
Leçon 3 : Conduire jusqu'à la pression
Maintenant que vous avez créé un projet VEXcode VR pour diriger le robot VR jusqu'à la lettre « A » sur le Wall Maze Playground, vous allez développer vos compétences en utilisant des conditions et des valeurs de capteur. Dans cette leçon, vous dirigerez le robot VR jusqu'au numéro « 2 » dans le labyrinthe mural Playground, puis vous découvrirez pourquoi des blocs supplémentaires sont nécessaires pour atteindre la lettre « B ». Dans le mini-challenge, vous appliquerez ces compétences pour naviguer du début du labyrinthe mural au nombre « 3 ».
Résultats d'apprentissage
- Identifiez qu'une condition rapporte toujours une valeur VRAIE ou FAUSSE.
- Décrivez le déroulement du programme dans un projet qui a un robot VR qui avance jusqu'à ce que le capteur de pare-chocs soit enfoncé.
- Décrire pourquoi les conditions sont utilisées dans les projets.
- Identifiez comment utiliser la fonction Step pour mettre en évidence l'exécution du programme.
- Expliquez pourquoi l'utilisation de la fonctionnalité Étape est utile pour le dépannage et le suivi du flux d'un projet.
Renommer le projet
- Si le projet de la leçon précédente n'est pas déjà chargé, chargez le projet Unit4Lesson2.
- Renommer le projet Unit4Lesson3.

Flux du projet à conduire à la lettre « A »
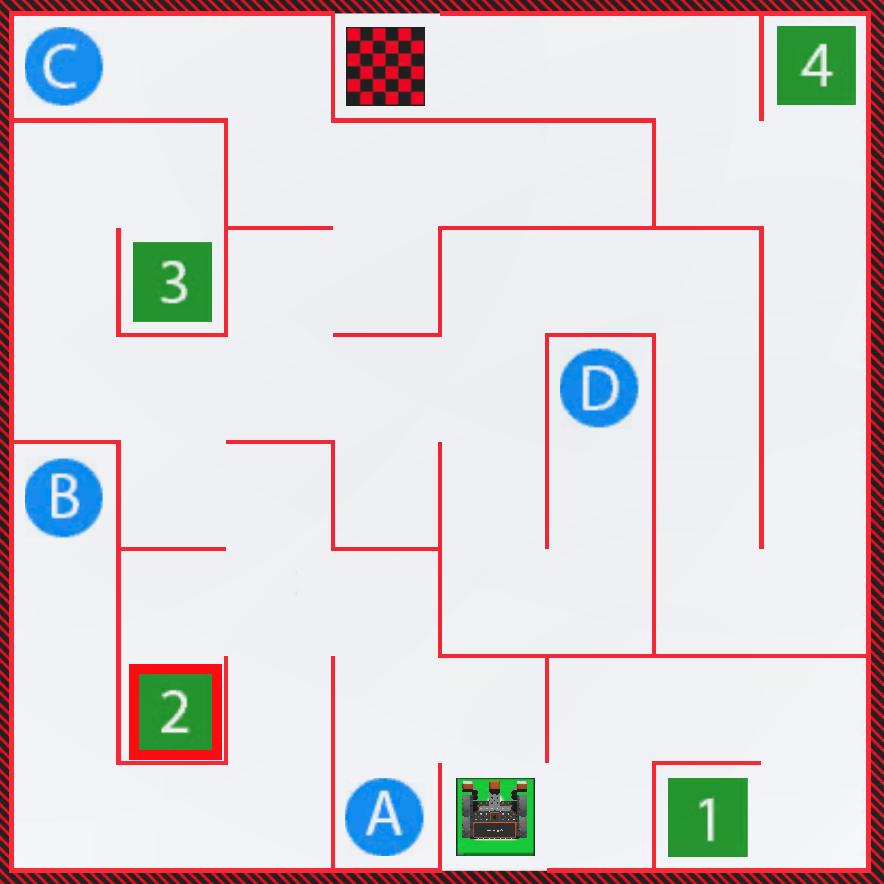
Dans la leçon précédente, le robot VR s'est rendu à la lettre « A » sur le Wall Maze Playground.

-
Pour mieux comprendre le déroulement du projet pour conduire jusqu'à la lettre « A » sur le Wall Maze Playground, commencez par modifier votre projet précédent ou créez un nouveau projet pour correspondre à ce projet de base.
