
Bài 3: Lái xe cho đến khi bị ép
Bây giờ bạn đã tạo một dự án VEXcode VR để điều hướng Robot VR đến chữ 'A' trên Mê cung tường Sân chơi, bạn sẽ mở rộng kỹ năng của mình bằng cách sử dụng các điều kiện và giá trị cảm biến. Trong Bài học này, bạn sẽ điều khiển Robot VR đến số '2' trong Mê cung tường Sân chơi, sau đó khám phá lý do tại sao cần thêm khối để lái đến chữ 'B'. Trong thử thách nhỏ này, bạn sẽ áp dụng những kỹ năng này để di chuyển từ đầu Mê cung tường đến số '3'.
Kết quả học tập
- Xác định rằng một điều kiện luôn báo cáo giá trị ĐÚNG hoặc SAI.
- Mô tả luồng chương trình trong một dự án có Robot VR di chuyển về phía trước cho đến khi Cảm biến cản được nhấn.
- Mô tả lý do tại sao các điều kiện được sử dụng trong các dự án.
- Xác định cách sử dụng tính năng Bước để làm nổi bật việc thực thi chương trình.
- Giải thích lý do tại sao việc sử dụng tính năng Bước lại hữu ích trong việc khắc phục sự cố và theo dõi tiến trình của một dự án.
Đổi tên dự án
- Nếu dự án của Bài học trước chưa được tải, hãy tải dự án Unit4Lesson2.
- Đổi tên dự án thành Unit4Lesson3.

Luồng của Dự án hướng đến chữ 'A'
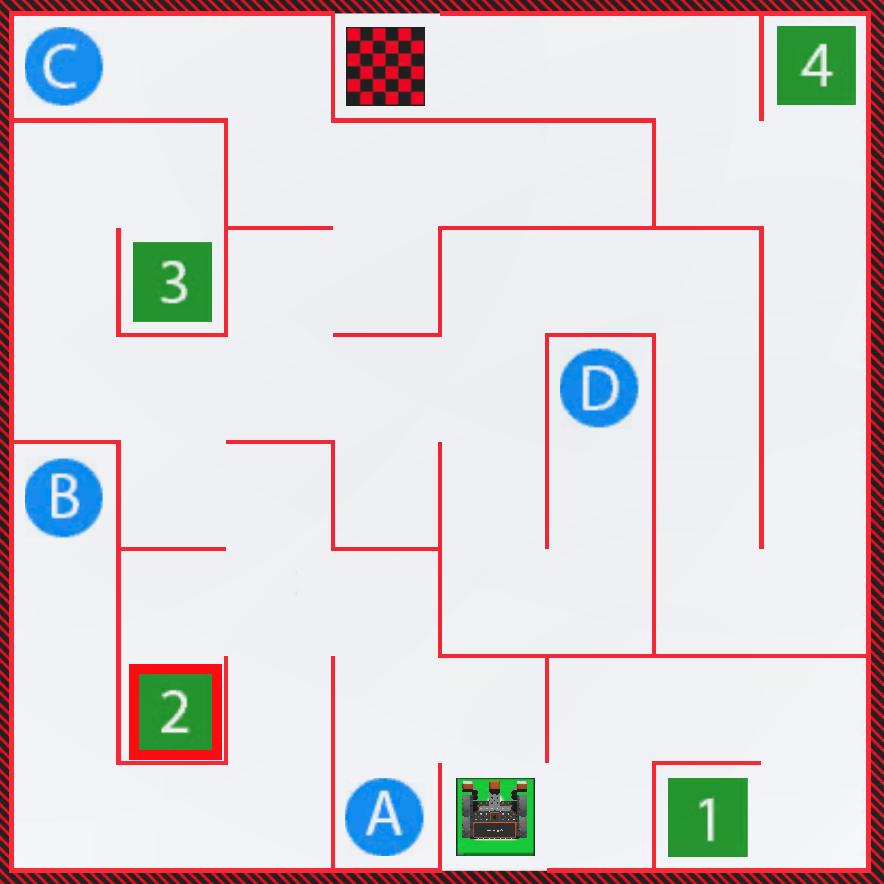
Trong bài học trước, Robot VR đã lái xe đến chữ 'A' trên Mê cung tường Sân chơi.

