
পাঠ ৩: চাপ না দেওয়া পর্যন্ত গাড়ি চালানো
এখন যেহেতু আপনি Wall Maze Playgroundএ VR রোবটকে 'A' অক্ষরে নেভিগেট করার জন্য একটি VEXcode VR প্রকল্প তৈরি করেছেন, আপনি শর্তাবলী এবং সেন্সর মান ব্যবহার করে আপনার দক্ষতা প্রসারিত করবেন। এই পাঠে, আপনি VR রোবটটিকে Wall Maze Playgroundএর '2' নম্বরে নেভিগেট করবেন, তারপর 'B' অক্ষরে গাড়ি চালানোর জন্য অতিরিক্ত ব্লক কেন প্রয়োজন তা অন্বেষণ করবেন। মিনি-চ্যালেঞ্জে, আপনি ওয়াল মেজের শুরু থেকে '3' নম্বরে নেভিগেট করার জন্য এই দক্ষতাগুলি প্রয়োগ করবেন।
শেখার ফলাফল
- সনাক্ত করুন যে একটি শর্ত সর্বদা একটি সত্য বা মিথ্যা মান রিপোর্ট করে।
- বাম্পার সেন্সর চাপা না হওয়া পর্যন্ত একটি VR রোবট ড্রাইভ ফরোয়ার্ড আছে এমন একটি প্রকল্পে প্রোগ্রাম প্রবাহ বর্ণনা করুন।
- প্রকল্পগুলিতে শর্তগুলি কেন ব্যবহার করা হয় তা বর্ণনা করুন।
