
রোবট আচরণের ভূমিকা
![]() শিক্ষক টুলবক্স
-
এই বিভাগের উদ্দেশ্য
শিক্ষক টুলবক্স
-
এই বিভাগের উদ্দেশ্য
প্লে সেকশনের লক্ষ্য হল ছাত্ররা [ড্রাইভ] ব্লক ব্যবহার করে সামনের দিকে ড্রাইভ করার জন্য অটোপাইলট রোবটকে প্রোগ্রাম করা শিখতে পারে। প্লে বিভাগ শুরু করার জন্য, শিক্ষার্থীদের প্রোগ্রামিং আচরণের সাথে পরিচয় করিয়ে দেওয়া হয়। এরপরে, শিক্ষার্থীরা একটি অন্বেষণ করবে যেখানে তারা শিখবে কীভাবে অটোপাইলটকে এগিয়ে যেতে এবং বিপরীত করার জন্য প্রোগ্রাম করতে হয়। ফরোয়ার্ড এবং রিভার্স এক্সপ্লোরেশনে যাওয়ার আগে শিক্ষার্থীদের সাথে এই পৃষ্ঠাটি পড়ুন। শিক্ষার্থীদের সাথে পর্যালোচনা করার জন্য আলোচনাকে অনুপ্রাণিত করুন ( Google Doc / .docx / .pdf ) প্রশ্নগুলি ব্যবহার করুন যেগুলি প্রাথমিক আচরণগুলি কী এবং কেন তারা একটি রোবট প্রোগ্রামিং করার জন্য বিল্ডিং ব্লক।
![]() শিক্ষক টুলবক্স
-
রোবট আচরণ
শিক্ষক টুলবক্স
-
রোবট আচরণ
"আচরণ" হল রোবটটি কী করছে এবং এটি কী করতে হবে সে সম্পর্কে কথা বলার একটি খুব সুবিধাজনক উপায়৷ এগিয়ে যাওয়া, থেমে যাওয়া, বাঁক নেওয়া, বাধা খোঁজা… এই সব আচরণ।
ছাত্ররা প্রোগ্রামিং এর কাজ শুরু করার সাথে সাথে তাদের আচরণের ক্ষেত্রে রোবটের ক্রিয়া সম্পর্কেও চিন্তা করা শুরু করা উচিত। যখন শিক্ষার্থীরা প্রোগ্রাম করে, তাদের এই পদক্ষেপগুলি অনুসরণ করা উচিত:
-
প্রথমত, তারা কাঙ্ক্ষিত ক্রিয়া সম্পাদনের জন্য রোবটের জন্য একটি পরিকল্পনা তৈরি করে।
-
এর পরে, তারা সেই পরিকল্পনাটিকে একটি প্রোগ্রামে অনুবাদ করে যা রোবট অনুসরণ করতে পারে।
পরিকল্পনাটি কেবল আচরণের ক্রম হবে যা রোবটকে অনুসরণ করতে হবে এবং প্রোগ্রামটি হবে কেবল সেই আচরণগুলি VEXcode IQ ব্লকগুলিতে অনুবাদ করা।
কাজগুলিকে ছোট ছোট আচরণে ভাগ করা এবং তারপর সেই আচরণগুলির সাথে সমাধান তৈরি করা এমন একটি দক্ষতা যা বিভিন্ন বিষয়ে প্রয়োগ করা যেতে পারে। এটিও কম্পিউটেশনাল থিংকিংয়ের একটি উদাহরণ। কম্পিউটেশনাল থিঙ্কিং সম্পর্কে আরও তথ্যের জন্য, এখানে দেখুন: https://k12cs.org/computational-thinking/
প্রোগ্রামিং জটিলতা
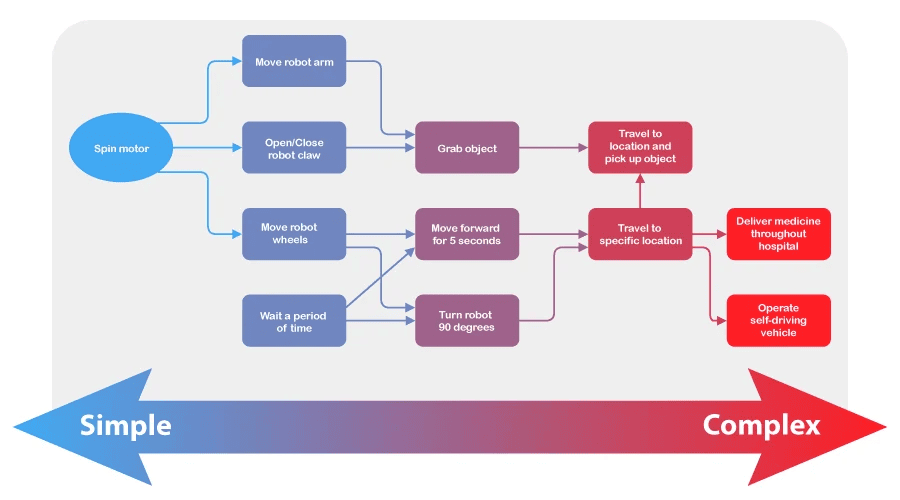
রোবটগুলি বিভিন্ন ধরণের কাজ সম্পাদন করার জন্য ডিজাইন করা যেতে পারে। এর মধ্যে কিছু কাজ খুবই সহজ, যেমন একটি স্বয়ংক্রিয় দরজা খোলা। অন্যগুলি এত সহজ নয়, যেমন একটি রোবট একটি অর্ডারের জন্য আইটেম সংগ্রহ করতে একটি গুদামের চারপাশে ঘুরছে। কাজটি যতই জটিল হোক না কেন, এটিকে আরও সহজে ভাগ করা যেতে পারে। এই কাজগুলি আচরণ হিসাবে পরিচিত এবং রোবোটিক্স প্রোগ্রামিং এর বিল্ডিং ব্লক।
