
Lección 3: Conducir hasta ser presionado
Ahora que ha creado un proyecto VEXcode VR para navegar el robot VR hasta la letra "A" en el laberinto de pared Patio de juegos, ampliará sus habilidades usando condicionales y valores de sensores. En esta lección, navegarás con el robot VR hasta el número "2" en el laberinto de pared Patio de juegosy luego explorarás por qué se necesitan bloques adicionales para llegar a la letra "B". En el mini-reto, aplicarás estas habilidades para navegar desde el comienzo del laberinto de la pared hasta el número ‘3’.
Resultados de aprendizaje
- Identifica que una condición siempre reporta un valor VERDADERO o FALSO.
- Describa el flujo del programa en un proyecto que tiene un accionamiento de robot VR hacia adelante hasta que se presiona el sensor del parachoques.
- Describir por qué se utilizan las condiciones en los proyectos.
- Identifique cómo usar la función Paso para resaltar la ejecución del programa.
- Explica por qué usar la función Paso es útil para solucionar problemas y rastrear el flujo de un proyecto.
Cambiar el nombre del proyecto
- Si el proyecto de la lección anterior aún no está cargado, cargue el proyecto Unit4Lesson2.
- Cambie el nombre del proyecto Unit4Lesson3.

Flujo del proyecto para conducir a la letra ‘A’
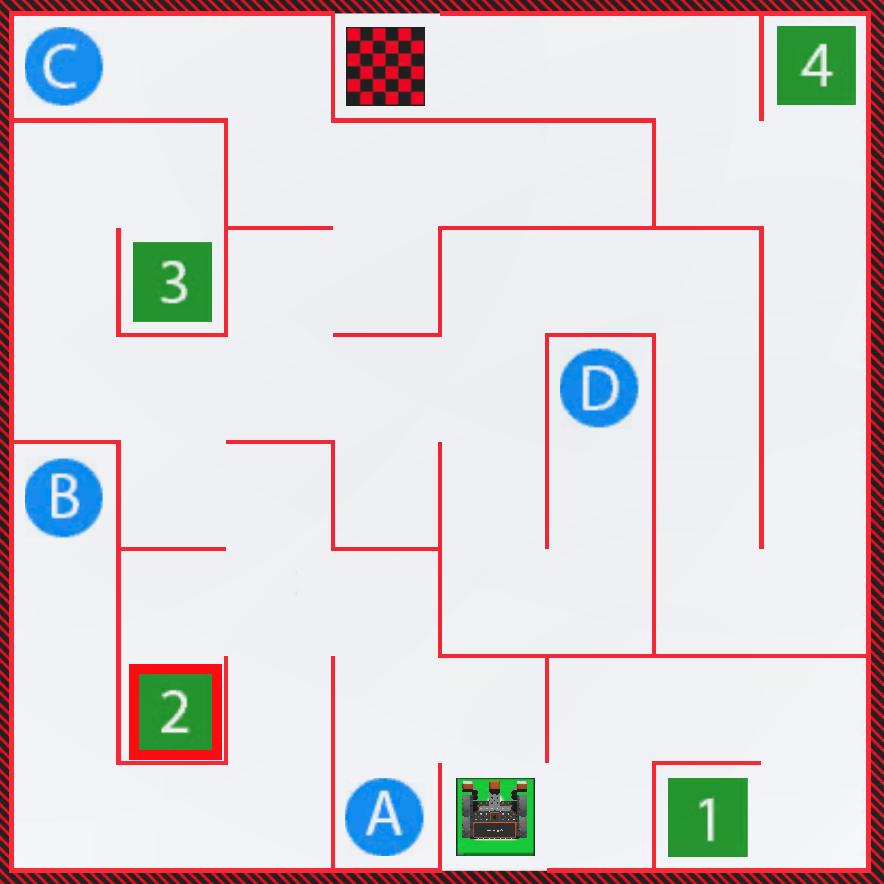
En la lección anterior, el robot VR se dirigió a la letra 'A' en el laberinto de pared Patio de juegos.