- প্রোগ্রাম এক্সিকিউশন হাইলাইট করার জন্য ধাপ বৈশিষ্ট্যটি কীভাবে ব্যবহার করবেন তা শনাক্ত করুন।
- ব্যাখ্যা করুন কেন পদক্ষেপ বৈশিষ্ট্যটি ব্যবহার করা সমস্যা সমাধানে এবং একটি প্রকল্পের প্রবাহ ট্রেসিং করতে সহায়ক।
প্রকল্পের নাম পরিবর্তন করুন
- যদি পূর্ববর্তী পাঠের প্রকল্পটি ইতিমধ্যে লোড না হয়, তাহলে Unit4Lesson2 প্রকল্পটি লোড করুন।
- প্রকল্পটির নাম পরিবর্তন করুন Unit4Lesson3।

'A' অক্ষরে ড্রাইভ করার জন্য প্রকল্পের প্রবাহ
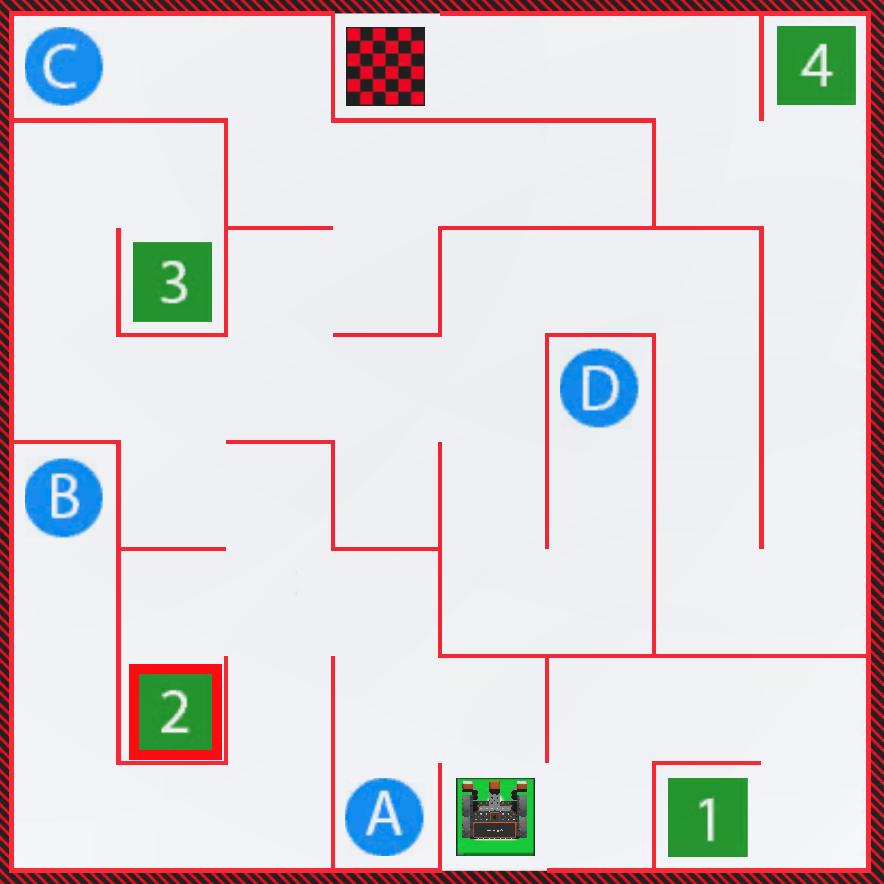
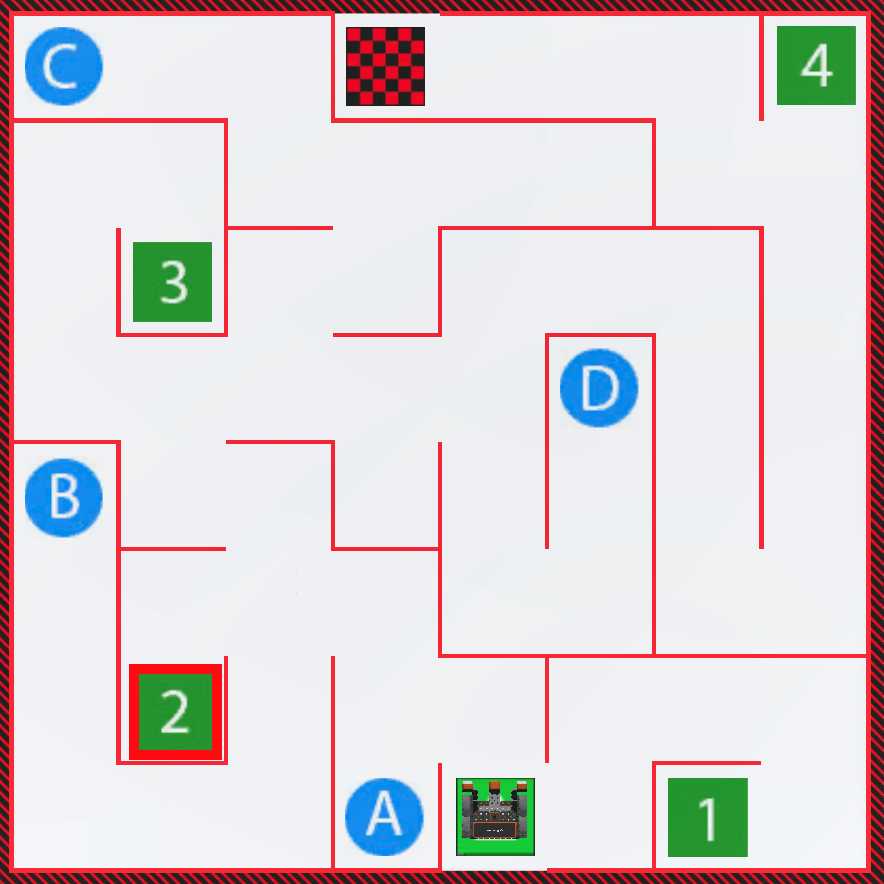
আগের পাঠে, VR রোবটটি Wall Maze Playgroundএ 'A' অক্ষরের দিকে গাড়ি চালিয়েছিল।

-
Wall Maze Playgroundএ 'A' অক্ষরে ড্রাইভ করার জন্য প্রকল্পের প্রবাহ আরও ভালভাবে বুঝতে, আপনার পূর্ববর্তী প্রকল্পটি পরিবর্তন করে শুরু করুন অথবা এই বেস প্রকল্পের সাথে মেলে একটি নতুন প্রকল্প তৈরি করুন।
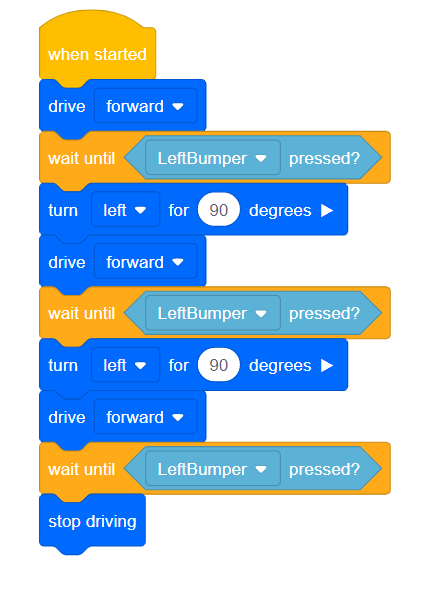
