
പാഠം 3: സമ്മർദ്ദം അനുഭവപ്പെടുന്നതുവരെ വാഹനമോടിക്കുക
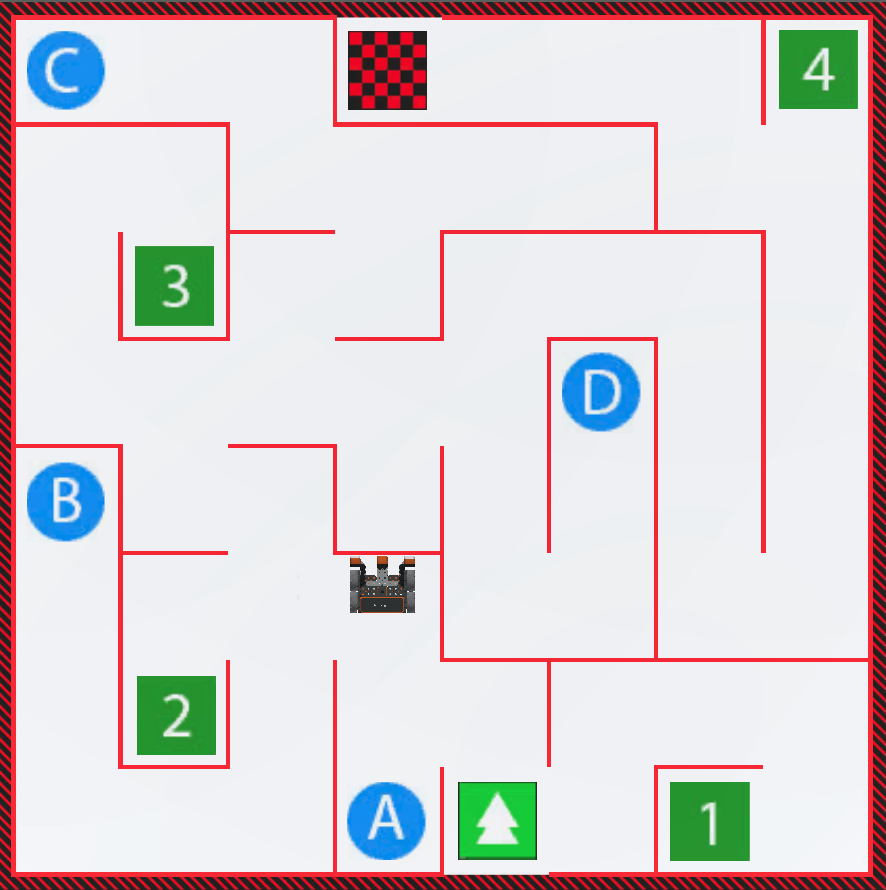
Wall Maze Playgroundലെ 'A' എന്ന അക്ഷരത്തിലേക്ക് VR റോബോട്ടിനെ നാവിഗേറ്റ് ചെയ്യുന്നതിനായി നിങ്ങൾ ഇപ്പോൾ ഒരു VEXcode VR പ്രോജക്റ്റ് സൃഷ്ടിച്ചിരിക്കുന്നു, കണ്ടീഷണലുകളും സെൻസർ മൂല്യങ്ങളും ഉപയോഗിച്ച് നിങ്ങളുടെ കഴിവുകൾ വികസിപ്പിക്കും. ഈ പാഠത്തിൽ, നിങ്ങൾ VR റോബോട്ടിനെ Wall Maze Playgroundലെ '2' എന്ന നമ്പറിലേക്ക് നാവിഗേറ്റ് ചെയ്യും, തുടർന്ന് 'B' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യാൻ അധിക ബ്ലോക്കുകൾ ആവശ്യമായി വരുന്നത് എന്തുകൊണ്ടാണെന്ന് പര്യവേക്ഷണം ചെയ്യും. മിനി-ചലഞ്ചിൽ, വാൾ മേസിന്റെ തുടക്കം മുതൽ '3' എന്ന നമ്പറിലേക്ക് നാവിഗേറ്റ് ചെയ്യാൻ നിങ്ങൾ ഈ കഴിവുകൾ പ്രയോഗിക്കും.