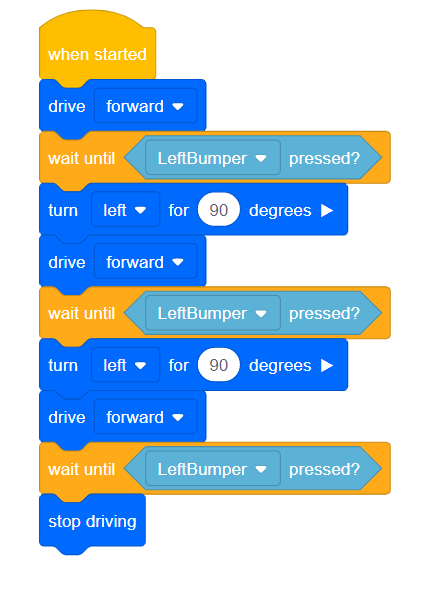
Lorsqu'un projet utilise un bloc [Attendre jusqu'à], le flux de programme du projet suit toujours la même séquence de haut en bas. Le bloc [Attendre jusqu'à] permet au flux de programme de « mettre en pause » à un certain point, jusqu'à ce que la condition à l'intérieur du [Attendre jusqu'à] soit remplie (rapporte VRAI).
Les conditions à l'intérieur des blocs, telles que [Attendre] les blocs, permettent à l'utilisateur de « contrôler » le flux du programme. Par exemple, avec le bloc [Attendre jusqu'à], le flux du programme fera une pause et « attendra jusqu'à ce que » la condition soit remplie et rapporte VRAI, avant de passer au bloc suivant.
