารกิจให้สำเร็จ
![]() กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
กล่องเครื่องมือสำหรับครู
-
หยุดและพูดคุย
ขอให้นักเรียนแบ่งปันวิธีแก้ปัญหาของตนเป็นคู่ก่อนที่จะหารือกันทั้งชั้นเรียน อำนวยความสะดวกในการสนทนาโดยถามว่า:
-
คุณพบกับความยากลำบากใด ๆ ในการเขียนโปรแกรมความท้าทายนี้หรือไม่?
-
หุ่นยนต์ของคุณทำงานตามที่คุณคาดหวังไว้ตามโครงการของคุณหรือไม่? ทำไมหรือทำไมไม่?
-
หากคุณสามารถทำความท้าทายอีกครั้งได้ มีอะไรที่คุณอยากจะทำแตกต่างออกไปหรือไม่?