പഠന ഫലങ്ങൾ
- ഒരു അവസ്ഥ എപ്പോഴും ഒരു TRUE അല്ലെങ്കിൽ FALSE മൂല്യം റിപ്പോർട്ട് ചെയ്യുന്നുവെന്ന് തിരിച്ചറിയുക.
- ബമ്പർ സെൻസർ അമർത്തുന്നതുവരെ ഒരു VR റോബോട്ട് ഡ്രൈവ് മുന്നോട്ട് പോകുന്ന ഒരു പ്രോജക്റ്റിലെ പ്രോഗ്രാം ഫ്ലോ വിവരിക്കുക.
- പദ്ധതികളിൽ വ്യവസ്ഥകൾ ഉപയോഗിക്കുന്നത് എന്തുകൊണ്ടാണെന്ന് വിവരിക്കുക.
- പ്രോഗ്രാം എക്സിക്യൂഷൻ ഹൈലൈറ്റ് ചെയ്യുന്നതിന് സ്റ്റെപ്പ് ഫീച്ചർ എങ്ങനെ ഉപയോഗിക്കാമെന്ന് തിരിച്ചറിയുക.
- ഒരു പ്രോജക്റ്റിന്റെ ട്രബിൾഷൂട്ടിംഗിനും ഫ്ലോ ട്രാക്ക് ചെയ്യുന്നതിനും സ്റ്റെപ്പ് ഫീച്ചർ ഉപയോഗിക്കുന്നത് സഹായകരമാകുന്നത് എന്തുകൊണ്ടെന്ന് വിശദീകരിക്കുക.
പ്രോജക്റ്റിന്റെ പേര് മാറ്റുക
