
খেলা
পর্ব ১ - ধাপে ধাপে
- নির্দেশনাশিক্ষার্থীদের নির্দেশ দিন যে তারা VEXcode GO তে একটি প্রকল্প তৈরি করতে যাচ্ছে যাতে তারা কোড বেস চালাতে পারে এবং ইলেক্ট্রোম্যাগনেট দিয়ে একটি মঙ্গল গ্রহের শিলা নমুনা (লাল ডিস্ক) সংগ্রহ করতে পারে, তারপর এটি 'মঙ্গল ভূমি' (শুরু বিন্দু) এ ফিরিয়ে দিতে পারে।
-
শিক্ষার্থীরা তোমার সাথে এই প্রকল্পটি তৈরি করবে এবং তারপর মঙ্গল গ্রহের পৃষ্ঠে (ক্ষেত্র) এটি পরীক্ষা করবে। নিচের অ্যানিমেশনটি দেখায় যে এই প্রকল্পটি শুরু হলে কোড বেস কীভাবে স্থানান্তরিত হবে। রোবটটি রেড ডিস্কে পৌঁছানো পর্যন্ত এগিয়ে যায়, তারপর এটি তার ইলেক্ট্রোম্যাগনেটকে শক্তি দিয়ে এটি তুলে নেয় এবং ঘুরে ফিরে তার শুরুর অবস্থানে ফিরে আসে।
ভিডিও ফাইল
-
- শিক্ষার্থীদের জন্য মডেল মডেল কীভাবে VEXcode GO-তে প্রকল্পটি তৈরি করতে হবে এবং ক্ষেত্রের উপর তাদের প্রকল্পগুলি পরীক্ষা করতে হবে ।
- VEXcode GO-তে কীভাবে তাদের কোড বেসে মস্তিষ্ককে তাদের ডিভাইসে সংযুক্ত করতে হয় তা দেখিয়ে শুরু করুন । কারণ ডিভাইসগুলির মধ্যে সংযোগের ধাপগুলি পরিবর্তিত হয়, আপনার কম্পিউটার বা ট্যাবলেটের সাথে VEX GO Brain সংযোগ করার জন্য নির্দিষ্ট পদক্ষেপের জন্য VEXcode GO VEX লাইব্রেরির সংযোগকারী নিবন্ধগুলি দেখুন ।
