
पाठ 3: दबाव पड़ने तक गाड़ी चलाना
अब जब आपने दीवार भूलभुलैया खेल का मैदानपर अक्षर 'ए' के लिए वीआर रोबोट को नेविगेट करने के लिए एक VEXcode वीआर प्रोजेक्ट बनाया है, तो आप सशर्त और सेंसर मूल्यों का उपयोग करके अपने कौशल का विस्तार करेंगे। इस पाठ में, आप वीआर रोबोट को दीवार भूलभुलैया खेल मैदानमें संख्या '2' तक ले जाएंगे, फिर पता लगाएंगे कि अक्षर 'बी' तक ड्राइव करने के लिए अतिरिक्त ब्लॉक की आवश्यकता क्यों है। मिनी-चैलेंज में, आप दीवार भूलभुलैया की शुरुआत से लेकर संख्या '3' तक नेविगेट करने के लिए इन कौशलों को लागू करेंगे।
सीखने के परिणाम
- पहचानें कि कोई शर्त हमेशा TRUE या FALSE मान रिपोर्ट करती है।
- एक प्रोजेक्ट में प्रोग्राम प्रवाह का वर्णन करें जिसमें VR रोबोट बम्पर सेंसर दबाए जाने तक आगे बढ़ता रहता है।
- वर्णन करें कि परियोजनाओं में शर्तों का उपयोग क्यों किया जाता है।
- प्रोग्राम निष्पादन को उजागर करने के लिए स्टेप सुविधा का उपयोग कैसे करें, इसकी पहचान करें।
- समझाएं कि चरण सुविधा का उपयोग समस्या निवारण और परियोजना के प्रवाह का पता लगाने में क्यों सहायक है।
परियोजना का नाम बदलें
- यदि पिछले पाठ का प्रोजेक्ट पहले से लोड नहीं है, तो Unit4Lesson2 प्रोजेक्ट लोड करें।
- प्रोजेक्ट का नाम बदलें Unit4Lesson3.

परियोजना का प्रवाह अक्षर 'ए' तक ले जाने के लिए
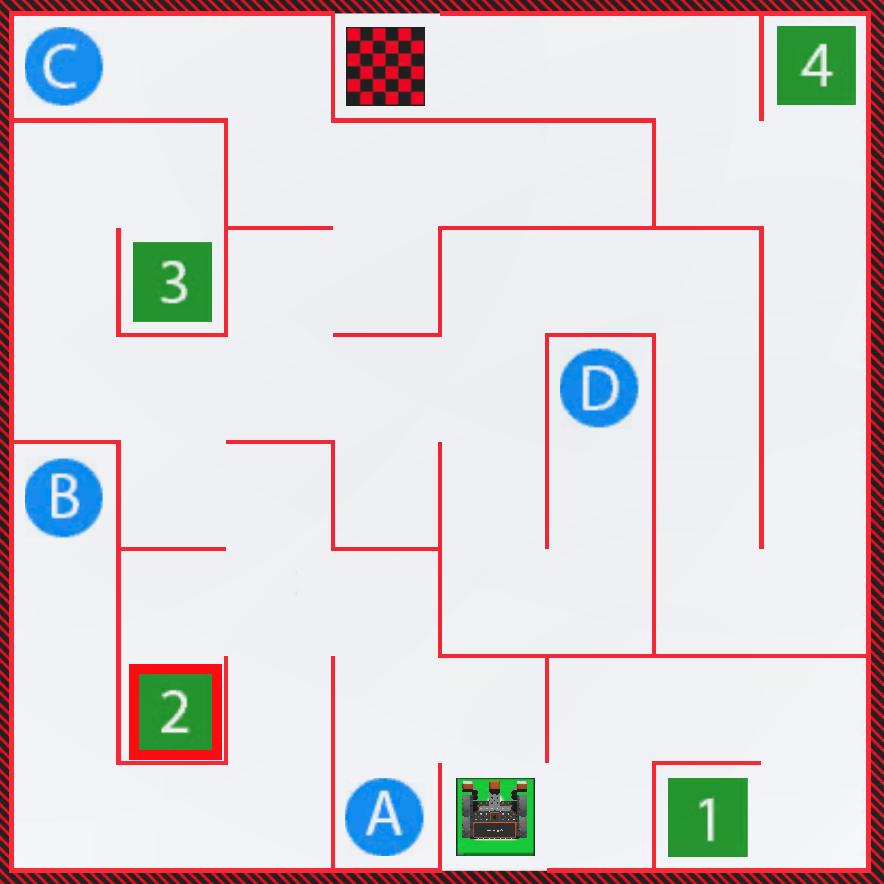
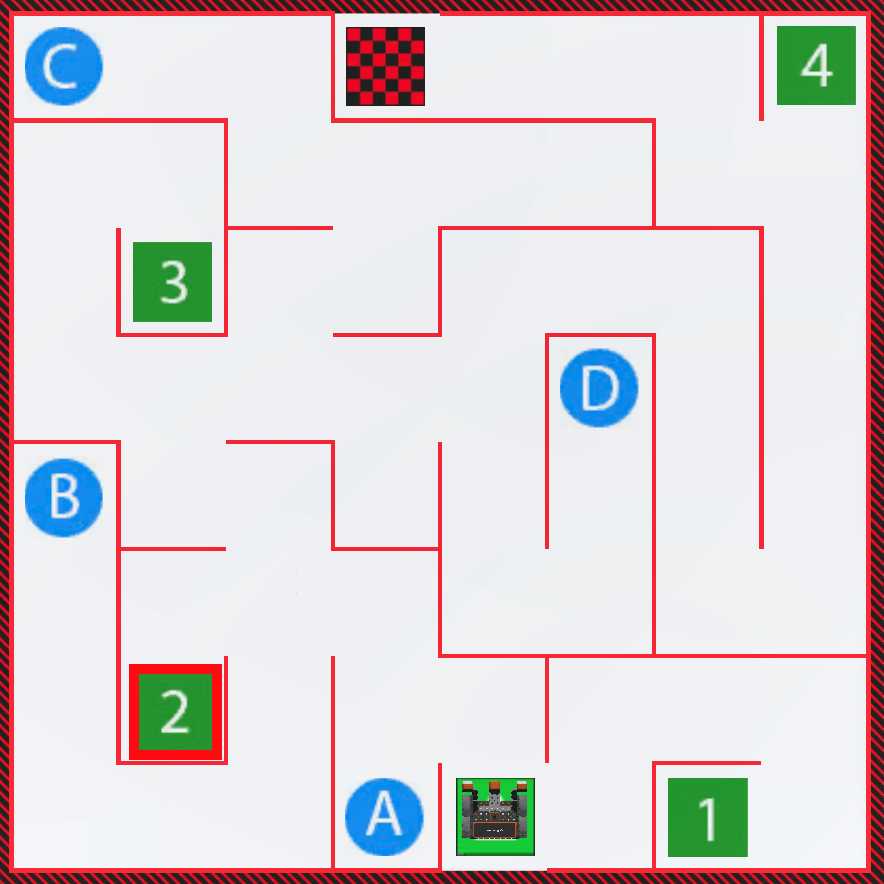
पिछले पाठ में, वीआर रोबोट दीवार भूलभुलैया खेल का मैदानपर अक्षर 'ए' तक चला गया।

-
दीवार भूलभुलैया खेल का मैदानपर अक्षर 'ए' के लिए ड्राइविंग के लिए परियोजना प्रवाह को बेहतर ढंग से समझने के लिए, अपने पिछले प्रोजेक्ट को संशोधित करके शुरू करें या इस आधार परियोजना से मेल खाने के लिए एक नया प्रोजेक्ट बनाएं।