- മുൻ പാഠത്തിലെ പ്രോജക്റ്റ് ലോഡ് ചെയ്തിട്ടില്ലെങ്കിൽ, Unit4Lesson2 പ്രോജക്റ്റ് ലോഡ് ചെയ്യുക.
- പ്രോജക്റ്റിന്റെ പേര് Unit4Lesson3എന്ന് മാറ്റുക.

'A' എന്ന അക്ഷരത്തിലേക്ക് പദ്ധതിയുടെ ഒഴുക്ക്
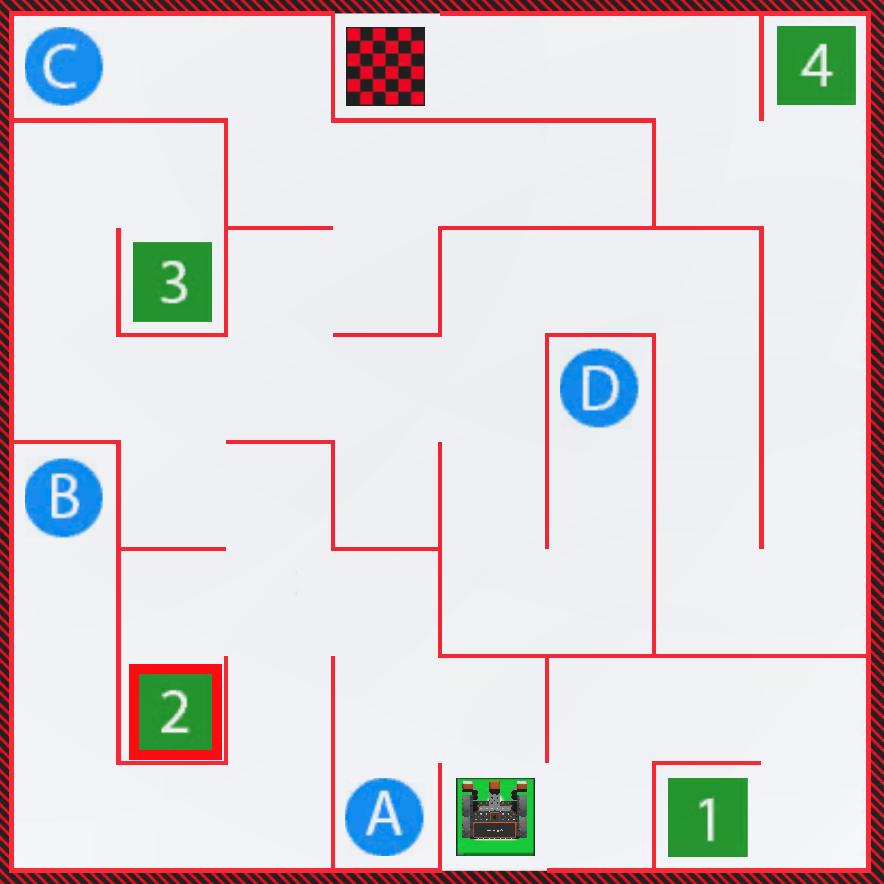
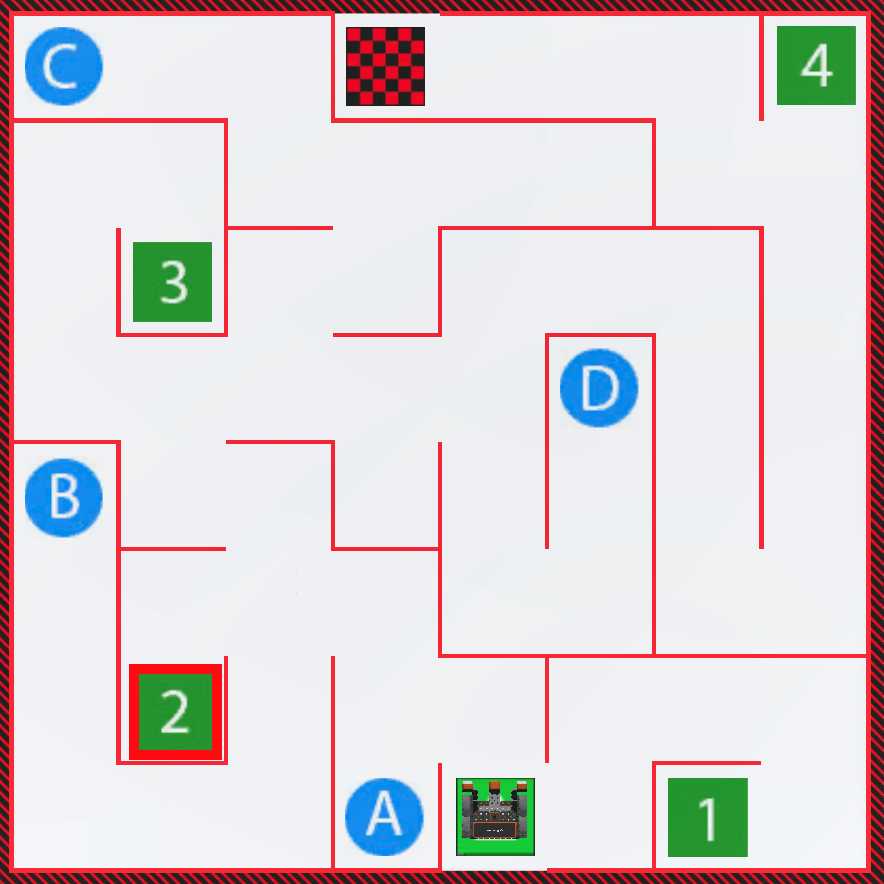
മുൻ പാഠത്തിൽ, VR റോബോട്ട് Wall Maze Playgroundലെ 'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്തു.

-
Wall Maze Playgroundലെ 'A' എന്ന അക്ഷരത്തിലേക്ക് ഡ്രൈവ് ചെയ്യുന്നതിനുള്ള പ്രോജക്റ്റ് ഫ്ലോ നന്നായി മനസ്സിലാക്കാൻ, നിങ്ങളുടെ മുൻ പ്രോജക്റ്റ് പരിഷ്കരിച്ചുകൊണ്ട് ആരംഭിക്കുക അല്ലെങ്കിൽ ഈ അടിസ്ഥാന പ്രോജക്റ്റുമായി പൊരുത്തപ്പെടുന്നതിന് ഒരു പുതിയ പ്രോജക്റ്റ് സൃഷ്ടിക്കുക.