- তাদের কোড বেসের জন্য VEXCode GO কনফিগার করতে হবে । প্রয়োজনে, একটি কোড বেস ভেক্স লাইব্রেরি নিবন্ধ কনফিগার করুন এবং নিশ্চিত করুন যে শিক্ষার্থীরা টুলবক্সে ড্রাইভট্রেন ব্লক দেখতে পারে ।
-
তারপরে আপনার প্রকল্পটি একসাথে তৈরি করা শুরু করুন । প্রথমে, ওয়ার্কস্পেসে একটি [ড্রাইভ ফর] ব্লক টানুন এবং এটি {When started} ব্লকের সাথে সংযুক্ত করুন । দূরত্বের প্যারামিটারটি 400 মিমি এ পরিবর্তন করুন । এটি কোড বেসকে রেড ডিস্কের ঠিক আগের দিকে নিয়ে যাবে এটি সংগ্রহ করার জন্য ।
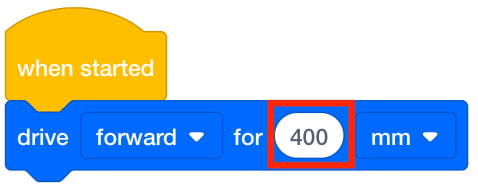 [এর জন্য ড্রাইভ]
[এর জন্য ড্রাইভ] যোগ করুন এবং দূরত্ব সেট করুন -
প্রকল্পে [Energize electromagnet] ব্লক যোগ করুন । এর ফলে ইলেক্ট্রোম্যাগনেট ডিস্কটি তুলে নেবে ।
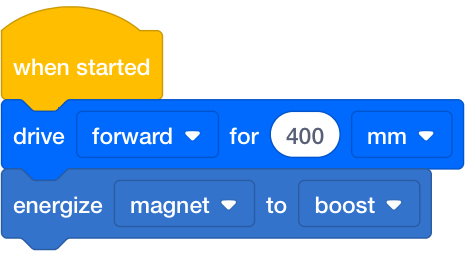 [Energize electromagnet]
[Energize electromagnet] যোগ করুন -
[টার্ন ফর] ব্লকটি যোগ করুন এবং 180 ডিগ্রিতে টার্ন মান সেট করুন যাতে কোড বেসটি মার্স বেসে ফিরে যাওয়ার জন্য ঘুরে যায় ।
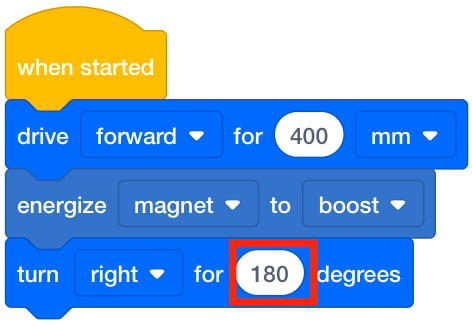 [টার্ন ফর]
