
Lição 3: Dirigir até ser pressionado
Agora que você criou um projeto VEXcode VR para navegar o robô VR até a letra ‘A’ no Wall Maze Playground, expandirá suas habilidades usando condicionais e valores de sensores. Nesta lição, você navegará pelo robô VR até o número ‘2‘ no Wall Maze Playground e, em seguida, explorará por que blocos adicionais são necessários para dirigir até a letra ‘B.’ No mini-desafio, você aplicará essas habilidades para navegar desde o início do Labirinto da Parede até o número ‘3’.

Resultados de Aprendizagem
- Identifique que uma condição sempre relata um valor VERDADEIRO ou FALSO.
- Descreva o fluxo do programa num projeto que tenha uma unidade de robô VR para a frente até que o sensor do pára-choques seja pressionado.
- Descreva por que as condições são usadas em projetos.
- Identifique como usar o recurso Etapa para destacar a execução do programa.
- Explique por que usar o recurso Etapa é útil para solucionar problemas e rastrear o fluxo de um projeto.
Mudar o nome do projeto
- Se o projeto da lição anterior ainda não estiver carregado, carregue o projeto Unit4Lesson2.
- Renomeie o projeto Unit4Lesson3.

Fluxo do Projeto a Conduzir à Letra ‘A’
Na lição anterior, o robô de RV dirigiu até a letra ‘A’ no Wall Maze Playground.

-
Para entender melhor o fluxo do projeto para dirigir com a letra ‘A’ no Wall Maze Playground, comece modificando o seu projeto anterior ou crie um novo projeto para corresponder a este projeto base.
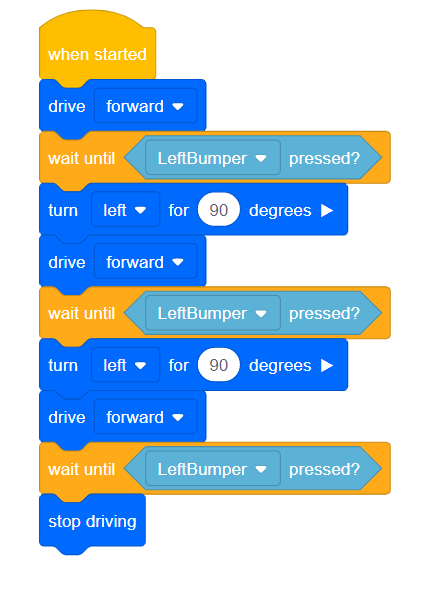
Quando um projeto usa um bloco [Wait until], o fluxo do programa do projeto ainda segue a mesma sequência de cima para baixo. O bloco [Wait until] permite que o fluxo do programa "pause" em um determinado ponto, até que a condição dentro do [Wait until] seja atendida (relatórios TRUE).
As condições dentro dos blocos, como os blocos [Aguarde até], permitem ao utilizador "controlar" o fluxo do programa. Por exemplo, com o bloco [Wait until], o fluxo do programa fará uma pausa e "aguardará até" que a condição seja atendida e relatará TRUE, antes de passar para o próximo bloco.
Neste código para conduzir o Robô VR à letra ‘A’, o Robô VR avançará até que a condição do Para-choque Esquerdo sendo pressionado seja VERDADEIRA. Uma condição, como o Para-choque Esquerdo sendo pressionado neste exemplo, sempre informa um valor VERDADEIRO ou FALSO.

Para sua informação
O recurso Project Stepping fornece uma representação visual do fluxo dos comandos à medida que eles são executados dentro de um projeto. Isso pode fornecer dicas visuais importantes ao tentar solucionar problemas ou criar um projeto VEXcode VR.

Dirija para o número '2'
Nesta Lição, o projeto será editado para que o Robô VR dirija para o número ‘2’ no Wall Maze Playground!

