
บทเรียนที่ 3: ขับรถจนถูกกดดัน
ตอนนี้คุณได้สร้างโครงการ VEXcode VR เพื่อนำทางหุ่นยนต์ VR ไปยังตัวอักษร ‘A’ บน Wall Maze Playgroundคุณจะขยายทักษะของคุณโดยใช้เงื่อนไขและค่าเซ็นเซอร์ ในบทเรียนนี้คุณจะนำทางหุ่นยนต์ VR ไปยังหมายเลข ‘2‘ ใน Wall Maze Playground จากนั้นสำรวจว่าเหตุใดจึงต้องมีบล็อกเพิ่มเติมเพื่อขับไปยังตัวอักษร ‘B’ ในการประลองมินิคุณจะใช้ทักษะเหล่านี้เพื่อนำทางจากจุดเริ่มต้นของเขาวงกตกำแพงไปยังหมายเลข ‘3’
ผลการเรียนรู้
- ระบุว่าเงื่อนไขรายงานค่าที่เป็นจริงหรือเท็จเสมอ
- อธิบายขั้นตอนของโปรแกรมในโครงการที่มี VR Robot ขับไปข้างหน้าจนกว่าจะมีการกด Bumper Sensor
- อธิบายเหตุผลที่ใช้เงื่อนไขในโครงการ
- ระบุวิธีการใช้คุณลักษณะขั้นตอนเพื่อเน้นการดำเนินการของโปรแกรม
- อธิบายว่าเหตุใดการใช้ฟีเจอร์ขั้นตอนจึงมีประโยชน์ในการแก้ไขปัญหาและติดตามลำดับงานของโครงการ