[টার্ন ফর] যোগ করুন এবং 180 ডিগ্রিতে সেট করুন -
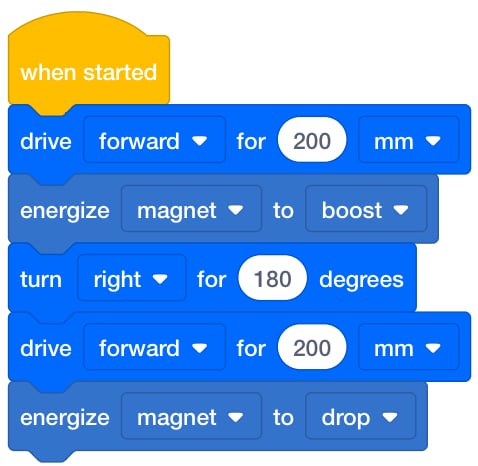
400 মিমি পর্যন্ত এগিয়ে যাওয়ার জন্য আরেকটি [Drive for] সেট যোগ করুন, এবং অন্য একটি [Energize electromagnet] ব্লক এবং এটি ‘ড্রপ‘ -এ সেট করুন । এর ফলে কোড বেস ডিস্কটিকে বেসে পৌঁছে দেবে । সম্পূর্ণ প্রকল্পটি নীচের চিত্রের সাথে মিল থাকা উচিত:
 চূড়ান্ত ব্লক
চূড়ান্ত ব্লক যোগ করুন এবং প্যারামিটার সেট করুন -
শিক্ষার্থীদের তাদের প্রকল্পের নাম জিও নমুনা 1 রাখুন এবং এটি তাদের ডিভাইসে সেভ করুন । একটি VEXcode GO প্রকল্প সংরক্ষণের জন্য ডিভাইস-নির্দিষ্ট পদক্ষেপের জন্য VEXcode GO VEX লাইব্রেরির খুলুন এবং সংরক্ষণ করুন বিভাগটি দেখুন ।

সম্পূর্ণ প্রকল্প - জিও নমুনা 1
শিক্ষার্থীদের জন্য মডেল তৈরি করুন কিভাবে মাঠে তাদের প্রকল্প পরীক্ষা করতে হয়।
-
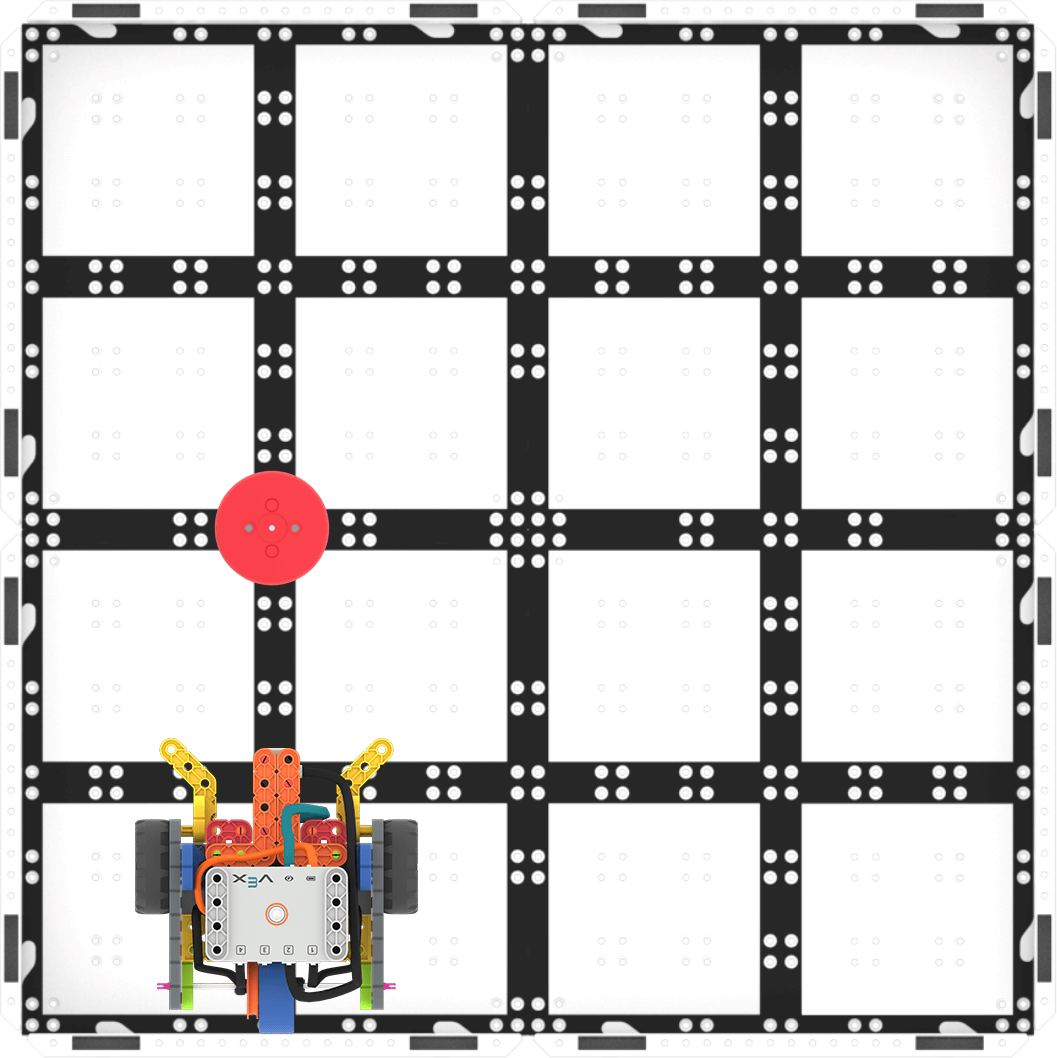
প্রথমে, তাদের দেখান যে কীভাবে তাদের রোবটটি প্রারম্ভিক বিন্দুতে (মার্স বেস) এবং রেড ডিস্কটি মাঠে স্থাপন করা যায় যেমনটি নীচের ছবিতে দেখানো হয়েছে । প্রান্তিককরণে সহায়তা করতে ক্ষেত্রের গ্রিড লাইনগুলি ব্যবহার করুন । ডিস্ক এবং