যখন একটি প্রকল্প একটি [অপেক্ষা করুন] ব্লক ব্যবহার করে, প্রকল্পের প্রোগ্রাম প্রবাহ এখনও একই টপ-টু-বটম ক্রম অনুসরণ করে। [অপেক্ষা করুন] ব্লক প্রোগ্রামটিকে একটি নির্দিষ্ট বিন্দুতে "পজ" করার অনুমতি দেয়, যতক্ষণ না [অপেক্ষা করুন] এর ভিতরের শর্তটি পূরণ না হয় (সত্য প্রতিবেদন করে)।
ব্লকের ভিতরের শর্ত, যেমন [অপেক্ষা করুন] ব্লক, ব্যবহারকারীকে প্রোগ্রাম প্রবাহকে "নিয়ন্ত্রণ" করতে দেয়। উদাহরণস্বরূপ, [অপেক্ষা করুন পর্যন্ত] ব্লকের সাথে, প্রোগ্রাম প্রবাহ থামবে এবং শর্ত পূরণ না হওয়া পর্যন্ত "অপেক্ষা করুন" এবং পরবর্তী ব্লকে যাওয়ার আগে সত্য রিপোর্ট করবে।
'A' অক্ষরে VR রোবট চালানোর এই কোডে, VR রোবটটি এগিয়ে যাবে যতক্ষণ না বাম বাম্পার টিপে রাখার অবস্থা সত্য হয়। একটি শর্ত, যেমন এই উদাহরণে বাম বাম্পার চাপা হচ্ছে, সর্বদা একটি সত্য বা মিথ্যা মান রিপোর্ট করে।

আপনার তথ্যের জন্য