-
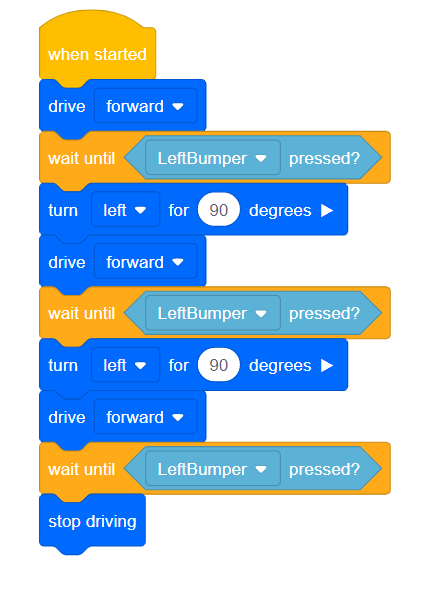
Para comprender mejor el flujo del proyecto para conducir hasta la letra ‘A’ en el Wall Maze Playground, comience modificando su proyecto anterior o cree un nuevo proyecto para que coincida con este proyecto base.
Cuando un proyecto utiliza un bloque [Esperar hasta], el flujo del programa del proyecto sigue la misma secuencia de arriba a abajo. El bloque [Esperar hasta] permite que el flujo del programa se "detenga" en un momento determinado, hasta que se cumpla la condición dentro de [Esperar hasta] (informa TRUE).
Las condiciones dentro de los bloques, como los bloques [Esperar hasta], permiten al usuario "controlar" el flujo del programa. Por ejemplo, con el bloque [Esperar hasta], el flujo del programa se detendrá y "esperará hasta" que se cumpla la condición y se informe como VERDADERO, antes de pasar al siguiente bloque.
En este código para conducir el Robot VR a la letra ‘A’, el Robot VR avanzará hasta que se cumpla la condición de que se presione el Parachoques Izquierdo. Una condición, como el parachoques izquierdo que se pulsa en este ejemplo, siempre informa de un valor VERDADERO o FALSO.

Para su información
La función Project Stepping le proporciona una representación visual del flujo de los comandos a medida que se ejecutan dentro de un proyecto. Esto puede proporcionarte importantes señales visuales cuando intentes solucionar problemas o diseñar un proyecto de VEXcode VR.

Conduce hasta el número '2'
En esta lección, se editará el proyecto para que el robot VR conduzca hasta el número "2" en el laberinto de pared ¡Patio de juegos!

-
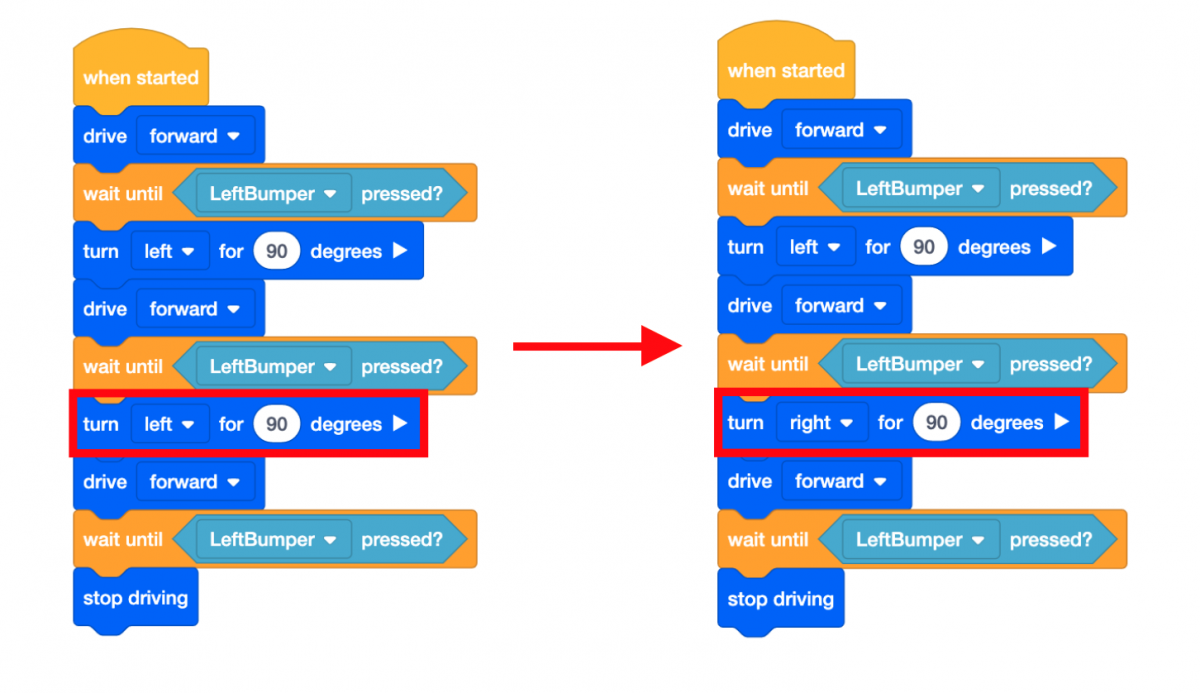
El proyecto de la Lección 2 tiene el robot de realidad virtual girando a la izquierda para conducir hasta la letra "A". Para llegar al número ‘2‘, el robot de realidad virtual tendrá que girar a la derecha, avanzar y luego girar a la izquierda.