Dans ce code pour conduire le robot VR à la lettre « A », le robot VR avancera jusqu'à ce que l'état du pare-chocs gauche soit activé. Une condition, telle que le pare-chocs gauche pressé dans cet exemple, rapporte toujours une valeur VRAIE ou FAUSSE.

Pour votre information
La fonctionnalité Project Stepping vous fournit une représentation visuelle du flux des commandes au fur et à mesure de leur exécution dans un projet. Cela peut vous fournir des indices visuels importants lorsque vous essayez de dépanner ou de concevoir un projet VEXcode VR.

Conduisez jusqu'au numéro « 2 »
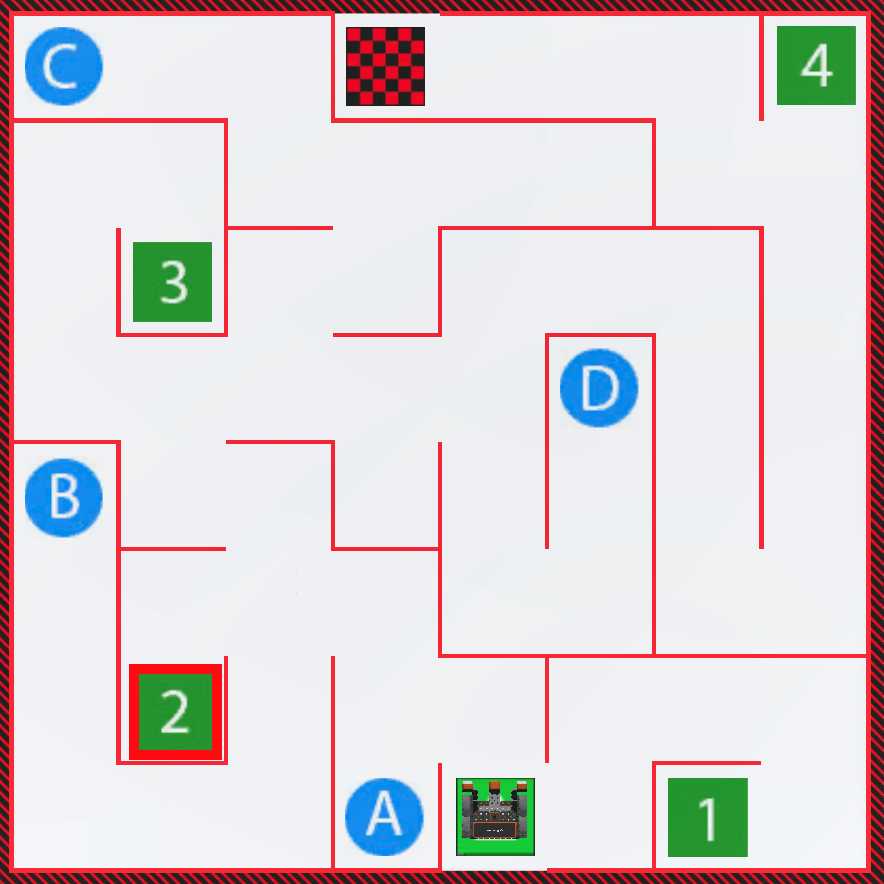
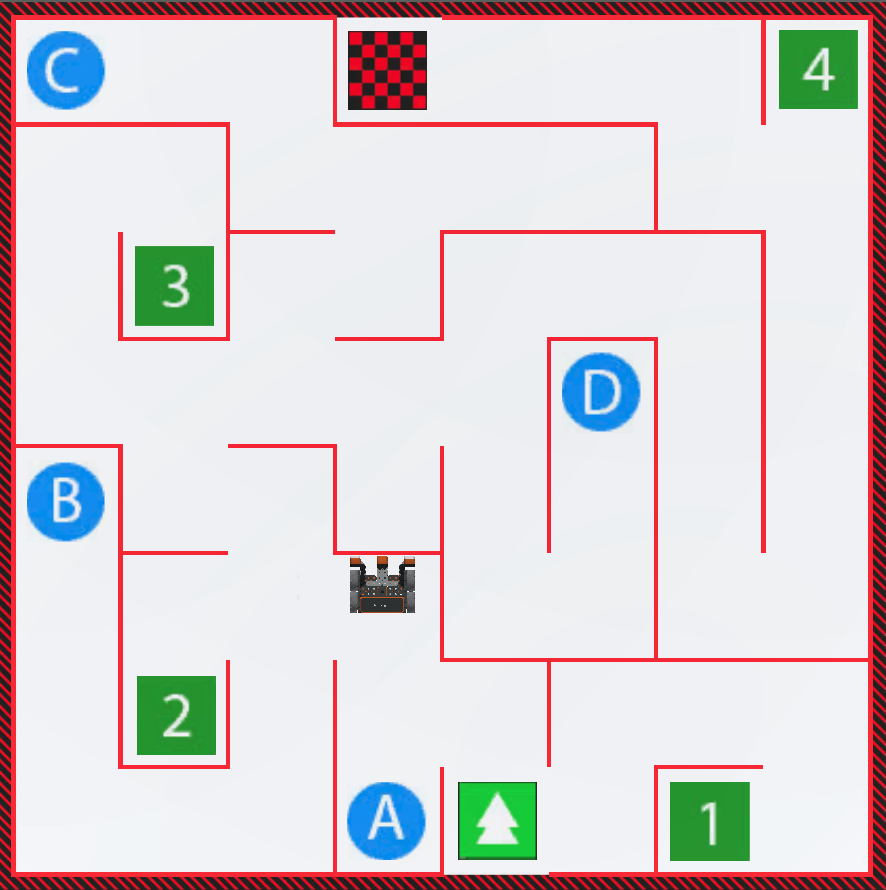
Dans cette leçon, le projet sera modifié pour que le robot VR se dirige vers le numéro « 2 » sur le Wall Maze Playground !