একটি আচরণ হল এমন একটি উপায় যা একটি রোবট কাজ করে এবং রোবটটি কীভাবে তৈরি বা প্রোগ্রাম করা হয়েছে তার উপর নির্ভর করে মৌলিক থেকে জটিল পর্যন্ত হতে পারে। অটোপাইলটের মতো একটি সাধারণ মোবাইল রোবটটিতে কেবল দুটি মোটর রয়েছে, তাই এর আচরণগুলি তার লক্ষ্যগুলি সম্পাদন করতে সেই মোটরগুলিকে ঘুরিয়ে দেওয়া জড়িত। আরও ডিজাইন এবং কোডিং সহ, আপনি এই মৌলিক আচরণ থেকে শুরু করতে পারেন এবং আরও জটিল আচরণ করতে পারেন।
![]() অনুপ্রাণিত আলোচনা
-
মৌলিক ড্রাইভিং
অনুপ্রাণিত আলোচনা
-
মৌলিক ড্রাইভিং
প্রশ্ন: ড্রাইভিং এবং রিভার্স হল মৌলিক আচরণ যা আয়ত্ত করা গুরুত্বপূর্ণ। আপনি যখন গাড়ি চালান তখন আপনি প্রথম যে কাজগুলি শিখেন তা হতে পারে সামনের দিকে এবং বিপরীত দিকে চালনা করা। কেন আপনি মনে করেন যে এই আচরণগুলি প্রথমে শেখা গুরুত্বপূর্ণ?
A: শিক্ষার্থীরা বিভিন্ন প্রতিক্রিয়া দিয়ে উত্তর দিতে পারে, কিন্তু ধারণাটি হল যে আরও কঠিন আচরণের চেষ্টা করার আগে প্রাথমিক আচরণগুলি শিখতে হবে। বড় সংখ্যা যোগ করার সময় কীভাবে ধার নিতে হয় এবং বহন করতে হয় তা শেখার আগে আপনি প্রাথমিক গণিত যোগ এবং বিয়োগের তথ্য শেখার সাথে তুলনা করতে পারেন।
প্রশ্ন: আপনার রোবটের চালিত দূরত্ব পরিমাপ করতে আপনি যে ধরনের ইউনিট ব্যবহার করতে চান তার তালিকা করুন, হয় সামনে বা বিপরীতে। দ্রষ্টব্য: যে কোনো ধরনের ইউনিট গ্রহণযোগ্য!
A: শিক্ষার্থীরা ইঞ্চি, সেন্টিমিটার, ফুট বা মিটারের মতো পরিমাপের যে কোনো এককের সাথে তারা পরিচিত উত্তর দিতে পারে। শিক্ষার্থীরা একটি ডেস্কের দৈর্ঘ্য, একটি নোটবুক বা শ্রেণীকক্ষের মতো ইউনিট দিয়েও উত্তর দিতে পারে।
![]() পরিমাপের একক তুলনা করে আপনার শিক্ষা
-
প্রসারিত করুন
পরিমাপের একক তুলনা করে আপনার শিক্ষা
-
প্রসারিত করুন
এখানে একটি অতিরিক্ত গণিত কার্যকলাপের একটি উদাহরণ। বোর্ডে, পরিমাপের সমস্ত ইউনিট লিখুন শিক্ষার্থীরা বোর্ডে উত্তর দেয়। ছাত্রদের তারপর বোর্ডে ছোট থেকে বড় ইউনিট অর্ডার করতে বলুন। উদাহরণস্বরূপ, চিন্তা করুন এক ইঞ্চি একটি সেন্টিমিটারের চেয়ে বড় কিন্তু একটি ফুট একটি ডেস্কের চেয়ে ছোট। এই উদাহরণটি পরিমাপের সম্পর্কের গুরুত্ব দেখায়। এই উদাহরণগুলির মাধ্যমে, শিক্ষার্থীরা পরবর্তীতে এই ল্যাবে দূরত্ব সম্পর্কে আরও ভাল অনুমান এবং বিচার করতে পারে।