-
Để hiểu rõ hơn về quy trình dự án lái xe đến chữ 'A' trên Mê cung tường Sân chơi, hãy bắt đầu bằng cách sửa đổi dự án trước đó của bạn hoặc tạo một dự án mới phù hợp với dự án cơ sở này.
Khi một dự án sử dụng khối [Chờ cho đến], luồng chương trình của dự án vẫn tuân theo trình tự từ trên xuống dưới. Khối [Chờ cho đến] cho phép luồng chương trình "tạm dừng" tại một thời điểm nhất định, cho đến khi điều kiện bên trong khối [Chờ cho đến] được đáp ứng (báo cáo là ĐÚNG).
Các điều kiện bên trong khối, chẳng hạn như khối [Chờ cho đến khi], cho phép người dùng "kiểm soát" luồng chương trình. Ví dụ, với khối [Chờ cho đến khi], luồng chương trình sẽ tạm dừng và "chờ cho đến khi" điều kiện được đáp ứng và báo cáo là ĐÚNG trước khi chuyển sang khối tiếp theo.
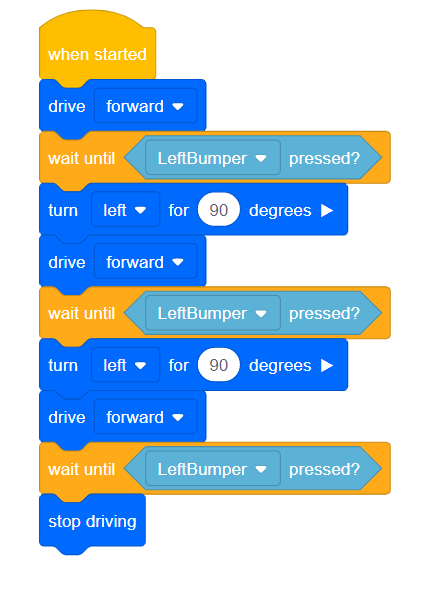
Trong đoạn mã này để điều khiển Robot VR đến chữ 'A', Robot VR sẽ tiến về phía trước cho đến khi điều kiện của thanh cản bên trái được nhấn là ĐÚNG. Một điều kiện, chẳng hạn như nhấn Left Bumper trong ví dụ này, luôn báo cáo giá trị ĐÚNG hoặc SAI.

Để bạn biết
Tính năng Project Stepping cung cấp cho bạn hình ảnh trực quan về luồng lệnh khi chúng được thực thi trong một dự án. Điều này có thể cung cấp cho bạn những tín hiệu trực quan quan trọng khi bạn đang cố gắng khắc phục sự cố hoặc thiết kế một dự án VEXcode VR.

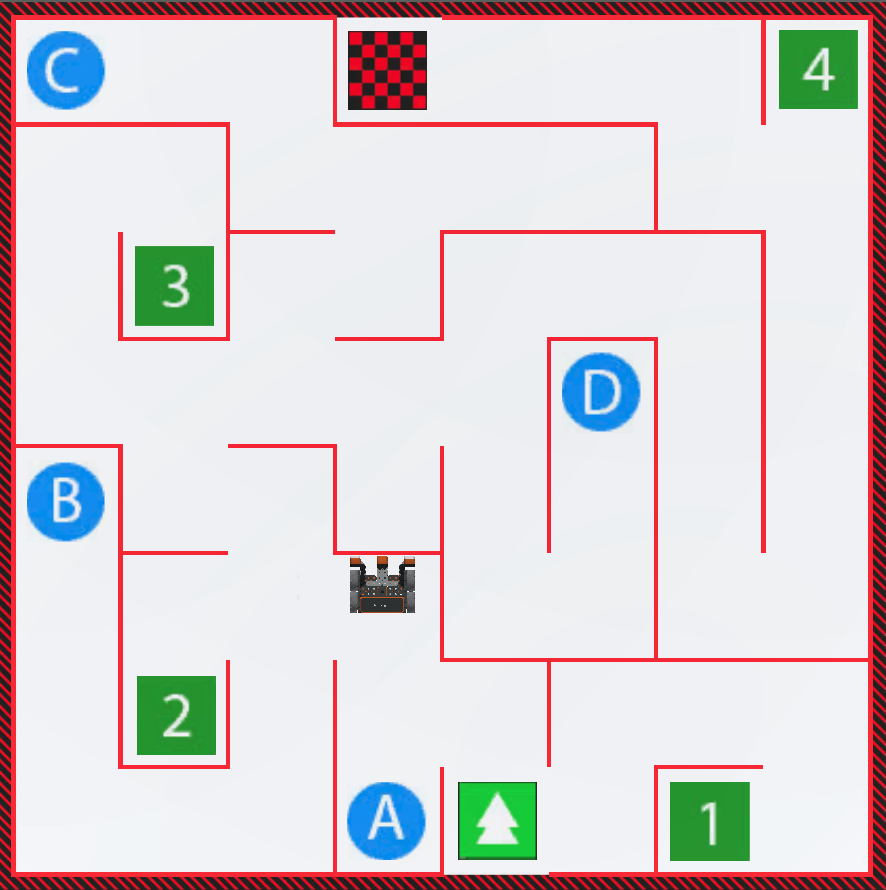
Lái xe đến số '2'
Trong Bài học này, dự án sẽ được chỉnh sửa để Robot VR di chuyển đến số '2' trên Mê cung tường Sân chơi!