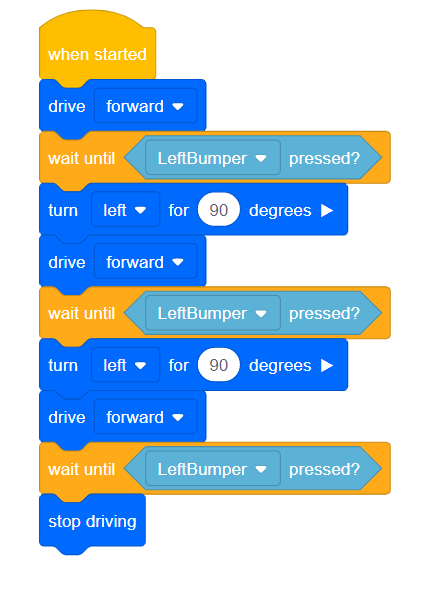
जब कोई प्रोजेक्ट [Wait until] ब्लॉक का उपयोग करता है, तो प्रोजेक्ट का प्रोग्राम प्रवाह अभी भी उसी ऊपर से नीचे के अनुक्रम का अनुसरण करता है। [Wait until] ब्लॉक प्रोग्राम प्रवाह को एक निश्चित बिंदु पर "रोकने" की अनुमति देता है, जब तक कि [Wait until] के अंदर की शर्त पूरी नहीं हो जाती (TRUE रिपोर्ट करता है)।
ब्लॉक के अंदर की शर्तें, जैसे [प्रतीक्षा करें] ब्लॉक, उपयोगकर्ता को प्रोग्राम प्रवाह को "नियंत्रित" करने की अनुमति देती हैं। उदाहरण के लिए, [Wait until] ब्लॉक के साथ, प्रोग्राम प्रवाह रुक जाएगा और "तब तक प्रतीक्षा करेगा" जब तक कि शर्त पूरी न हो जाए और अगले ब्लॉक पर जाने से पहले TRUE रिपोर्ट न कर दे।