ഒരു പ്രോജക്റ്റ് [വരെ കാത്തിരിക്കുക] ബ്ലോക്ക് ഉപയോഗിക്കുമ്പോൾ, പ്രോജക്റ്റിന്റെ പ്രോഗ്രാം ഫ്ലോ ഇപ്പോഴും മുകളിൽ നിന്ന് താഴേക്ക് അതേ ക്രമം പിന്തുടരുന്നു. [Wait until] ബ്ലോക്ക്, [Wait until] എന്നതിനുള്ളിലെ അവസ്ഥ പാലിക്കുന്നതുവരെ (TRUE എന്ന് റിപ്പോർട്ട് ചെയ്യുന്നു) ഒരു നിശ്ചിത ഘട്ടത്തിൽ പ്രോഗ്രാം ഫ്ലോ "താൽക്കാലികമായി നിർത്താൻ" അനുവദിക്കുന്നു.
[Wait until] ബ്ലോക്കുകൾ പോലുള്ള ബ്ലോക്കുകൾക്കുള്ളിലെ അവസ്ഥകൾ, ഉപയോക്താവിന് പ്രോഗ്രാം ഫ്ലോ "നിയന്ത്രിക്കാൻ" അനുവദിക്കുന്നു. ഉദാഹരണത്തിന്, [Wait until] ബ്ലോക്കിൽ, പ്രോഗ്രാം ഫ്ലോ താൽക്കാലികമായി നിർത്തി, അടുത്ത ബ്ലോക്കിലേക്ക് പോകുന്നതിന് മുമ്പ്, വ്യവസ്ഥ പാലിക്കപ്പെടുന്നതുവരെ "കാത്തിരിക്കുക", തുടർന്ന് TRUE എന്ന് റിപ്പോർട്ട് ചെയ്യും.
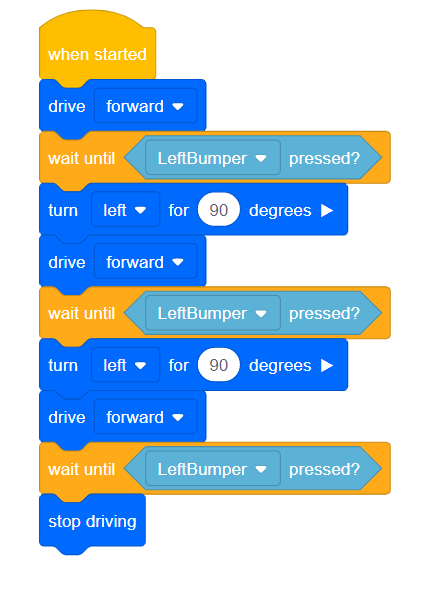
'A' എന്ന അക്ഷരത്തിലേക്ക് VR റോബോട്ടിനെ നയിക്കുന്നതിനുള്ള ഈ കോഡിൽ, ഇടത് ബമ്പർ അമർത്തുന്നതിന്റെ അവസ്ഥ TRUE ആകുന്നതുവരെ VR റോബോട്ട് മുന്നോട്ട് നീങ്ങും. ഈ ഉദാഹരണത്തിൽ ഇടത് ബമ്പർ അമർത്തുന്നത് പോലുള്ള ഒരു അവസ്ഥ, എല്ലായ്പ്പോഴും ഒരു TRUE അല്ലെങ്കിൽ FALSE മൂല്യം റിപ്പോർട്ട് ചെയ്യുന്നു.