-
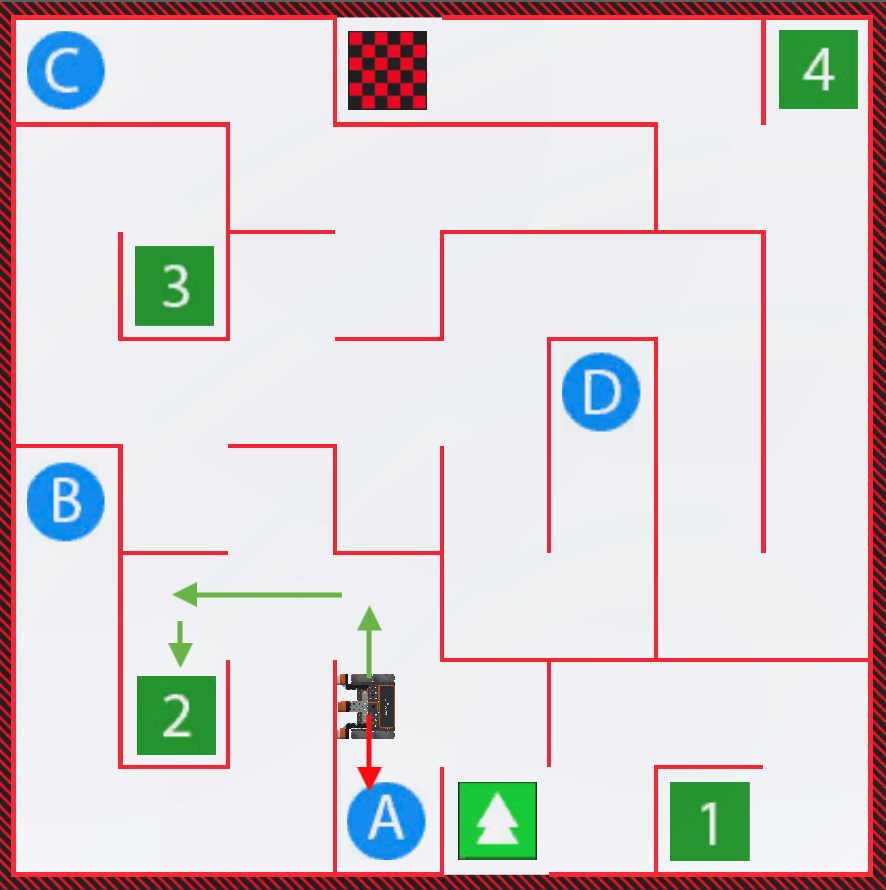
O projeto da Lição 2 tem o Robô VR virando à esquerda para dirigir à letra ‘A’. Para navegar até o número ‘2‘, o Robô VR terá que virar à direita, dirigir para frente e depois virar à esquerda.
-
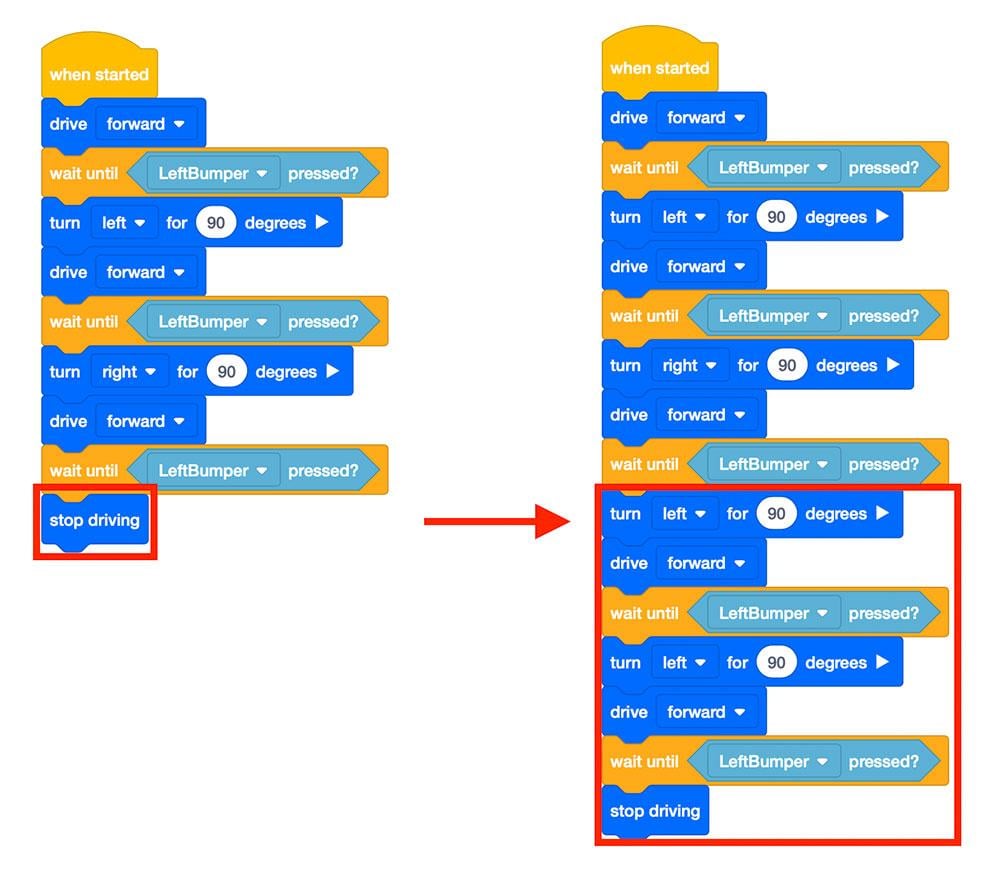
Mude a direção do segundo bloco [Vire para] para a direita em vez da esquerda.