เปลี่ยนชื่อโปรเจกต์
- หากยังไม่ได้โหลดโครงการของบทเรียนก่อนหน้าให้โหล ด โครงการ Unit4Lesson2
- เปลี่ยนชื่อ โครงการUnit4Lesson3

การไหลของโครงการเพื่อไปยังตัวอักษร ‘A’
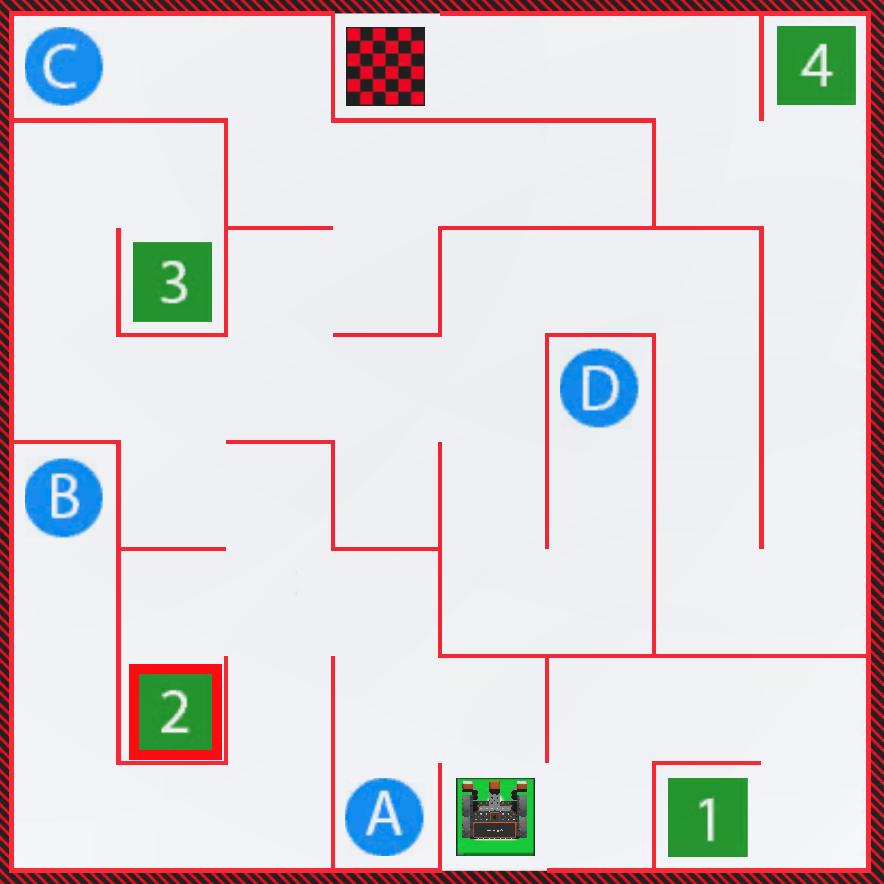
ในบทเรียนก่อนหน้านี้หุ่นยนต์ VR ขับไปที่ตัวอักษร ‘A’ บน Wall Maze Playground

-
เพื่อให้เข้าใจถึงขั้นตอนของโครงการในการขับรถไปยังตัวอักษร ‘A’ บน Wall Maze Playground ได้ดียิ่งขึ้นให้เริ่มต้นด้วยการปรับเปลี่ยนโครงการก่อนหน้าของคุณหรือสร้างโครงการใหม่เพื่อให้ตรงกับโครงการพื้นฐานนี้
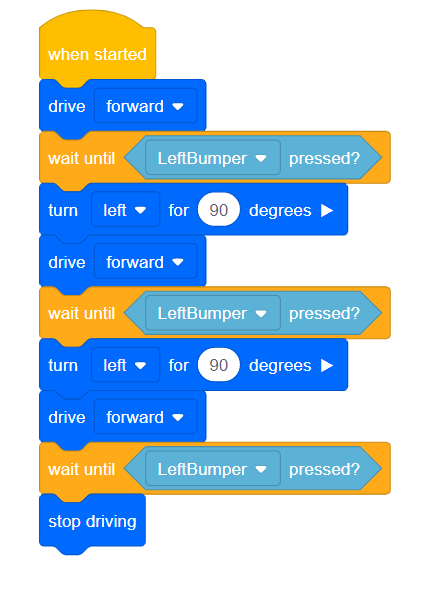
เมื่อโครงการใช้บล็อก [รอจนกว่า] โฟลว์โปรแกรมของโครงการจะยังคงเป็นไปตามลำดับจากบนลงล่างเหมือนเดิม บล็อก [รอจนกว่า] ช่วยให้ขั้นตอนของโปรแกรม "หยุดชั่วคราว" ที่จุดใดจุดหนึ่งจนกว่าจะเป็นไปตามเงื่อนไขภายใน [รอจนกว่า] (รายงานเป็นจริง)