നിങ്ങളുടെ അറിവിലേക്കായി
പ്രോജക്റ്റിനുള്ളിൽ കമാൻഡുകൾ എക്സിക്യൂട്ട് ചെയ്യപ്പെടുന്നതിന്റെ ഒരു ദൃശ്യ പ്രാതിനിധ്യം പ്രോജക്റ്റ് സ്റ്റെപ്പിംഗ് ഫീച്ചർ നിങ്ങൾക്ക് നൽകുന്നു. ഒരു VEXcode VR പ്രോജക്റ്റ് ട്രബിൾഷൂട്ട് ചെയ്യാനോ രൂപകൽപ്പന ചെയ്യാനോ ശ്രമിക്കുമ്പോൾ ഇത് നിങ്ങൾക്ക് പ്രധാനപ്പെട്ട ദൃശ്യ സൂചനകൾ നൽകും.

'2' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുക
ഈ പാഠത്തിൽ, VR റോബോട്ട് Wall Maze Playgroundൽ '2' എന്ന നമ്പറിലേക്ക് ഡ്രൈവ് ചെയ്യുന്ന തരത്തിൽ പ്രോജക്റ്റ് എഡിറ്റ് ചെയ്യും!
-
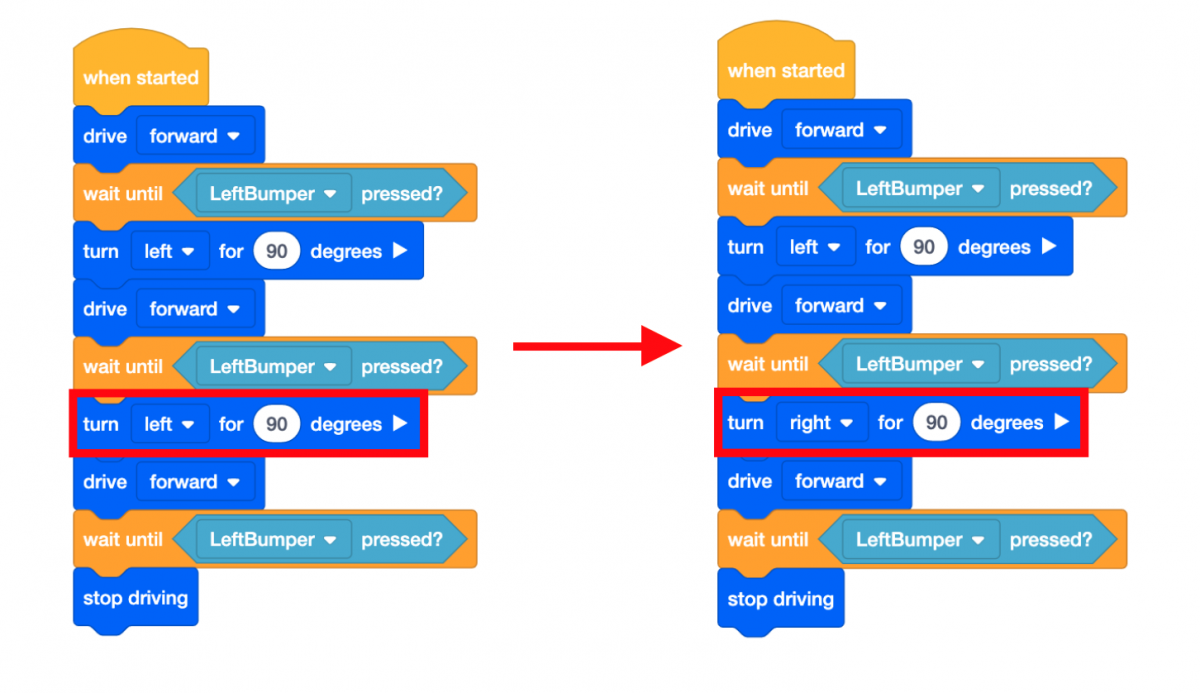
രണ്ടാം പാഠത്തിലെ പ്രോജക്റ്റിൽ VR റോബോട്ട് ഇടത്തേക്ക് തിരിഞ്ഞ് 'A' എന്ന അക്ഷരത്തിലേക്ക് പോകുന്നതായി കാണാം. '2' എന്ന നമ്പറിലേക്ക് നാവിഗേറ്റ് ചെയ്യുന്നതിന്, VR റോബോട്ട് പകരം വലത്തേക്ക് തിരിയണം, മുന്നോട്ട് ഡ്രൈവ് ചെയ്യണം, തുടർന്ന് ഇടത്തേക്ക് തിരിയണം.