- Inicie o Wall Maze Playground, se ainda não estiver aberto, e execute o projeto.
-
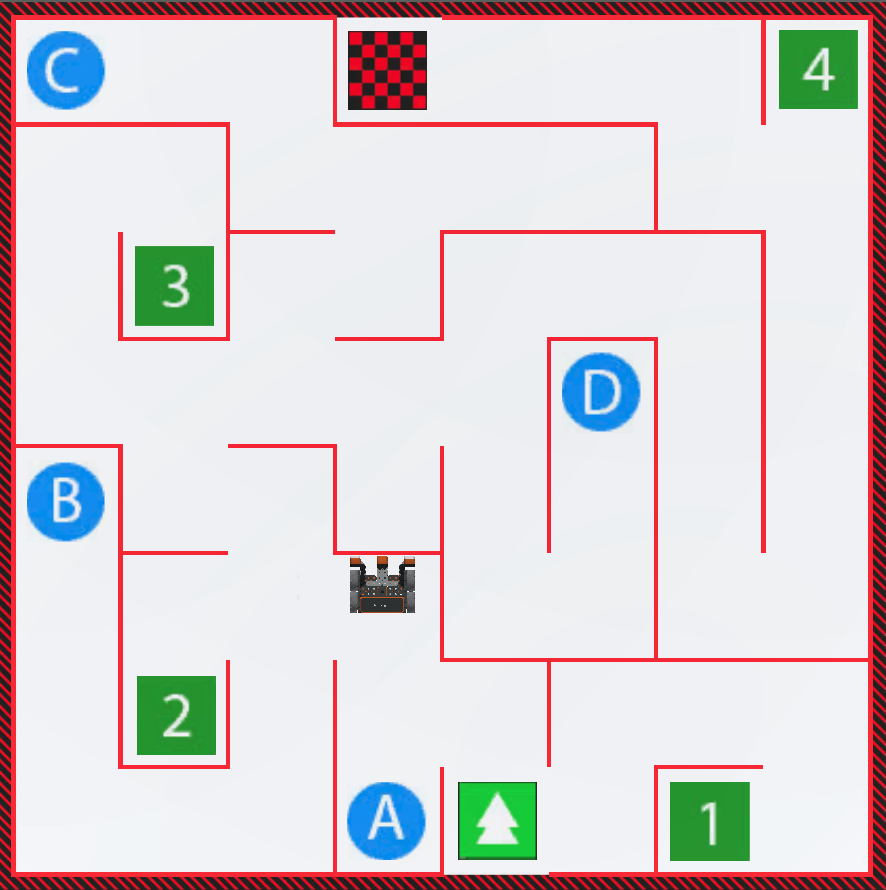
Veja o robô VR começar a conduzir até ao número "2", mas pare numa parede. Assim, o Robô VR precisa virar à esquerda assim que pressionar contra a parede em vez de parar.
-
Selecione o botão "Reset" para reiniciar o Playground e mover o Robô VR de volta para a posição inicial.

-
Edite o código removendo o bloco [Stop driving] e substituindo-o pelos seguintes comandos para conduzir o robô VR para o número ‘2’.
- Inicie o Wall Maze Playground, se ainda não estiver aberto, e execute o projeto.
-
Assista ao robô VR dirigir para o número ‘2’ no Wall Maze Playground!

- Selecione o botão "Reset" para reiniciar o Playground e mover o Robô VR de volta para a posição inicial.
Selecione o botão Seguinte para continuar com o resto desta lição.