
![]() 教師工具箱
-
本節的目的
教師工具箱
-
本節的目的
玩耍部分的目標是讓學生學習使用 [drive] 塊對 Autopilot 機器人進行編程以向前和向後行駛。 在開始「遊戲」部分時,我們向學生介紹程式設計行為。 接下來,學生將進行探索,學習如何對自動駕駛儀進行編程以使其前進和後退。 在進行正向和反向探索之前,與學生一起閱讀本頁。 使用 激發討論 ( Google Doc / .docx / .pdf ) 問題與學生一起回顧什麼是基本行為以及為什麼它們是機器人編程的構建塊。
![]() 教師工具箱
-
機器人行為
教師工具箱
-
機器人行為
「行為」是談論機器人正在做什麼以及必須做什麼的一種非常方便的方式。 前進、停止、轉彎、尋找障礙物… 這些都是行為。
當學生開始程式設計任務時,他們也應該開始從行為角度思考機器人的動作。 學生編程時應遵循以下步驟:
-
首先,他們制定機器人執行所需動作的計畫。
-
接下來,他們將該計劃轉化為機器人可以遵循的程序。
該計劃只是機器人需要遵循的行為序列,而程式只是將這些行為轉換為 VEXcode IQ 區塊。
將任務分解為更小的行為,然後用這些行為建立解決方案是一項可以應用於許多不同主題的技能。 這也是計算思維的一個例子。 有關計算思維的更多信息,請參見此處: https://k12cs.org/computational-thinking/
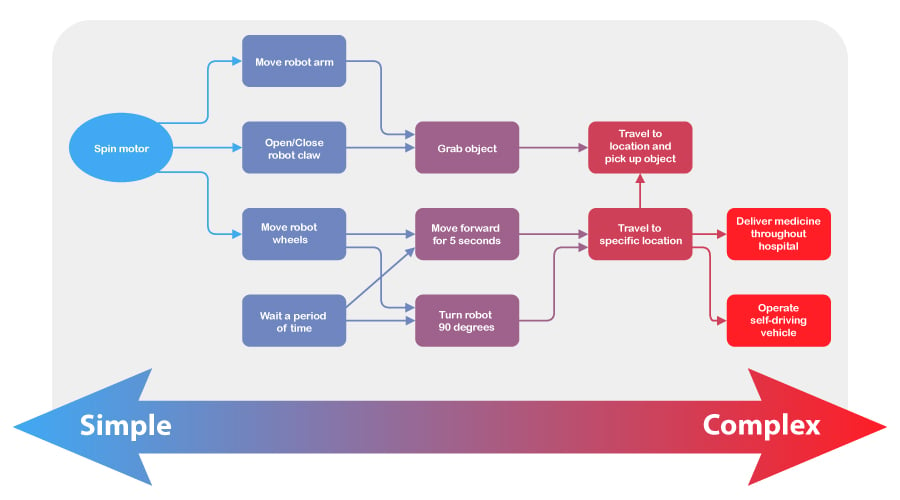
程式設計複雜性
機器人可以被設計來執行許多不同類型的任務。 其中一些任務非常簡單,例如打開自動門。 其他的則沒有那麼簡單,例如機器人在倉庫中移動以收集訂單中的物品。 無論任務有多複雜,都可以分解為更簡單的任務。 這些任務稱為行為,是機器人程式設計的建構塊。
行為是機器人的一種行為方式,可以從基本到複雜,這取決於機器人的建造或程式設計方式。 像自動駕駛儀這樣的簡單移動機器人只有兩個電機,因此它的行為將涉及轉動這些電機來實現其目標。 透過更多的設計和編碼,您可以從這個基本行為開始,做更複雜的行為。
![]() 激發討論
-
基本駕駛
激發討論
-
基本駕駛
問: 前進和倒車是基本行為,必須掌握。 前進和倒車可能是您開車時首先要學習的任務。 為什麼您認為先學習這些行為很重要?
A: 學生可以用多種答案來回答,但我們的想法是,在嘗試更困難的行為之前,先學習基本行為很重要。 您可以將其與先學習基本的數學加法和減法事實進行比較,然後再學習在添加較大數字時如何借用和進位。
Q: 列出您可能想要用來測量機器人向前或向後行駛距離的單位類型。 注意:任何類型的單位都可以!
A: 學生可以使用任何他們熟悉的測量單位來回答,例如英吋、公分、英尺或公尺。 學生也可以用桌子、筆記本或教室的長度等單位來回答。
![]() 擴展您的學習
-
比較測量單位
擴展您的學習
-
比較測量單位
這是額外數學活動的範例。 在黑板上寫下學生答案的所有測量單位。 然後請學生將黑板上的單位從小到大排序。 例如,想像一吋比一公分大,但一英尺比桌子小。 這個例子顯示了測量關係的重要性。 透過這些例子,學生可以在稍後的實驗中對距離做出更好的估計和判斷。