-
രണ്ടാമത്തെ [ടേൺ ഫോർ] ബ്ലോക്കിന്റെ ദിശ ഇടത്തേക്ക് മാറ്റുന്നതിന് പകരം വലത്തേക്ക് മാറ്റുക.
- Wall Maze Playground തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
VR റോബോട്ട് '2' എന്ന നമ്പറിലേക്ക് ഓടിക്കാൻ തുടങ്ങുന്നത് കാണുക, പക്ഷേ ഒരു ചുവരിൽ നിർത്തുക. അതിനാൽ, ചുമരിൽ അമർത്തിയാൽ വിആർ റോബോട്ട് നിർത്തുന്നതിന് പകരം ഇടത്തേക്ക് തിരിയേണ്ടതുണ്ട്.
-
പ്ലേഗ്രൗണ്ട് പുനഃസജ്ജമാക്കാൻ "റീസെറ്റ്" ബട്ടൺ തിരഞ്ഞെടുത്ത് VR റോബോട്ടിനെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ നീക്കുക.

-
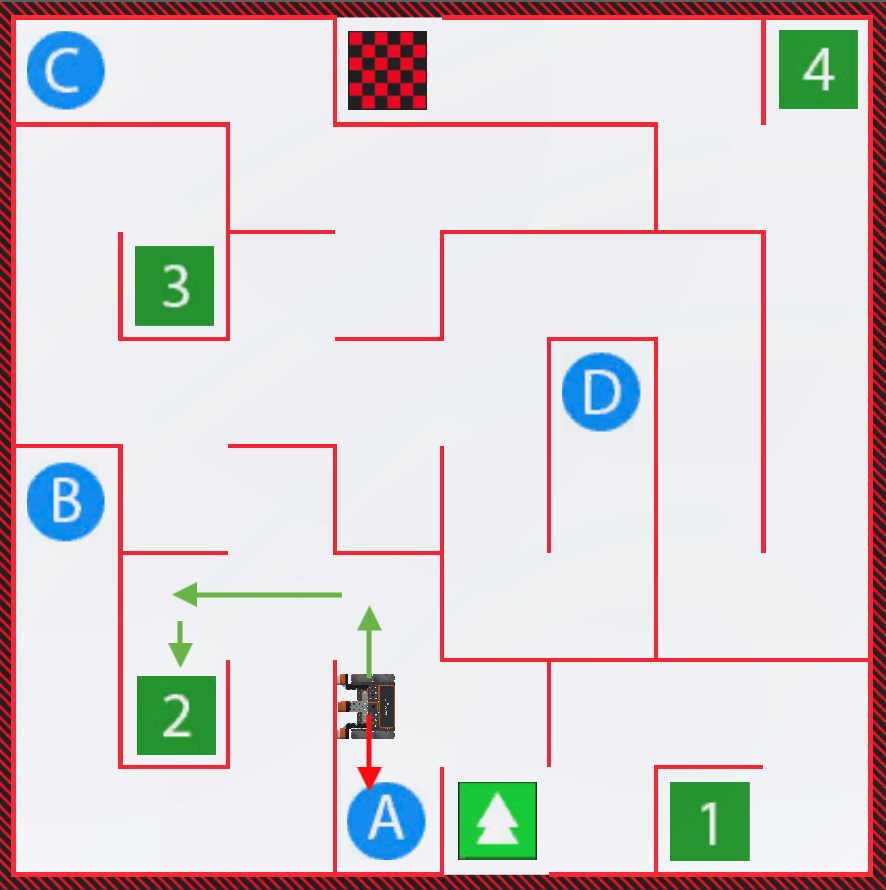