-
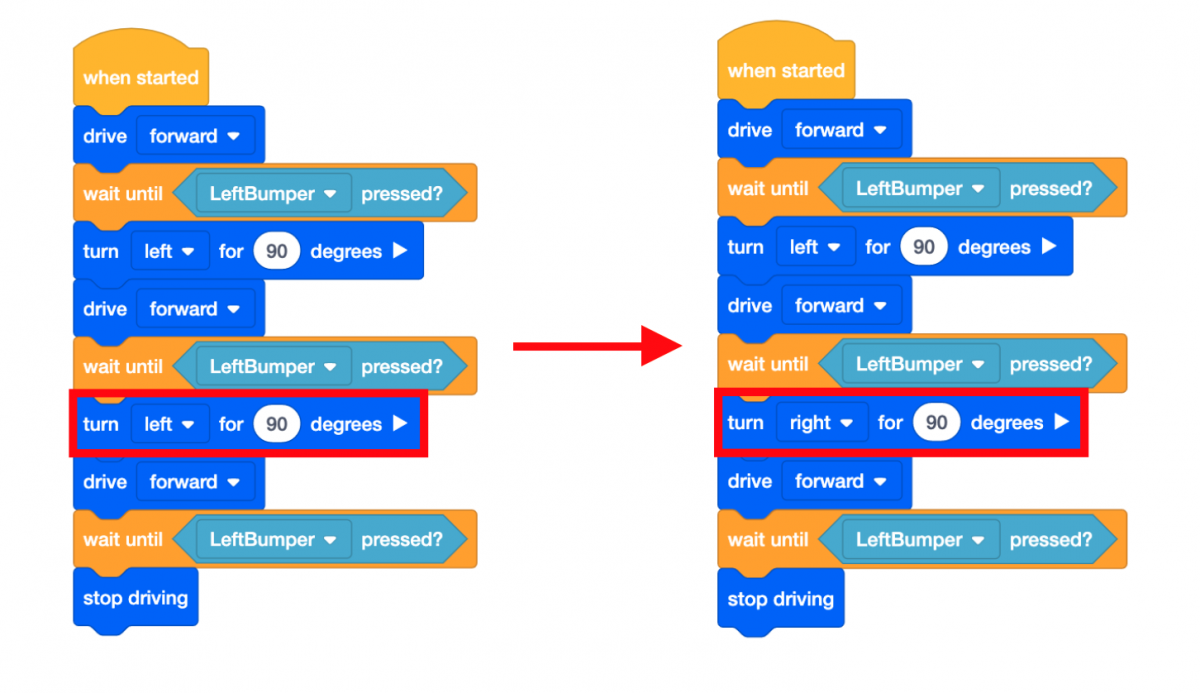
Dự án ở Bài 2 yêu cầu Robot VR rẽ trái để lái đến chữ 'A'. Để điều hướng đến số '2', Robot VR sẽ phải rẽ phải, tiến về phía trước rồi rẽ trái.
-
Thay đổi hướng của khối [Quay để] thứ hai sang phải thay vì sang trái.
- Khởi chạy Wall Maze Playground nếu nó chưa mở và chạy dự án.
