
로봇 행동 소개
![]() 교사 도구 상자
-
이 섹션의 목적
교사 도구 상자
-
이 섹션의 목적
Play 섹션의 목표는 학생들이 [drive] 블록을 사용하여 Autopilot 로봇이 앞뒤로 구동하도록 프로그래밍하는 방법을 배우는 것입니다. 놀이 섹션을 시작하기 위해, 학생들은 프로그래밍 행동에 대해 소개받습니다. 다음으로, 학생들은 오토파일럿을 앞뒤로 움직이도록 프로그래밍하는 방법을 배우는 탐험을 할 것입니다. 전진 및 후진 탐구로 이동하기 전에 학생들과 함께 이 페이지를 읽으십시오. 토론 동기 부여 ( Google Doc/ .docx/ .pdf ) 질문을 사용하여 학생들과 함께 기본적인 행동이 무엇인지, 로봇 프로그래밍의 기본 요소인 이유를 검토합니다.
![]() 교사 도구 상자
-
로봇 행동
교사 도구 상자
-
로봇 행동
"행동" 은 로봇이 무엇을 하고 있는지, 무엇을 해야 하는지에 대해 이야기할 수 있는 매우 편리한 방법입니다. 앞으로 나아가고, 멈추고, 방향을 바꾸고, 장애물을 찾는 것… 모두 행동입니다.
학생들이 프로그래밍 작업을 시작할 때 행동 측면에서 로봇의 행동에 대해서도 생각해야 합니다. 학생들이 프로그램을 진행할 때는 다음 단계를 따라야 합니다.
-
먼저 로봇이 원하는 동작을 수행하기 위한 계획을 수립합니다.
-
그런 다음 해당 계획을 로봇이 따를 수 있는 프로그램으로 변환합니다.
이 계획은 로봇이 따라야 하는 일련의 행동일 뿐이며, 프로그램은 VEXcode IQ 블록으로 변환되는 행동일 뿐입니다.
과제를 더 작은 행동으로 나누고 이러한 행동으로 해결책을 만드는 것은 다양한 주제에 적용할 수 있는 기술입니다. 이것은 또한 계산적 사고의 예이기도 합니다. 계산적 사고에 대한 자세한 내용은 다음을 참조하십시오. https://k12cs.org/computational-thinking/
프로그래밍 복잡성
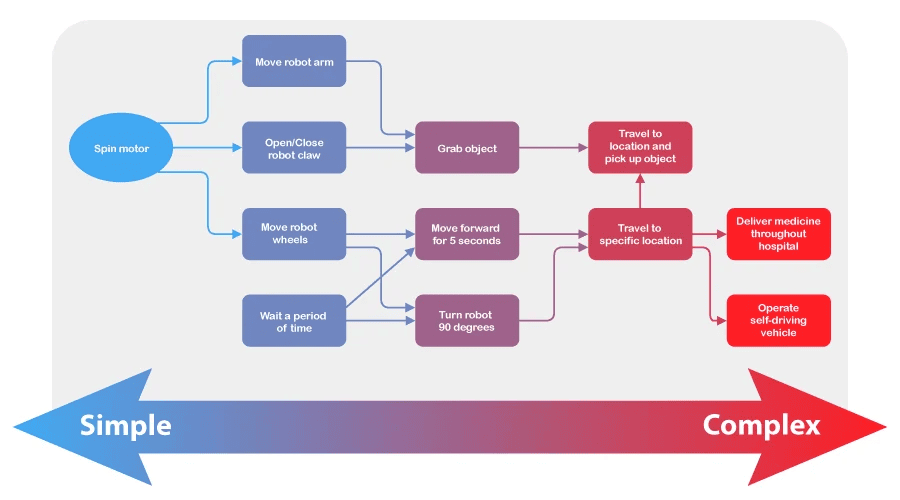
로봇은 다양한 유형의 작업을 수행하도록 설계될 수 있습니다. 이러한 작업 중 일부는 자동 문을 여는 것과 같이 매우 간단합니다. 로봇이 물건을 수거하기 위해 창고를 돌아다니는 것처럼 다른 것들은 그렇게 간단하지 않습니다. 작업이 아무리 복잡하더라도 더 간단한 작업으로 나눌 수 있습니다. 이러한 작업은 행동으로 알려져 있으며 로봇 프로그래밍의 구성 요소입니다.
행동은 로봇이 행동하는 방식이며, 로봇이 구축되거나 프로그래밍되는 방식에 따라 기본적인 것부터 복잡한 것까지 다양할 수 있습니다. 오토파일럿과 같은 간단한 모바일 로봇은 모터가 두 개뿐이므로 모터의 동작에는 목표를 달성하기 위해 모터를 돌리는 것이 포함됩니다. 더 많은 디자인과 코딩을 통해 이러한 기본 동작에서 시작하여 더 복잡한 동작을 수행할 수 있습니다.
![]() 토론 동기 부여
-
기본 운전
토론 동기 부여
-
기본 운전
Q : 전진과 후진은 숙달에 중요한 기본 행동입니다. 앞뒤로 운전하는 것은 자동차를 운전할 때 배우는 첫 번째 작업일 수 있습니다. 이러한 행동을 먼저 배우는 것이 왜 중요하다고 생각하시나요?
A: 학생들은 다양한 답변으로 대답할 수 있지만, 기본적인 행동은 더 어려운 행동을 시도하기 전에 먼저 배우는 것이 중요하다는 생각입니다. 더 큰 수를 더할 때 빌리고 운반하는 방법을 배우기 전에 먼저 기본 수학 덧셈과 뺄셈 사실을 배우는 것과 비교할 수 있습니다.
Q: 로봇의 구동 거리를 측정하는 데 사용할 수 있는 장치 유형을 정방향 또는 역방향으로 나열합니다. 참고: 모든 유형의 숙소는 허용됩니다!
A: 학생들은 인치, 센티미터, 피트 또는 미터와 같이 익숙한 측정 단위로 대답할 수 있습니다. 학생들은 책상, 공책 또는 교실의 길이와 같은 단위로 대답할 수도 있다.
![]() 학습 확대
- 측정 단위
비교
학습 확대
- 측정 단위
비교
다음은 추가 수학 활동의 예입니다. 학생들이 응답하는 모든 측정 단위를 칠판에 적는다. 그런 다음 학생들에게 칠판에 있는 가장 작은 것부터 가장 큰 것까지 순서를 정하라고 한다. 예를 들어, 1 인치는 1 센티미터보다 크지만 1 피트는 책상보다 작다고 생각해보십시오. 이 예는 측정 관계의 중요성을 보여줍니다. 이러한 예제를 통해 학생들은 나중에 이 실습에서 거리에 대해 더 나은 추정과 판단을 내릴 수 있습니다.