वीआर रोबोट को अक्षर 'ए' तक ले जाने के लिए इस कोड में, वीआर रोबोट तब तक आगे बढ़ेगा जब तक कि बाएं बम्पर के दबाए जाने की स्थिति सत्य न हो जाए। एक स्थिति, जैसे कि इस उदाहरण में बायां बम्पर दबाया जाना, हमेशा TRUE या FALSE मान की रिपोर्ट करता है।

आपकी जानकारी के लिए
प्रोजेक्ट स्टेपिंग सुविधा आपको प्रोजेक्ट के भीतर निष्पादित किए जा रहे आदेशों के प्रवाह का दृश्य प्रतिनिधित्व प्रदान करती है। जब आप VEXcode VR प्रोजेक्ट का समस्या निवारण या डिजाइन करने का प्रयास कर रहे हों तो यह आपको महत्वपूर्ण दृश्य संकेत प्रदान कर सकता है।

नंबर '2' तक ड्राइव करें
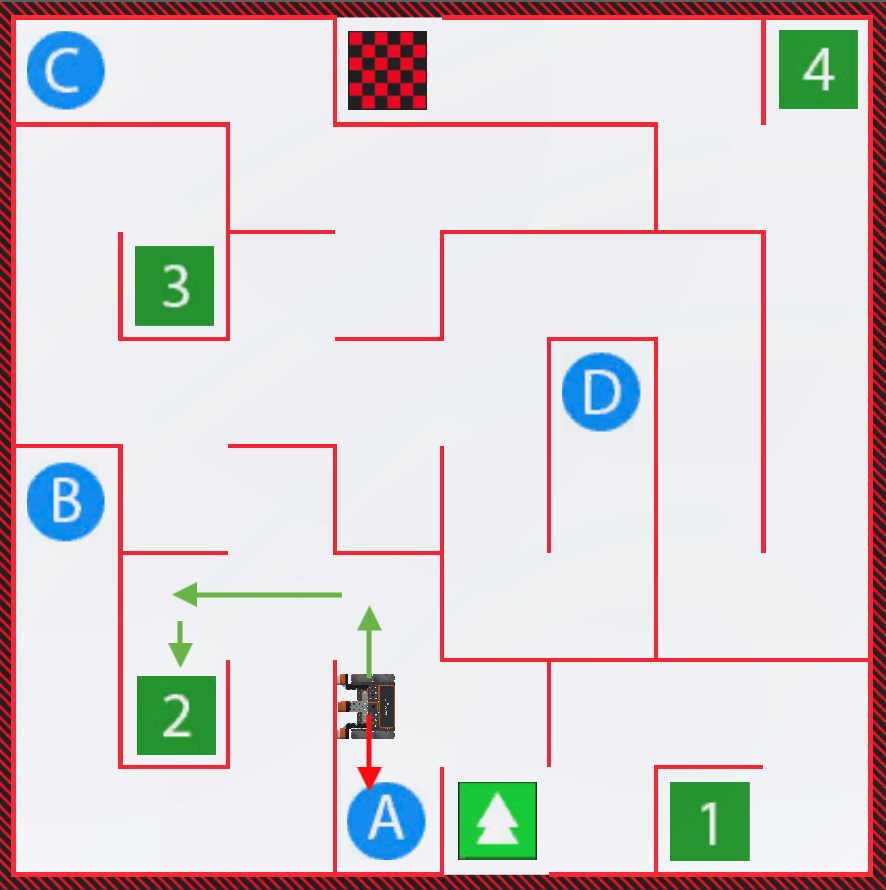
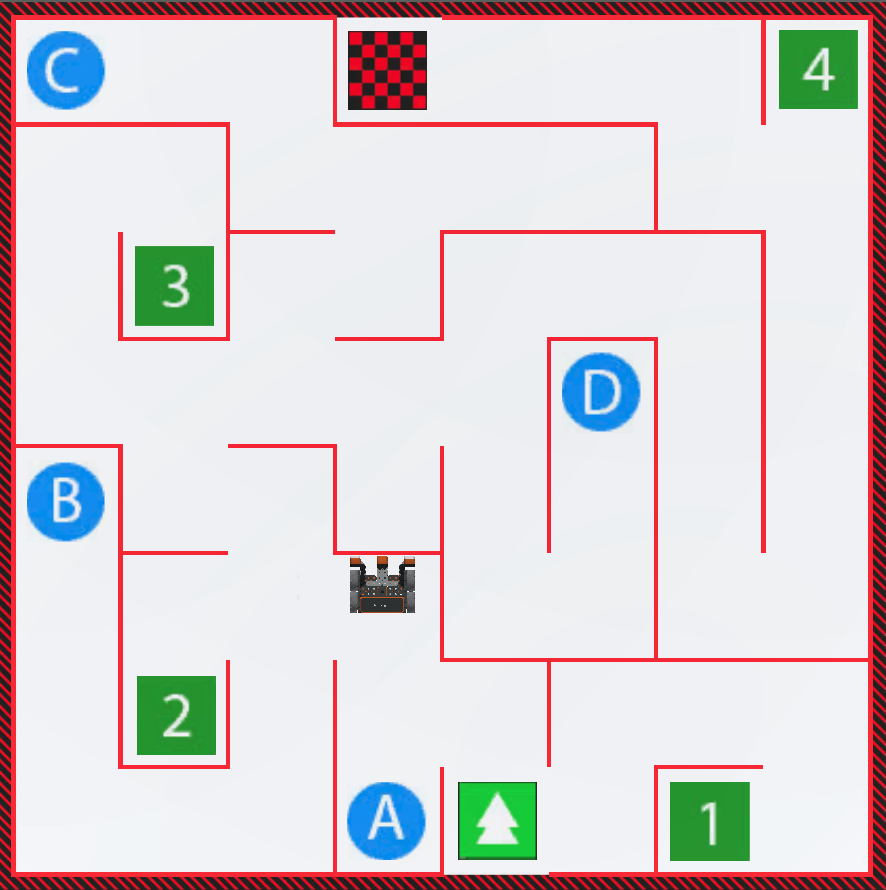
इस पाठ में, परियोजना को संपादित किया जाएगा ताकि वीआर रोबोट दीवार भूलभुलैया खेल का मैदानपर संख्या '2' तक ड्राइव कर सके!