ইলেক্ট্রোম্যাগনেট উভয়ই ক্ষেত্রের ছেদকারী গ্রিড লাইনের উপর রেখাযুক্ত করা যেতে পারে, যাতে শিক্ষার্থীরা তাদের প্রকল্পগুলি পরীক্ষা করার সময় সাফল্যের জন্য সেট আপ করা সহজ করে তোলে ।
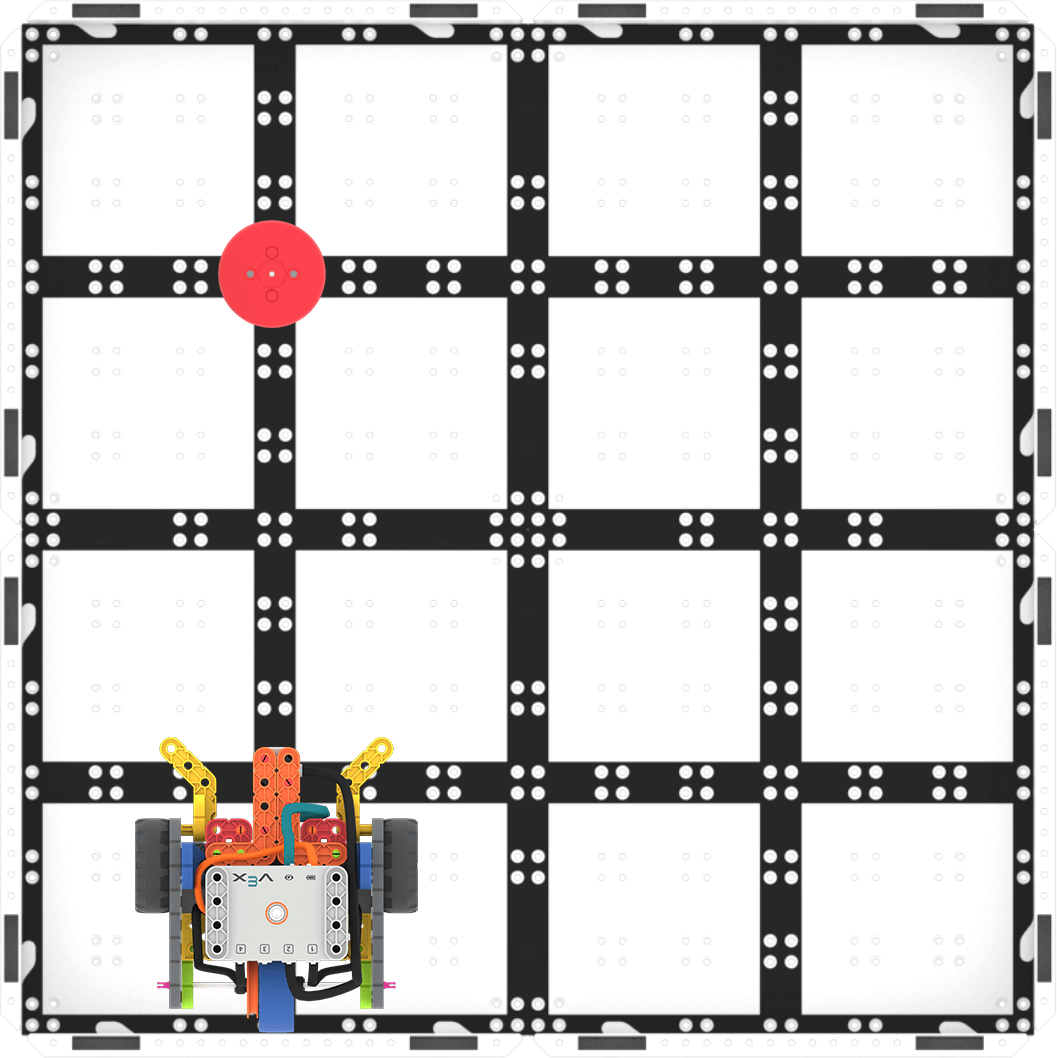 পরীক্ষা করার জন্য
পরীক্ষা করার জন্য সেটআপ করুন -
একবার কোড বেসটি চালু হয়ে গেলে, প্রজেক্টটি পরীক্ষা করতে VEXcode GO-তে 'স্টার্ট' বেছে নিন ।
 প্রকল্পটি পরীক্ষা করতে 'শুরু করুন'
প্রকল্পটি পরীক্ষা করতে 'শুরু করুন' বেছে নিন - প্রকল্পটি বন্ধ করতে শিক্ষার্থীদের VEXcode GO টুলবারে 'স্টপ' বোতামটি নির্বাচন করতে হবে ।
-
- শিক্ষার্থীদের জন্য যাদের তাড়াতাড়ি শেষ হয় এবং অতিরিক্ত চ্যালেঞ্জের প্রয়োজন হয়, তাদের রেড ডিস্ককে আরও দূরে সরিয়ে দিন । তারা কি তাদের কোডটি এমনভাবে সামঞ্জস্য করতে পারবে যাতে কোড বেস ডিস্কটি সংগ্রহ করতে পারে?
- শিক্ষার্থীদের তাদের প্রকল্পগুলি পরীক্ষা করার সময় তাদের সাথে কথোপকথনের সুবিধার্থে সহায়তা করুন ।
- এই প্রকল্পে কোড বেস কীভাবে নড়াচড়া করে?
- কোড বেস কীভাবে জানে কখন ইলেক্ট্রোম্যাগনেটকে শক্তিশালী করতে হবে?
- আমরা কীভাবে রোবটটিকে বেসে ফিরে আসার জন্য কোড করেছিলাম?