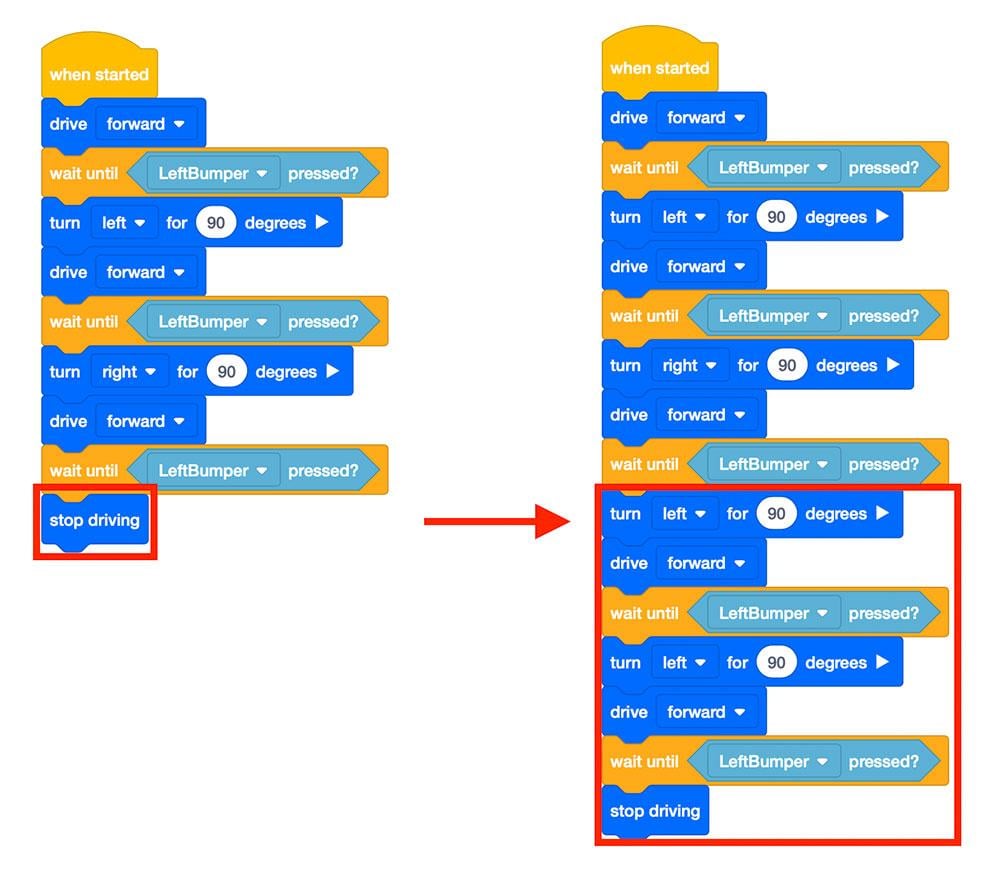
VR റോബോട്ടിനെ '2' എന്ന നമ്പറിലേക്ക് നയിക്കുന്നതിന് [സ്റ്റോപ്പ് ഡ്രൈവിംഗ്] ബ്ലോക്ക് നീക്കം ചെയ്ത് താഴെ പറയുന്ന കമാൻഡുകൾ ഉപയോഗിച്ച് കോഡ് എഡിറ്റ് ചെയ്യുക.
- Wall Maze Playground തുറന്നിട്ടില്ലെങ്കിൽ അത് സമാരംഭിച്ച് പ്രോജക്റ്റ് പ്രവർത്തിപ്പിക്കുക.
-
വാൾ മെയ്സ് പ്ലേഗ്രൗണ്ട്ൽ '2' എന്ന നമ്പറിലേക്ക് VR റോബോട്ട് ഡ്രൈവ് ചെയ്യുന്നത് കാണുക!

- പ്ലേഗ്രൗണ്ട് പുനഃസജ്ജമാക്കാൻ "റീസെറ്റ്" ബട്ടൺ തിരഞ്ഞെടുത്ത് VR റോബോട്ടിനെ ആരംഭ സ്ഥാനത്തേക്ക് തിരികെ നീക്കുക.
ഈ പാഠത്തിന്റെ ബാക്കി ഭാഗം തുടരാൻ അടുത്തത് ബട്ടൺ തിരഞ്ഞെടുക്കുക.