-
Cambie la dirección del segundo bloque [Turn for] a la derecha en lugar de a la izquierda.
- Inicie el Wall Maze Playground si aún no está abierto y ejecute el proyecto.
-
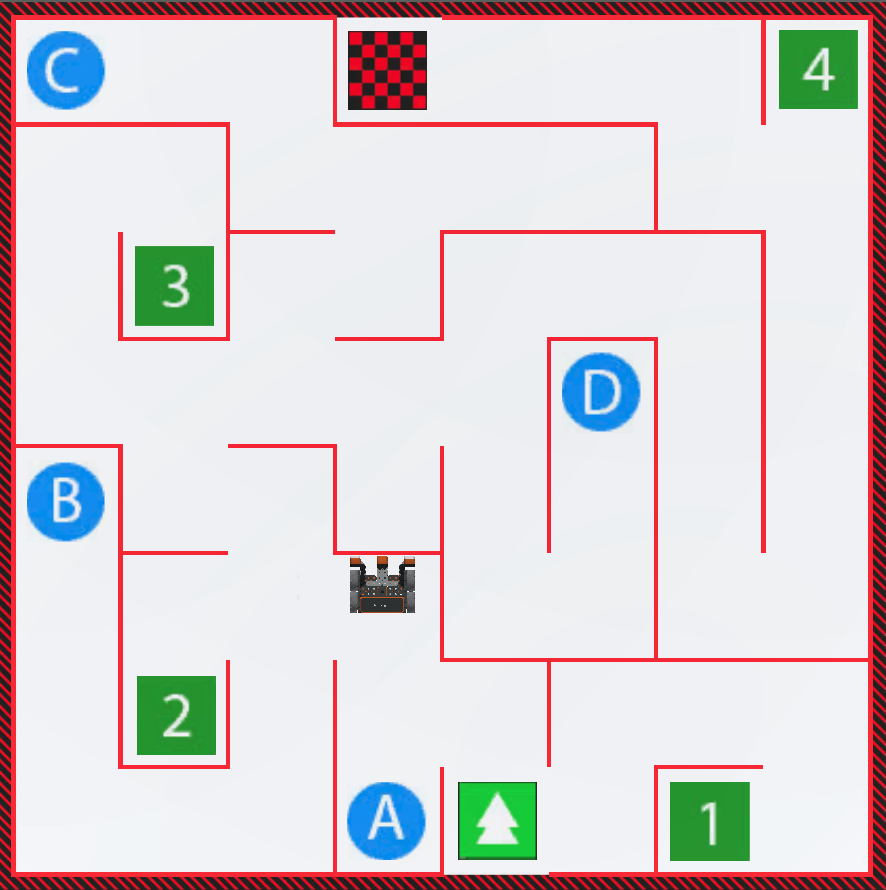
Observe cómo el robot VR comienza a conducir hasta el número ‘2’, pero deténgase en una pared. Por lo tanto, el robot VR debe girar a la izquierda una vez que presiona contra la pared en lugar de detenerse.
-
Seleccione el botón "Restablecer" para restablecer el patio de recreo y mover el robot VR de nuevo a la posición inicial.