ধারণাটির দিকে মনোনিবেশ করুন, নির্ভুলতার দিকে নয় । এই ল্যাবের লক্ষ্য একটি প্রকল্পে ইলেক্ট্রোম্যাগনেট ব্যবহারের ধারণার উপর দৃষ্টি নিবদ্ধ করা । যদি শিক্ষার্থীরা তাদের কোড বেসকে সামান্য ভুলভাবে সাজায়, বা ডিস্কটি এর দিকে গাড়ি চালানোর সময় ঠিক জায়গায় না থাকে, তাহলে তাদের মনে করিয়ে দিন যে ইলেক্ট্রোম্যাগনেট দ্বারা এটি পিক আপ হয়েছে কিনা তা নিশ্চিত করার জন্য ডিস্কটি কিছুটা সরানো ঠিক আছে ।
- মনে করিয়ে দিনশিক্ষার্থীদের মনে করিয়ে দিন যে যদিও এটি একটি ছোট প্রকল্প, তারা ভুল করতে পারে, এবং তাদের প্রকল্পের কাজ সফলভাবে করতে একাধিক চেষ্টা করতে পারে।
- নমুনায় পৌঁছানোর জন্য প্রয়োজনীয় সঠিক দূরত্ব রয়েছে তা নিশ্চিত করতে শিক্ষার্থীদের [ড্রাইভ ফর] ব্লকের প্যারামিটারটি পরীক্ষা করা উচিত ।
- তাদের আরও পরীক্ষা করা উচিত যে [টার্ন ফর] ব্লকের প্যারামিটারটি কোড বেসকে চারদিকে ঘুরিয়ে দেওয়ার জন্য সেট করা আছে ।
শিক্ষার্থীদের তাদের ভুলগুলো মেনে নিতে উৎসাহিত করার জন্য, নিম্নলিখিত প্রশ্নগুলি জিজ্ঞাসা করুন:
- আপনি কি ভুল করেছেন যা আপনাকে নতুন কিছু শিখিয়েছে?
- ল্যাবের কোন অংশটি আপনাকে কঠিন মনে করেছিল?
- শিক্ষার্থীদের বিভিন্ন ধরণের শিলা এবং মাটির নমুনা সম্পর্কে জিজ্ঞাসা করুন যা তারা মনে করে যে অধ্যবসায় রোভার তার মিশনে সংগ্রহ করছে । তারা যদি মঙ্গলের বিজ্ঞানী হতেন, তাহলে তারা কী শিখতে চাইতেন? এটি তদন্ত করার জন্য রোভার কোন সেন্সর ব্যবহার করতে পারে?
মিড-প্লে ব্রেক & গ্রুপ আলোচনা
রেড ডিস্ক সংগ্রহ এবং ফেরত দেওয়ার জন্য প্রতিটি গ্রুপ তাদের কোড বেস কোড করার সাথে সাথে, একটি সংক্ষিপ্ত কথোপকথনের জন্য একত্রিত হন ।
- আমাদের প্রকল্পে ইলেক্ট্রোম্যাগনেট কীভাবে কাজ করে? কোন ব্লকগুলি ইলেক্ট্রোম্যাগনেট নিয়ন্ত্রণ করে?
- আপনি কীভাবে ইলেক্ট্রোম্যাগনেটকে ডিস্কটি ফেলে দিয়েছিলেন?
- আপনার যদি অন্য কোনও জায়গা থেকে ডিস্ক সংগ্রহ করার প্রয়োজন হয় তবে কী হবে? আপনি কীভাবে আপনার প্রকল্পটি পরিবর্তন করতে পারেন? আপনি কোন প্যারামিটারগুলি পরিবর্তন করবেন?