เงื่อนไขภายในบล็อกเช่น [รอจนกว่า] บล็อกช่วยให้ผู้ใช้สามารถ "ควบคุม" การไหลของโปรแกรมได้ ตัวอย่างเช่นด้วยบล็อค [รอจนกว่า] โฟลว์ของโปรแกรมจะหยุดชั่วคราวและ "รอจนกว่า" เป็นไปตามเงื่อนไขและรายงานเป็นจริงก่อนที่จะไปยังบล็อคถัดไป
ในรหัสนี้สำหรับการขับเคลื่อนหุ่นยนต์ VR ไปยังตัวอักษร ‘A' หุ่นยนต์ VR จะขับเคลื่อนไปข้างหน้าจนกว่าสภาพของกันชนซ้ายจะถูกกดเป็นจริง เงื่อนไขเช่นกันชนซ้ายที่ถูกกดในตัวอย่างนี้จะรายงานค่าที่เป็นจริงหรือเท็จเสมอ

สำหรับข้อมูลของคุณ
คุณลักษณะ Project Stepping ช่วยให้คุณเห็นภาพการไหลของคำสั่งในขณะที่กำลังดำเนินการภายในโครงการ สิ่งนี้สามารถให้สัญญาณภาพที่สำคัญแก่คุณเมื่อคุณพยายามแก้ไขปัญหาหรือออกแบบโครงการ VEXcode VR

ขับไปที่หมายเลข '2'
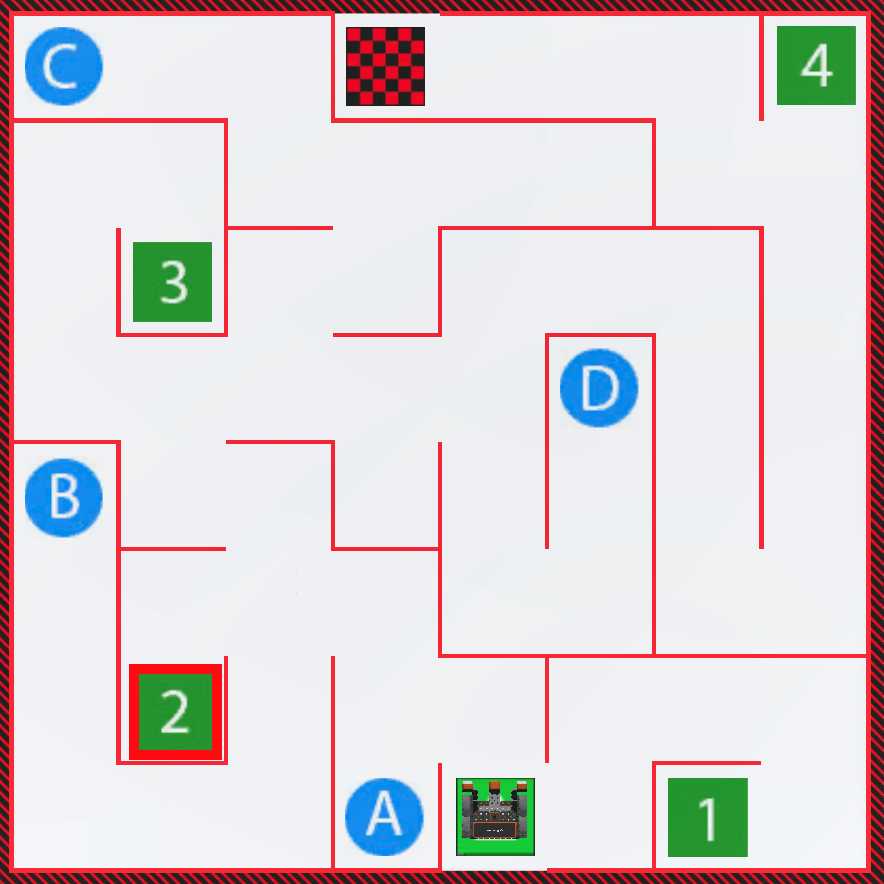
ในบทเรียนนี้โครงการจะได้รับการแก้ไขเพื่อให้ VR Robot ขับไปยังหมายเลข ‘2’ บน Wall Maze Playground!