প্রজেক্ট স্টেপিং বৈশিষ্ট্য আপনাকে কমান্ডের প্রবাহের একটি ভিজ্যুয়াল উপস্থাপনা প্রদান করে কারণ সেগুলি একটি প্রকল্পের মধ্যে কার্যকর করা হচ্ছে। যখন আপনি একটি VEXcode VR প্রকল্পের সমস্যা সমাধান বা ডিজাইন করার চেষ্টা করছেন তখন এটি আপনাকে গুরুত্বপূর্ণ চাক্ষুষ সংকেত প্রদান করতে পারে।

'2' নম্বরে ড্রাইভ করুন
এই পাঠে, প্রকল্পটি ওয়াল মেজ খেলার মাঠতে VR রোবট ড্রাইভ নম্বর '2'-এর জন্য সম্পাদনা করা হবে!
-
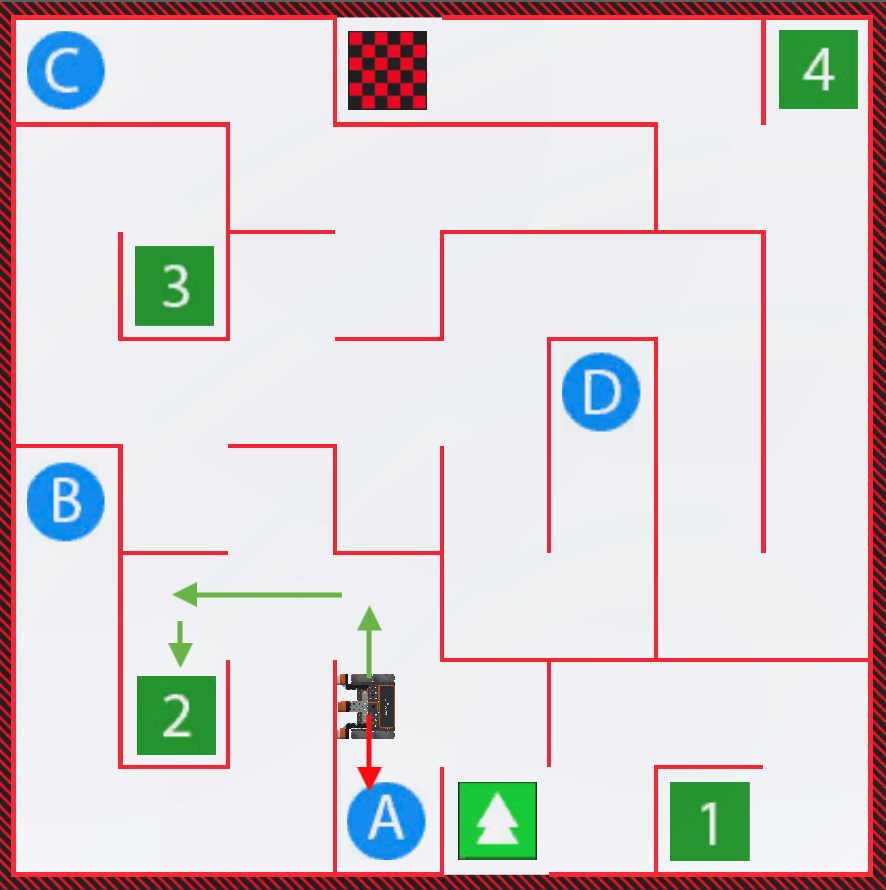
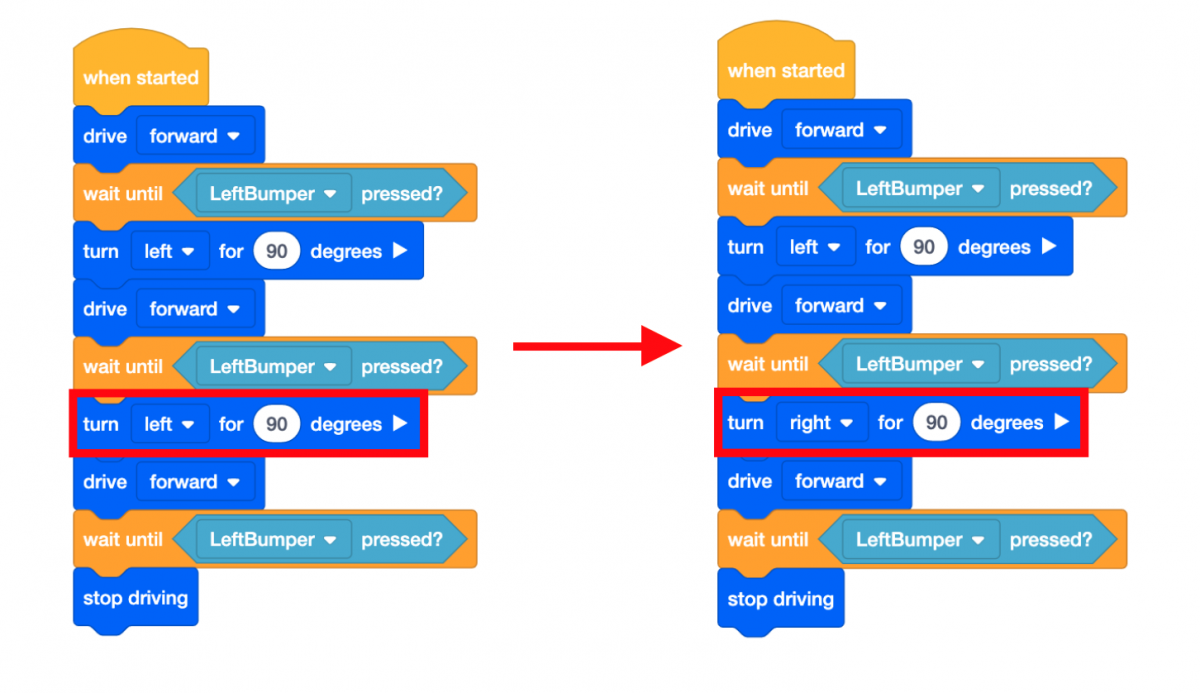
পাঠ ২-এর প্রকল্পটিতে VR রোবটটি 'A' অক্ষরে গাড়ি চালানোর জন্য বাম দিকে ঘুরছে। '২' নম্বরটিতে নেভিগেট করার জন্য, ভিআর রোবটটিকে ডানদিকে ঘুরতে হবে, সামনের দিকে গাড়ি চালাতে হবে এবং তারপর বাম দিকে ঘুরতে হবে।
-
দ্বিতীয় [Turn for] ব্লকের দিক বাম পরিবর্তে ডানে পরিবর্তন করুন।