-
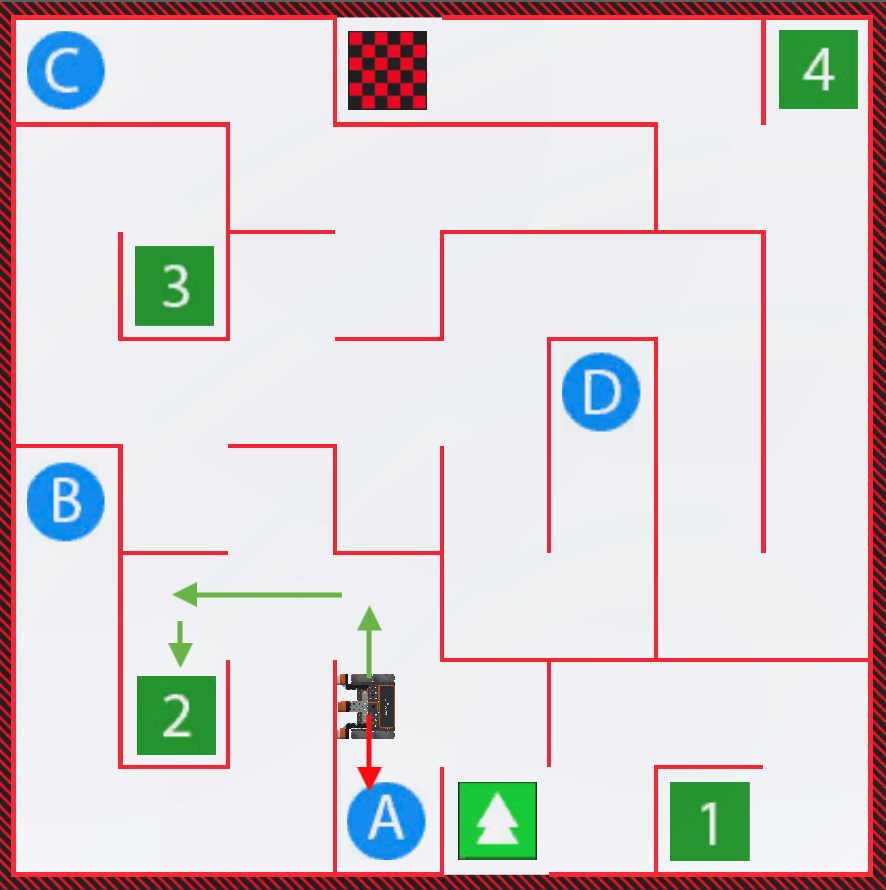
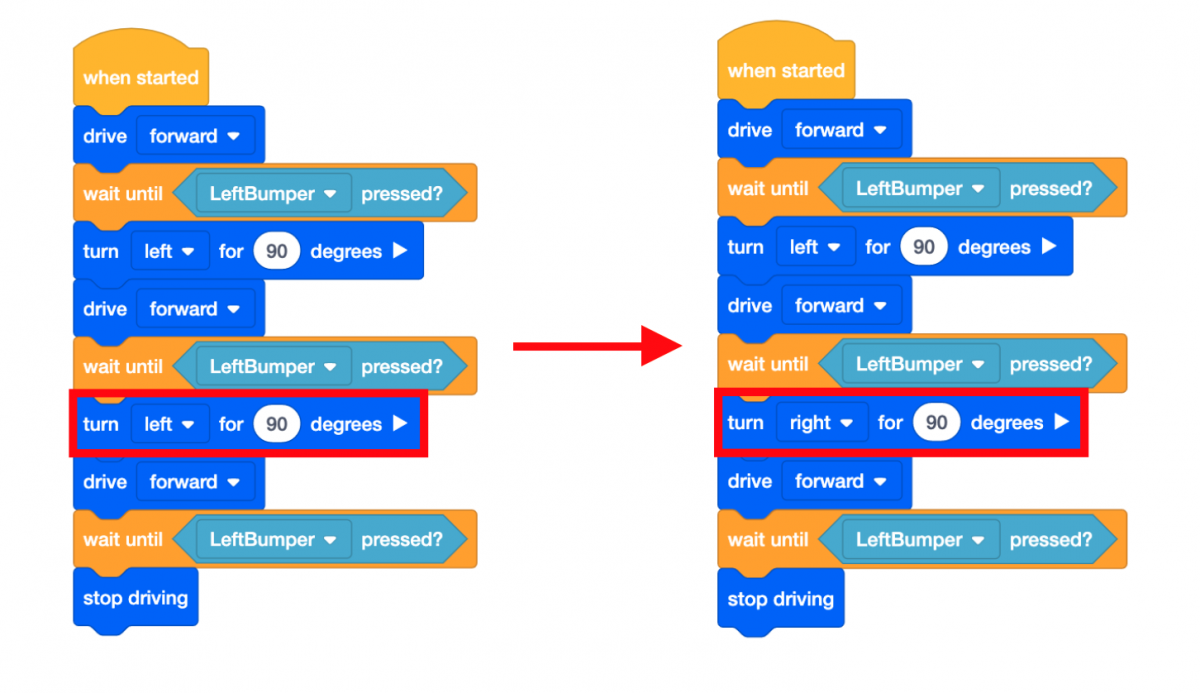
Le projet de la leçon 2 a le robot VR tournant à gauche pour conduire à la lettre « A ». Afin de naviguer jusqu'au numéro « 2 », le robot VR devra plutôt tourner à droite, avancer, puis tourner à gauche.