-
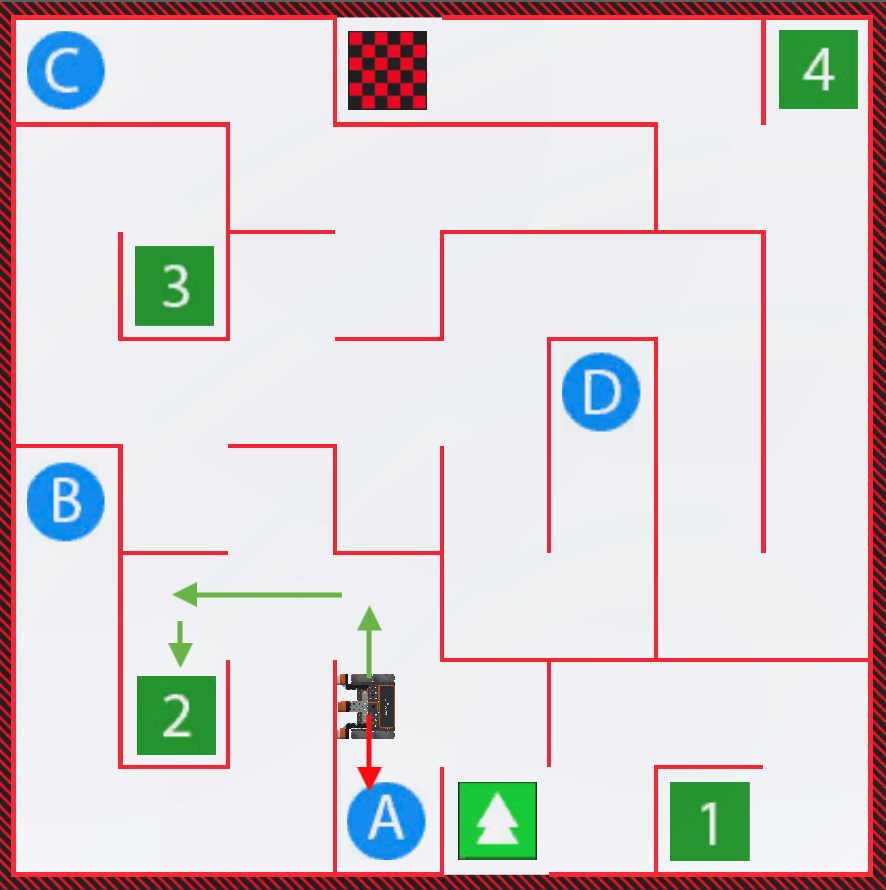
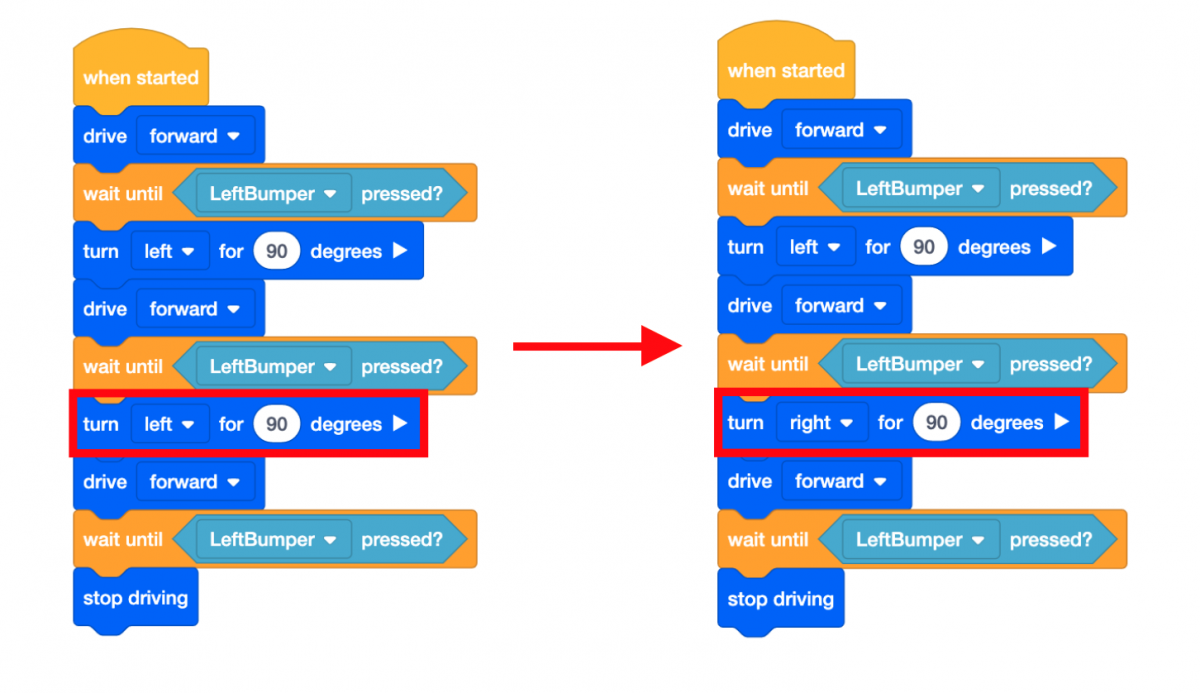
โครงการจากบทเรียนที่ 2 มีหุ่นยนต์ VR เลี้ยวซ้ายเพื่อขับไปยังตัวอักษร ‘A’ เพื่อไปยังหมายเลข ‘2‘ หุ่นยนต์ VR จะต้องเลี้ยวขวาแทนขับไปข้างหน้าแล้วเลี้ยวซ้าย
-
เปลี่ยนทิศทางของบล็อก [Turn for] อันที่สองไปทางขวาแทนทางซ้าย
- เปิด Wall Maze Playground หากยังไม่ได้เปิดและดำเนินโครงการ