- Wall Maze খেলার মাঠ চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
-
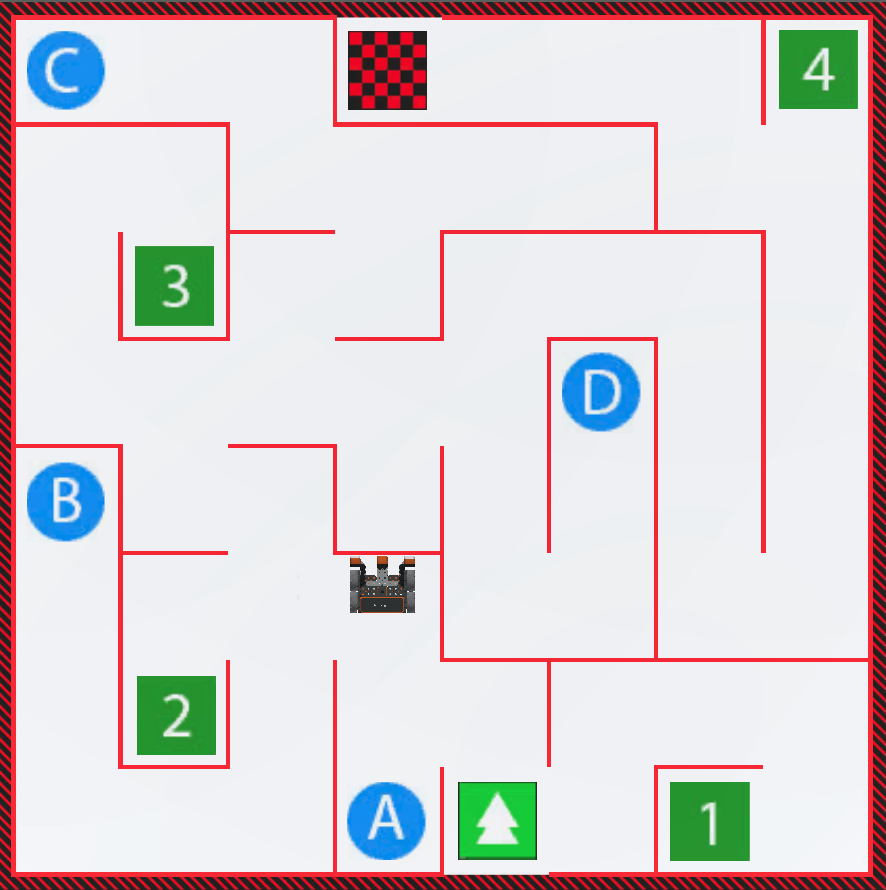
দেখুন ভিআর রোবটটি '২' নম্বর দিকে গাড়ি চালাতে শুরু করেছে, কিন্তু একটি দেয়ালে থামছে। সুতরাং, ভিআর রোবটটি যখন দেয়ালে চাপ দেয় তখন থামার পরিবর্তে বাম দিকে ঘুরতে হয়।
-
খেলার মাঠ রিসেট করতে "রিসেট" বোতামটি নির্বাচন করুন এবং VR রোবটটিকে তার শুরুর অবস্থানে ফিরিয়ে আনুন।

-
VR রোবটকে '2' নম্বরে চালিত করার জন্য [ড্রাইভিং বন্ধ করুন] ব্লকটি সরিয়ে নিম্নলিখিত কমান্ড দিয়ে কোডটি সম্পাদনা করুন।
- Wall Maze খেলার মাঠ চালু করুন যদি এটি ইতিমধ্যে খোলা না থাকে এবং প্রকল্পটি চালান।
-
Wall Maze Playgroundএ '2' নম্বরে VR রোবট ড্রাইভ দেখুন!

- খেলার মাঠ রিসেট করতে "রিসেট" বোতামটি নির্বাচন করুন এবং VR রোবটটিকে তার শুরুর অবস্থানে ফিরিয়ে আনুন।
এই পাঠের বাকি অংশটি চালিয়ে যেতে পরবর্তী বোতামটি নির্বাচন করুন।