-
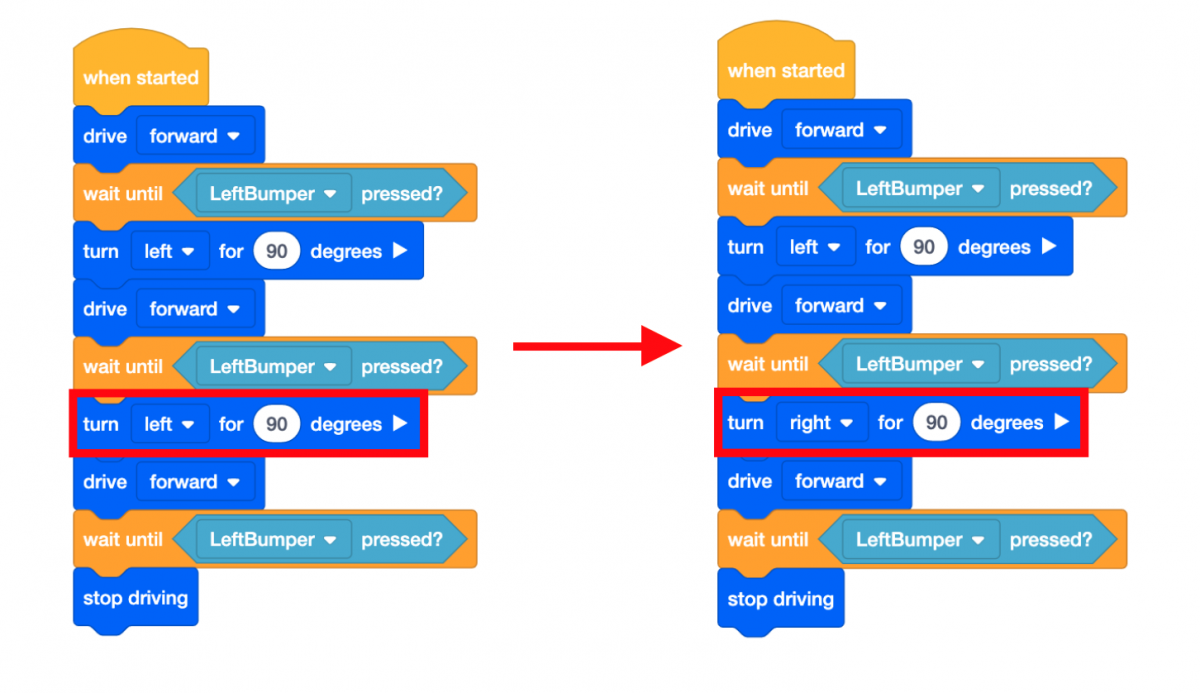
पाठ 2 के प्रोजेक्ट में वीआर रोबोट को अक्षर 'ए' तक जाने के लिए बायीं ओर मुड़ना है। नंबर '2' तक जाने के लिए, वीआर रोबोट को दाईं ओर मुड़ना होगा, आगे बढ़ना होगा, और फिर बाईं ओर मुड़ना होगा।
-
दूसरे ब्लॉक की दिशा को बायीं ओर के बजाय दायीं ओर बदलें।
- यदि यह पहले से खुला नहीं है तो वॉल मेज़ प्लेग्राउंड लॉन्च करें और प्रोजेक्ट चलाएं।
-
देखिए कि वी.आर. रोबोट नंबर '2' की ओर बढ़ना शुरू करता है, लेकिन एक दीवार पर रुक जाता है। इस प्रकार, वीआर रोबोट को दीवार से टकराने पर रुकने के बजाय बाईं ओर मुड़ना पड़ता है।
-