-
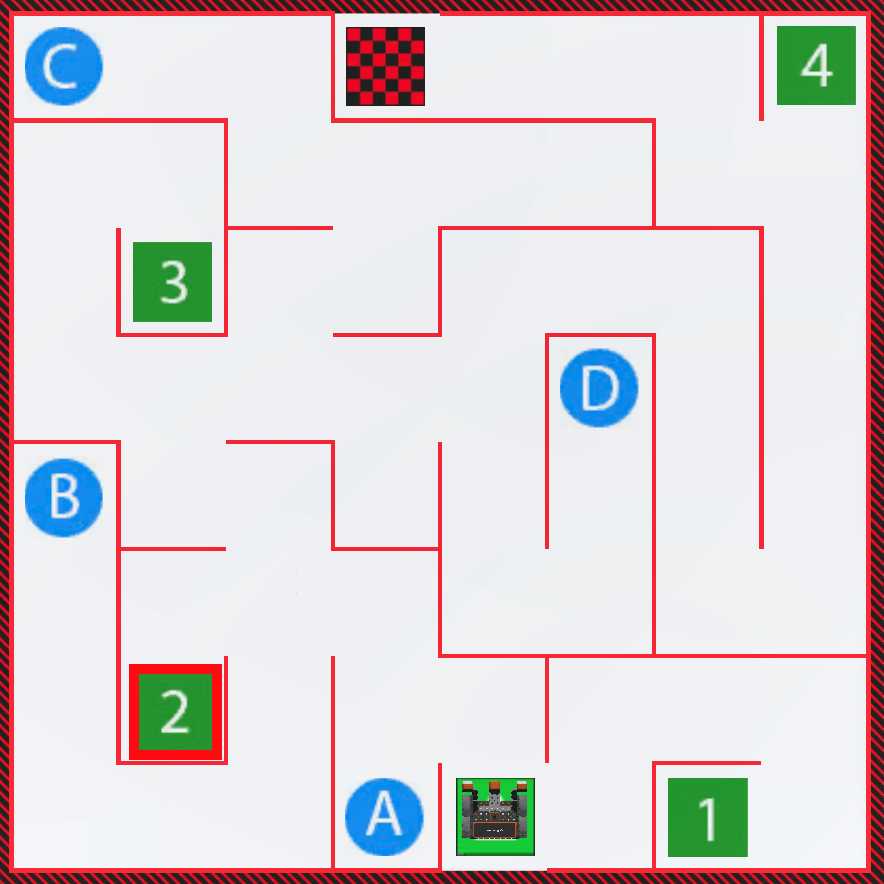
Hãy xem Robot VR bắt đầu di chuyển đến số '2' nhưng dừng lại ở bức tường. Vì vậy, VR Robot cần rẽ trái khi chạm vào tường thay vì dừng lại.
-
Chọn nút “Đặt lại” để đặt lại Sân chơi và di chuyển Robot VR trở lại vị trí ban đầu.

-
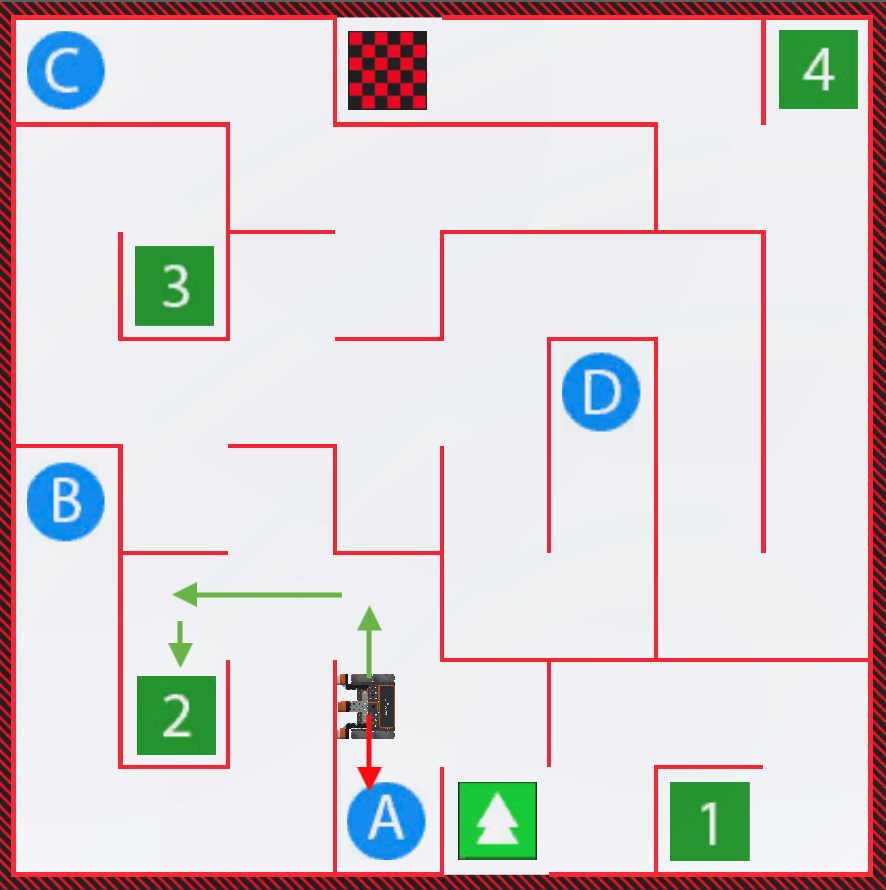
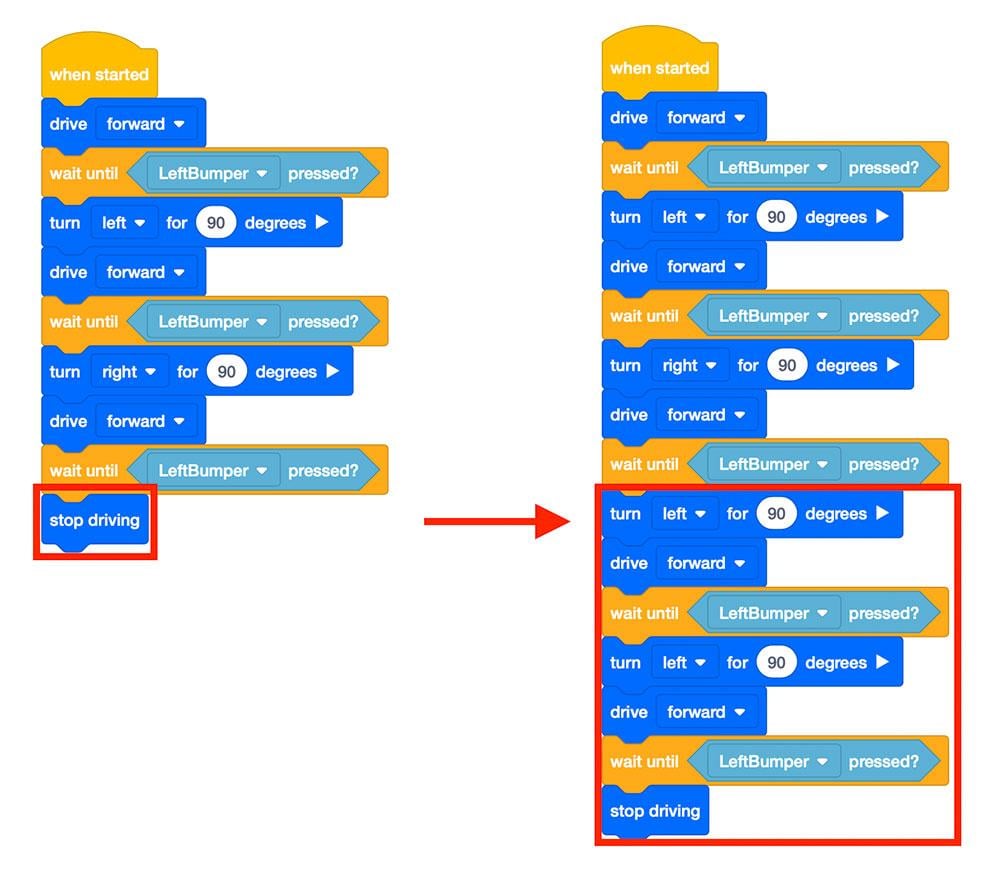
Chỉnh sửa mã bằng cách xóa khối [Dừng lái xe] và thay thế bằng các lệnh sau để điều khiển Robot VR đến số '2'.
- Khởi chạy Wall Maze Playground nếu nó chưa mở và chạy dự án.
-
Hãy xem Robot VR lái đến số '2' trên Sân chơi Mê cung Tường !

- Chọn nút “Đặt lại” để đặt lại Sân chơi và di chuyển Robot VR trở lại vị trí ban đầu.
Chọn nút Tiếp theo để tiếp tục phần còn lại của Bài học này.