পার্ট 2 - ধাপে ধাপে
- শিক্ষার্থীদের নির্দেশ দিন যে তারা কোড বেস সংগ্রহ করতে এবং একটি নতুন অবস্থান থেকে রেড ডিস্ক ফেরত দেওয়ার জন্য তাদের প্রকল্পগুলিতে পুনরাবৃত্তি করার জন্য প্লে পার্ট 1 এ তারা যা শিখেছে তা প্রয়োগ করতে চলেছে । কোড বেস ড্রাইভটি এই নতুন লোকেশনে রাখতে তারা তাদের প্রকল্পগুলির প্যারামিটার বা ব্লকগুলি পরিবর্তন করতে পারে ।
- শিক্ষার্থীদের নতুন ফিল্ড সেটআপটি দেখান এবং তাদের ২০০ মিলিমিটার (~৮ ইঞ্চি) ড্রাইভ দূরত্ব প্রদান করুন যাতে তারা এই প্রকল্পের কোডের উপর মনোযোগ দিতে পারে।
 পার্ট 2 ফিল্ড সেটআপ
পার্ট 2 ফিল্ড সেটআপ খেলুন -
নিম্নলিখিত অ্যানিমেশনটি একটি সম্ভাব্য উপায় দেখায় যে কোড বেস চ্যালেঞ্জটি সম্পূর্ণ করতে যেতে পারে । রোবটটি রেড ডিস্কে পৌঁছানো পর্যন্ত এগিয়ে যায়, তারপর এটি তার ইলেক্ট্রোম্যাগনেটকে শক্তি দিয়ে এটি তুলে নেয় এবং ঘুরে ফিরে তার শুরুর অবস্থানে ফিরে আসে।
ভিডিও ফাইল
- শিক্ষার্থীদের জন্য মডেল মডেল কীভাবে VEXcode GO-তে তাদের প্রকল্পগুলি দিয়ে শুরু করা যায় ।
- প্রয়োজনে, VEXcode GO-তে কীভাবে তাদের কোড বেসে মস্তিষ্ককে তাদের ডিভাইসে সংযুক্ত করতে হয় তা শিক্ষার্থীদের দেখান । কারণ ডিভাইসগুলির মধ্যে সংযোগের ধাপগুলি পরিবর্তিত হয়, আপনার কম্পিউটার বা ট্যাবলেটের সাথে VEX GO Brain সংযোগ করার জন্য নির্দিষ্ট পদক্ষেপের জন্য VEXcode GO VEX লাইব্রেরির সংযোগকারী নিবন্ধগুলি দেখুন ।
- প্রয়োজনে, "Configure a Code Base VEX Library" প্রবন্ধ থেকেধাপ মডেল করুন এবং নিশ্চিত করুন যে শিক্ষার্থীরা টুলবক্সে ড্রাইভট্রেন ব্লকগুলি দেখতে পাচ্ছে।
- শিক্ষার্থীদের তাদের প্রকল্পের নাম জিও নমুনা 2 রাখুন এবং এটি তাদের ডিভাইসে সেভ করুন । একটি VEXcode GO প্রকল্প সংরক্ষণের জন্য ডিভাইস-নির্দিষ্ট পদক্ষেপের জন্য VEXcode GO VEX লাইব্রেরির খুলুন এবং সংরক্ষণ করুন বিভাগটি দেখুন।
যদি প্রয়োজন হয়, শিক্ষার্থীদের জন্য মডেল কিভাবে মাঠে তাদের প্রকল্প পরীক্ষা করতে হয় ।
- মার্স বেসে কোড বেস স্থাপন করে কীভাবে পরীক্ষার জন্য সেট আপ করতে হয় তা তাদের দেখান । প্রয়োজন হলে উপরের প্লে পার্ট 2 ফিল্ড সেটআপ চিত্রটি দেখুন ।
-
একবার কোড বেসটি চালু হয়ে গেলে, প্রজেক্টটি পরীক্ষা করতে VEXcode GO-তে 'স্টার্ট' বেছে নিন ।
 প্রকল্পটি পরীক্ষা করতে 'শুরু করুন'
প্রকল্পটি পরীক্ষা করতে 'শুরু করুন' বেছে নিন - প্রকল্পটি বন্ধ করার জন্য শিক্ষার্থীদের VEXcode GO টুলবারে 'Stop' বোতামটি নির্বাচন করতে হবে।
শিক্ষার্থীরা যদি তাড়াতাড়ি শেষ করে, তাহলে তাদের মাঠে একটি দ্বিতীয় ডিস্ক রাখুন । তারা কি তাদের রোবটকে কোড করে উভয় নমুনা সংগ্রহ করে ফেরত দিতে পারবে?
- শিক্ষার্থীদের তাদের প্রকল্পগুলি তৈরি এবং পরীক্ষা করার সময় তাদের সাথে কথোপকথন সহজতর করুন, যেমন প্রশ্নগুলি:
- ডিস্ক সংগ্রহের জন্য কোড বেসটি কীভাবে সরানো দরকার? আপনি কি আমাকে আপনার হাত দিয়ে দেখাতে পারেন?
- আপনার কোড বেস নতুন অবস্থান থেকে ডিস্ক সংগ্রহ করার জন্য আপনি আপনার প্রকল্পে কোন ব্লকগুলি যুক্ত করছেন?
- কোড বেসটি নতুন লোকেশনে ডিস্কটি ডেলিভারি করার জন্য আপনি কীভাবে আপনার কোড পরিবর্তন করছেন?