-
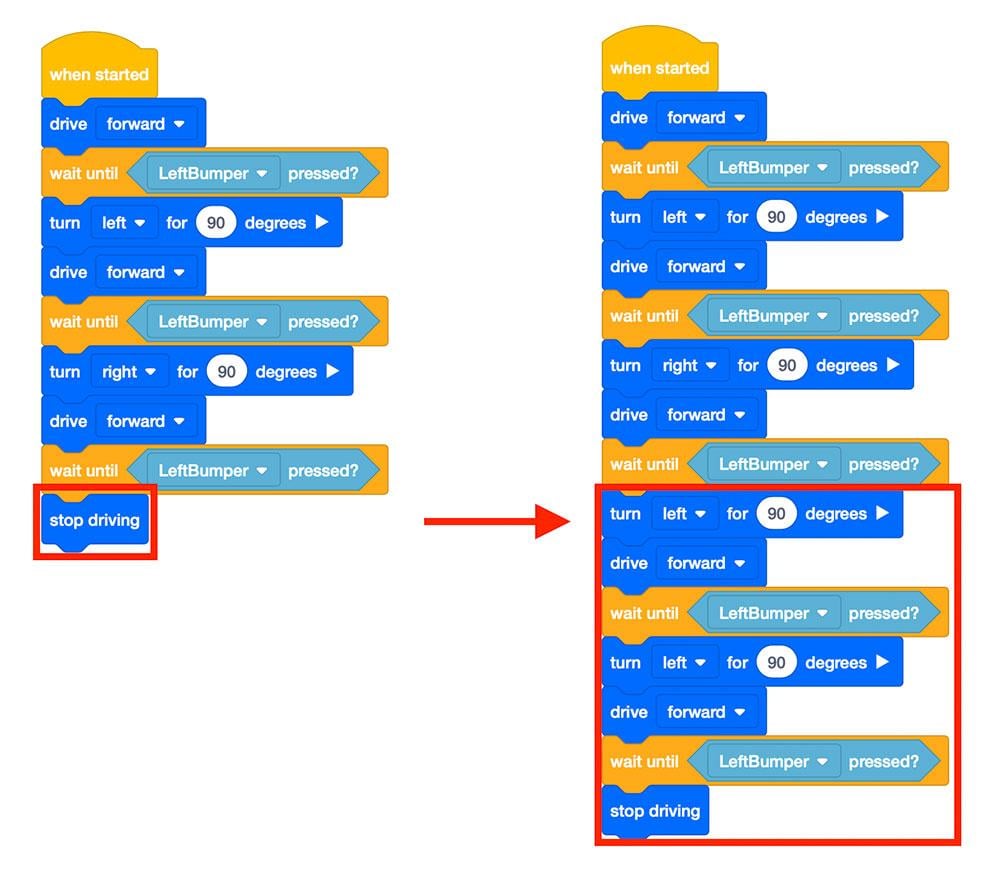
Edite el código eliminando el bloque [Stop driving] y reemplazándolo con los siguientes comandos para llevar el robot VR al número ‘2’.
- Inicie el Wall Maze Playground si aún no está abierto y ejecute el proyecto.
-
¡Mira cómo el robot VR se dirige al número "2" en el laberinto de pared del patio de juegos!

- Seleccione el botón "Restablecer" para restablecer el patio de recreo y mover el robot VR de nuevo a la posición inicial.
Seleccione el botón Siguiente para continuar con el resto de esta lección.