-
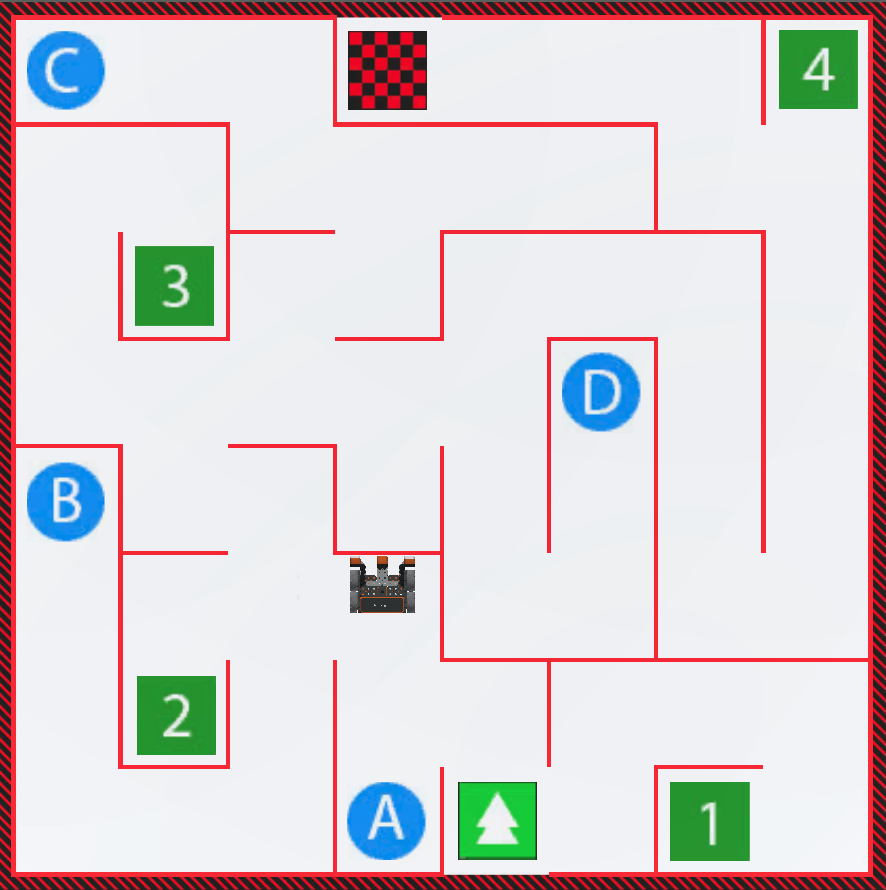
ดูหุ่นยนต์ VR เริ่มขับไปที่หมายเลข ‘2’ แต่หยุดที่กำแพง ดังนั้นหุ่นยนต์ VR จะต้องเลี้ยวซ้ายเมื่อมันกดกับผนังแทนที่จะหยุด
-
เลือกปุ่ม "รีเซ็ต" เพื่อรีเซ็ตสนามเด็กเล่นและย้ายหุ่นยนต์ VR กลับไปที่ตำแหน่งเริ่มต้น

-
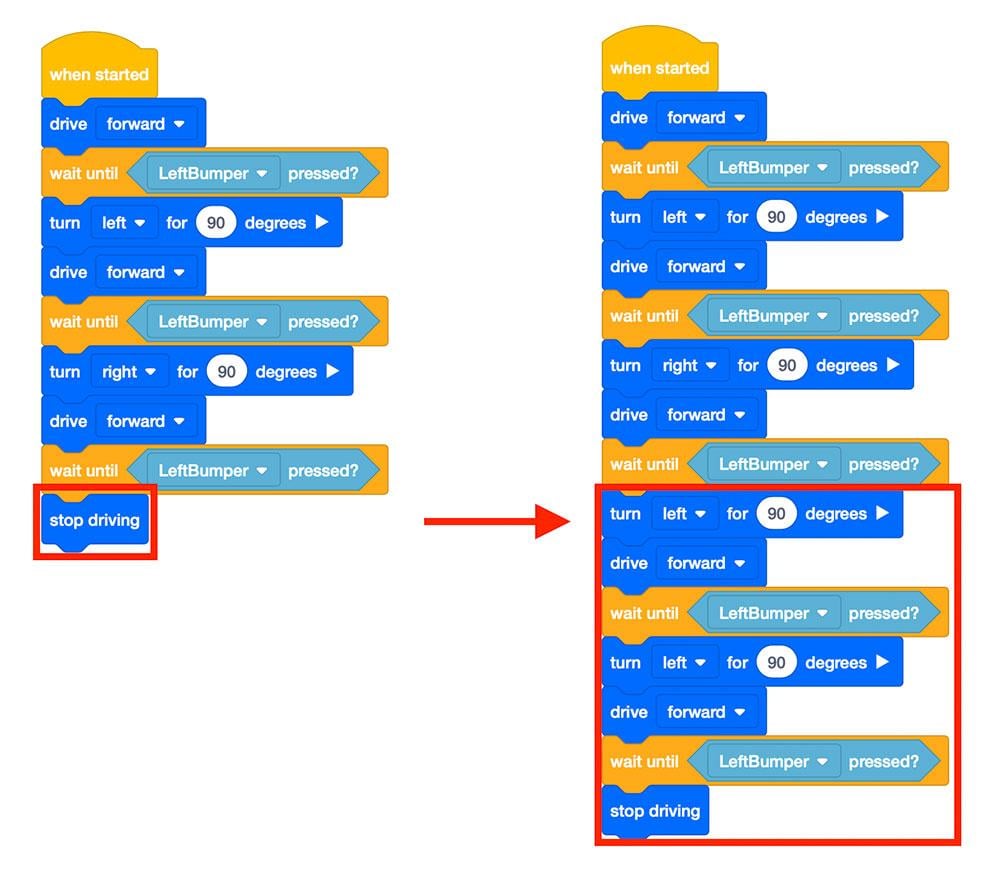
แก้ไขรหัสโดยลบบล็อก [หยุดขับ] และแทนที่ด้วยคำสั่งต่อไปนี้เพื่อขับหุ่นยนต์ VR ไปยังหมายเลข ‘2’
- เปิด Wall Maze Playground หากยังไม่ได้เปิดและดำเนินโครงการ
-
ดู VR Robot ขับไปที่หมายเลข ‘2’ บน Wall Maze Playground!

- เลือกปุ่ม "รีเซ็ต" เพื่อรีเซ็ตสนามเด็กเล่นและย้ายหุ่นยนต์ VR กลับไปที่ตำแหน่งเริ่มต้น
เลือกปุ่ม ถัดไป เพื่อดำเนินการกับบทเรียนส่วนที่เหลือนี้ต่อไป