-
Changez la direction du deuxième bloc [Turn for] vers la droite au lieu de la gauche.
- Lancez le Wall Maze Playground s'il n'est pas déjà ouvert et exécutez le projet.
-
Regardez le robot VR commencer à rouler jusqu'au numéro « 2 », mais arrêtez-vous devant un mur. Ainsi, le robot VR doit tourner à gauche une fois qu'il appuie contre le mur au lieu de s'arrêter.
-
Sélectionnez le bouton « Réinitialiser » pour réinitialiser le terrain de jeu et ramener le robot VR à la position de départ.

-
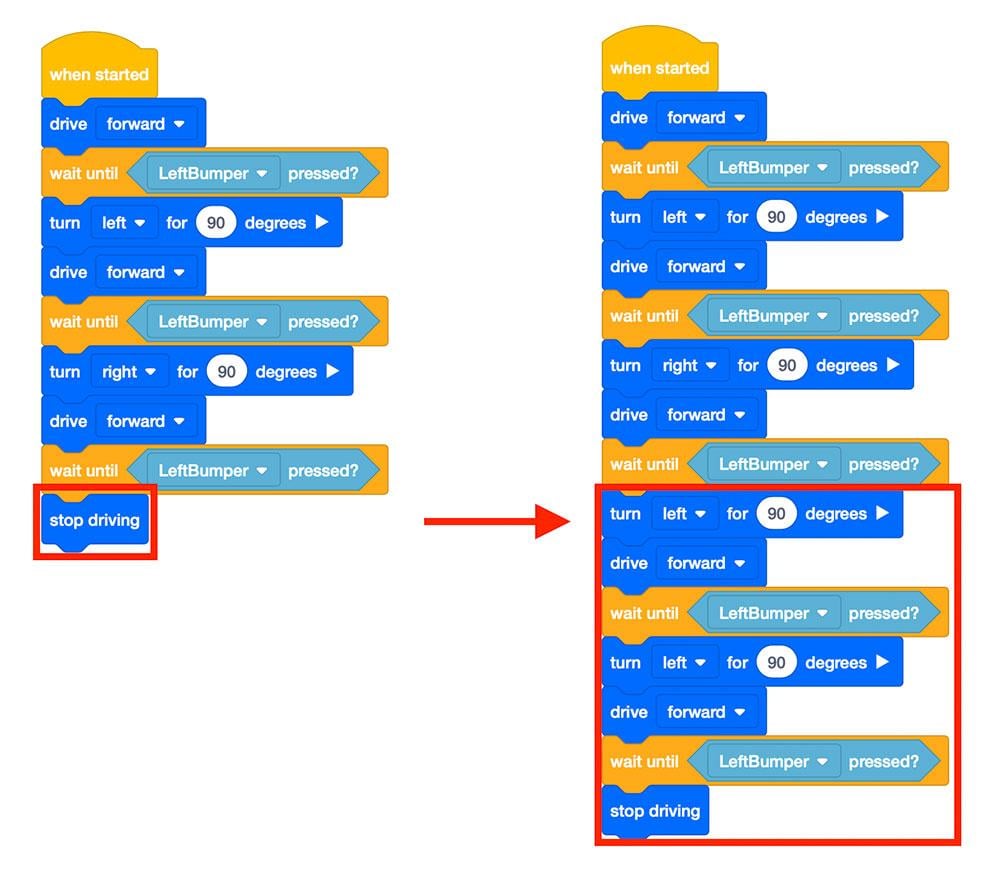
Modifiez le code en supprimant le bloc [Arrêter de conduire] et en le remplaçant par les commandes suivantes afin de conduire le robot VR au nombre « 2 ».
- Lancez le Wall Maze Playground s'il n'est pas déjà ouvert et exécutez le projet.
-
Regardez le robot VR se diriger vers le numéro « 2 » sur le Wall Maze Playground !

- Sélectionnez le bouton « Réinitialiser » pour réinitialiser le terrain de jeu et ramener le robot VR à la position de départ.
Sélectionnez le bouton Suivant pour continuer le reste de cette leçon.