শিক্ষার্থীদের পরীক্ষা এবং ত্রুটির জন্য প্রস্তুত করুন যা পরীক্ষার একটি অন্তর্নিহিত অংশ যা তারা এই চ্যালেঞ্জের সাথে জড়িত হবে । আপনি আপনার শিক্ষার্থীদের সাথে সমস্যা সমাধানের প্রক্রিয়াটির জন্য একটি কাঠামো স্থাপন করতে একটি ভিজ্যুয়াল সহায়ক হিসাবে ব্যাকগ্রাউন্ড পৃষ্ঠা থেকে সমস্যা সমাধান চক্র গ্রাফিকটি ব্যবহার করতে চাইতে পারেন ।
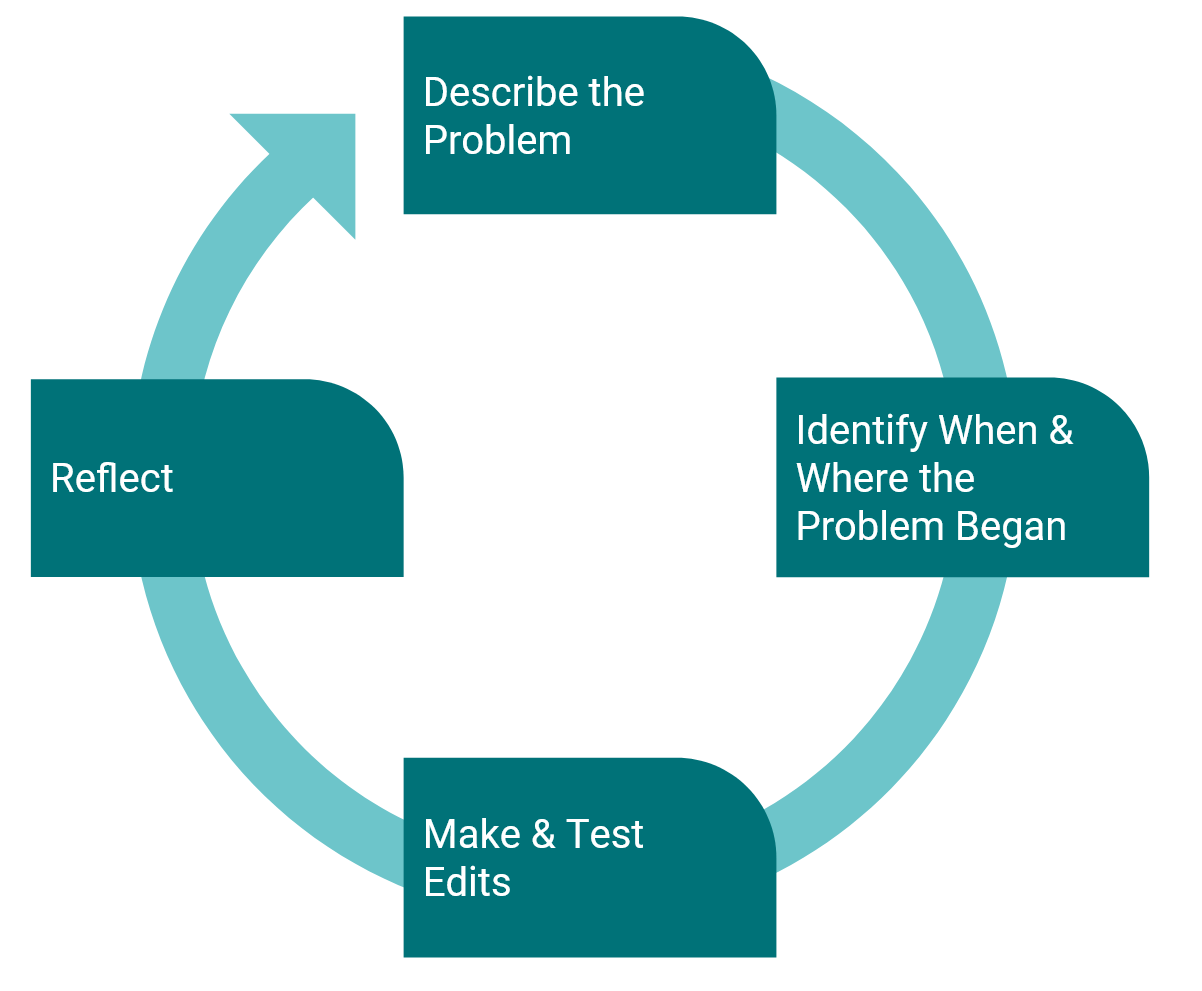
শিক্ষার্থীর সমস্যা সমাধানের চক্র এই চ্যালেঞ্জের জন্য অনেক সম্ভাব্য সমাধান রয়েছে । নীচে একটি উদাহরণ দেওয়া হল ।
 অংশ
অংশ খেলুন 2 সম্ভাব্য সমাধান - ধারণাটির দিকে মনোনিবেশ করুন, নির্ভুলতার দিকে নয় । এই ল্যাবের লক্ষ্য একটি প্রকল্পে ইলেক্ট্রোম্যাগনেট ব্যবহারের ধারণার উপর দৃষ্টি নিবদ্ধ করা । যদি শিক্ষার্থীরা তাদের কোড বেসকে সামান্য ভুলভাবে সাজায়, বা ডিস্কটি এর দিকে গাড়ি চালানোর সময় ঠিক জায়গায় না থাকে, তাহলে তাদের মনে করিয়ে দিন যে ইলেক্ট্রোম্যাগনেট দ্বারা এটি পিক আপ হয়েছে কিনা তা নিশ্চিত করার জন্য ডিস্কটি কিছুটা সরানো ঠিক আছে ।
- যদি শিক্ষার্থীদের তাদের প্রকল্পের ব্লক কমান্ডের সাথে কোড বেসের আচরণগুলিকে সংযুক্ত করার জন্য অতিরিক্ত সহায়তার প্রয়োজন হয়, তাহলে তাদের প্রকল্পে প্রতিটি ব্লক কীভাবে কার্যকর করা হচ্ছে তা দেখতে শিক্ষার্থীদের একবারে তাদের প্রকল্পের এক ব্লকের মধ্য দিয়ে যেতে সহায়তা করার