खेल के मैदान को रीसेट करने और वीआर रोबोट को प्रारंभिक स्थिति में वापस ले जाने के लिए "रीसेट" बटन का चयन करें।

-
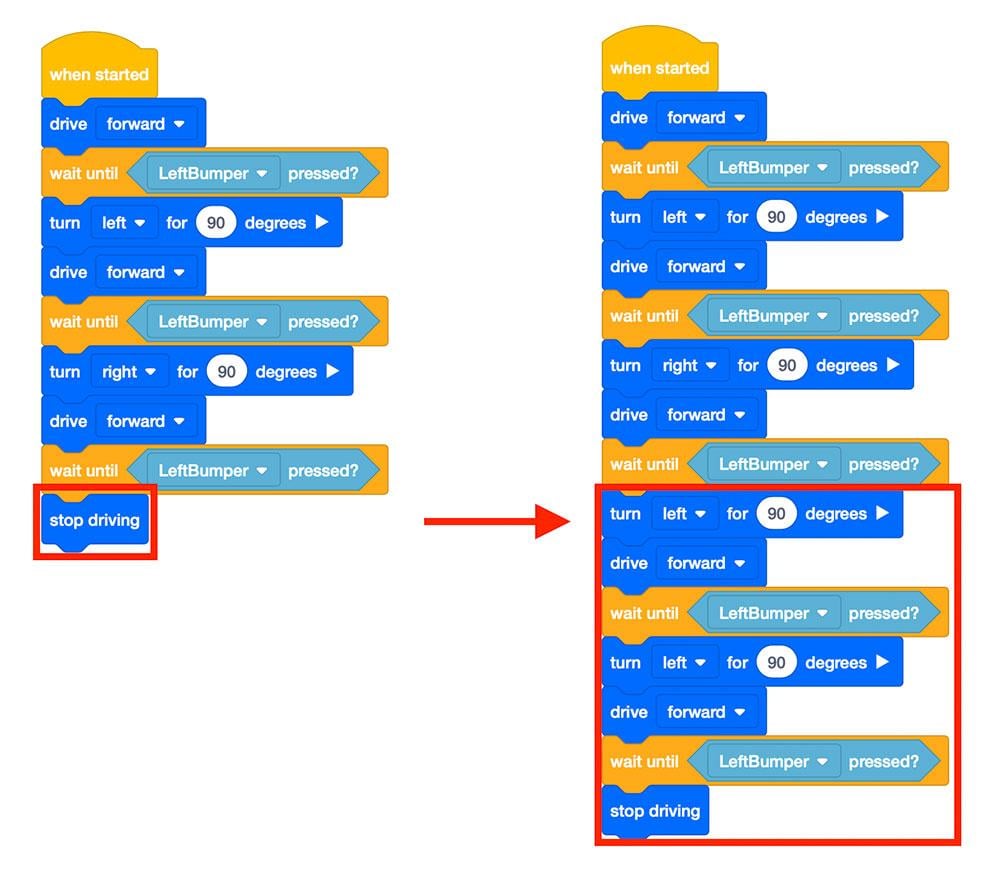
वीआर रोबोट को संख्या '2' तक ले जाने के लिए [ड्राइविंग रोकें] ब्लॉक को हटाकर और इसे निम्नलिखित कमांड से प्रतिस्थापित करके कोड को संपादित करें।
- यदि यह पहले से खुला नहीं है तो वॉल मेज़ प्लेग्राउंड लॉन्च करें और प्रोजेक्ट चलाएं।
-
दीवार भूलभुलैया खेल का मैदानपर नंबर '2' के लिए वी.आर. रोबोट ड्राइव देखें!

- खेल के मैदान को रीसेट करने और वीआर रोबोट को प्रारंभिक स्थिति में वापस ले जाने के लिए "रीसेट" बटन का चयन करें।
इस पाठ के शेष भाग को जारी रखने के लिए अगला बटन का चयन करें।