জন্য প্রকল্প পদক্ষেপের বৈশিষ্ট্যটি ব্যবহার করুন । প্রজেক্ট স্টেপিং ফিচারটি কীভাবে ব্যবহার করবেন সে সম্পর্কে আরও তথ্যের জন্য, VEXcode GO-তে স্টেপিং থ্রু ব্লকস টিউটোরিয়াল দেখুন ।

VEXcode GO-তে ব্লক টিউটোরিয়ালের মাধ্যমে পদক্ষেপ নেওয়া - মনে করিয়ে দিনছাত্রদের ব্লকের ক্রম (বা ক্রম) এবং প্রতিটি ব্লক তাদের প্রকল্পে সেট করা পরামিতি পরীক্ষা করতে মনে করিয়ে দিন।
- আপনি আপনার প্রকল্পে কী পরিবর্তন করেছেন এবং কী একই রয়ে গেছে? আপনার গ্রুপে কোন ব্লক বা প্যারামিটার পরিবর্তন করবেন তা আপনি কীভাবে সিদ্ধান্ত নিলেন?
- ডিস্কটি কি বেশি দূরে ছিল বা কম দূরে ছিল? কোড বেস ভ্রমণের জন্য সঠিক দূরত্ব খুঁজে পেতে আপনি কীভাবে [ড্রাইভ ফর] ব্লকের প্যারামিটারটি পরিবর্তন করতে পারেন?
আপনি ক্লাসরুমে ঘোরাঘুরি করার সময় প্রতিটি সমস্যা সমাধানের মাধ্যমে শিক্ষার্থীদের সাথে কথা বলুন । এটি একটি পুনরাবৃত্তিমূলক প্রক্রিয়া হবে, তাই শিক্ষার্থীদের মনে করিয়ে দিন যে মঙ্গলের রোভারগুলি কোড করে এমন বিজ্ঞানীদেরও রোভারটি তাদের উদ্দেশ্য অনুসারে সরানোর জন্য একাধিকবার চেষ্টা করতে হবে ।
- মার্স রোভার সম্পর্কে শিক্ষার্থীদের জিজ্ঞাসা করুন যাতে তারা তাদের প্রকল্পগুলিকে বাস্তব জীবনের রোভারের সাথে সংযুক্ত করতে পারে । কোন সরঞ্জাম বা সেন্সরগুলি তারা মনে করে যে রোভারের কাছে মার্শাল শিলা এবং মাটির নমুনা বিশ্লেষণ করতে সক্ষম?