
रोबोट व्यवहार का परिचय
![]() शिक्षक टूलबॉक्स
-
इस अनुभाग का उद्देश्य
शिक्षक टूलबॉक्स
-
इस अनुभाग का उद्देश्य
प्ले अनुभाग का लक्ष्य छात्रों को [ड्राइव] ब्लॉक का उपयोग करके ऑटोपायलट रोबोट को आगे और पीछे चलाने के लिए प्रोग्राम करना सिखाना है। प्ले अनुभाग को शुरू करने के लिए, छात्रों को प्रोग्रामिंग व्यवहारों से परिचित कराया जाता है। इसके बाद, छात्र अन्वेषण करेंगे, जिसमें वे सीखेंगे कि ऑटोपायलट को आगे और पीछे जाने के लिए कैसे प्रोग्राम किया जाए। आगे और पीछे की ओर अन्वेषण पर जाने से पहले छात्रों के साथ इस पृष्ठ को पढ़ें। चर्चा को प्रेरित करें ( Google Doc / .docx / .pdf ) प्रश्नों का उपयोग करके विद्यार्थियों के साथ समीक्षा करें कि बुनियादी व्यवहार क्या हैं और वे रोबोट प्रोग्रामिंग के लिए आधारशिला क्यों हैं।
![]() शिक्षक टूलबॉक्स
-
रोबोट व्यवहार
शिक्षक टूलबॉक्स
-
रोबोट व्यवहार
"व्यवहार" यह बताने का एक बहुत ही सुविधाजनक तरीका है कि रोबोट क्या कर रहा है, और उसे क्या करना चाहिए। आगे बढ़ना, रुकना, मुड़ना, किसी बाधा की तलाश करना… सभी व्यवहार हैं।
जैसे ही छात्र प्रोग्रामिंग का कार्य शुरू करते हैं, उन्हें व्यवहार के संदर्भ में रोबोट की गतिविधियों के बारे में भी सोचना शुरू कर देना चाहिए। जब छात्र प्रोग्राम बनाते हैं, तो उन्हें इन चरणों का पालन करना चाहिए:
-
सबसे पहले, वे रोबोट द्वारा वांछित कार्य करने के लिए एक योजना तैयार करते हैं।
-
इसके बाद, वे उस योजना को एक कार्यक्रम में बदल देते हैं जिसका रोबोट अनुसरण कर सकता है।
योजना केवल उन व्यवहारों का अनुक्रम होगी जिसका रोबोट को अनुसरण करना होगा, और कार्यक्रम केवल उन व्यवहारों को VEXcode IQ ब्लॉकों में अनुवादित करेगा।
कार्यों को छोटे-छोटे व्यवहारों में तोड़ना और फिर उन व्यवहारों के आधार पर समाधान तैयार करना एक ऐसा कौशल है जिसे कई अलग-अलग विषयों पर लागू किया जा सकता है। यह भी कम्प्यूटेशनल थिंकिंग का एक उदाहरण है। कम्प्यूटेशनल थिंकिंग के बारे में अधिक जानकारी के लिए, यहां देखें: https://k12cs.org/computational-thinking/
प्रोग्रामिंग जटिलता
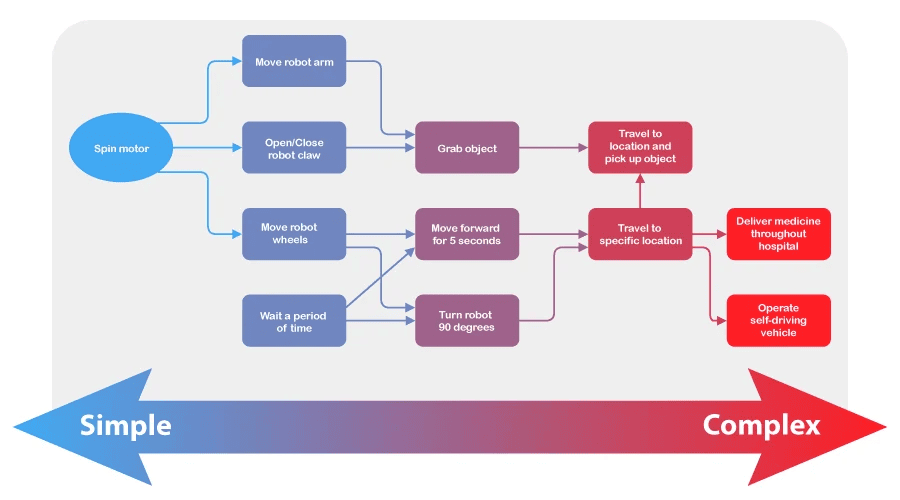
रोबोट को कई अलग-अलग प्रकार के कार्य करने के लिए डिज़ाइन किया जा सकता है। इनमें से कुछ कार्य बहुत सरल हैं, जैसे स्वचालित दरवाजा खोलना। अन्य इतने सरल नहीं हैं, जैसे कि एक रोबोट किसी ऑर्डर के लिए सामान इकट्ठा करने के लिए गोदाम में घूमता रहता है। कार्य चाहे कितना भी जटिल क्यों न हो, उसे सरल कार्यों में तोड़ा जा सकता है। इन कार्यों को व्यवहार के रूप में जाना जाता है और ये रोबोटिक्स प्रोग्रामिंग के निर्माण खंड हैं।
व्यवहार एक तरीका है जिससे रोबोट कार्य करता है, और यह बुनियादी से लेकर जटिल तक हो सकता है, जो इस बात पर निर्भर करता है कि रोबोट कैसे बनाया या प्रोग्राम किया गया है। ऑटोपायलट जैसे सरल मोबाइल रोबोट में केवल दो मोटरें होती हैं, इसलिए इसके व्यवहार में अपने लक्ष्यों को पूरा करने के लिए उन मोटरों को घुमाना शामिल होगा। अधिक डिज़ाइन और कोडिंग के साथ, आप इस बुनियादी व्यवहार से शुरू करके अधिक जटिल व्यवहार कर सकते हैं।
![]() चर्चा को प्रेरित करें
-
बुनियादी ड्राइविंग
चर्चा को प्रेरित करें
-
बुनियादी ड्राइविंग
प्रश्न: आगे और पीछे की ओर वाहन चलाना बुनियादी व्यवहार हैं जिन पर महारत हासिल करना महत्वपूर्ण है। जब आप कार चलाते हैं तो आगे और पीछे चलना पहला काम हो सकता है जो आप सीखते हैं। आपके विचार से इन व्यवहारों को पहले सीखना क्यों महत्वपूर्ण है?
A: विद्यार्थी विभिन्न प्रकार के उत्तर दे सकते हैं, लेकिन विचार यह है कि अधिक कठिन व्यवहारों का प्रयास करने से पहले बुनियादी व्यवहारों को सीखना महत्वपूर्ण है। आप इसकी तुलना बड़ी संख्याओं को जोड़ते समय उधार लेना और ले जाना सीखने से पहले बुनियादी गणित के जोड़ और घटाव के तथ्यों को सीखने से कर सकते हैं।
प्रश्न: उन इकाइयों के प्रकारों की सूची बनाएं जिनका उपयोग आप अपने रोबोट की आगे या पीछे की ओर चलने वाली दूरी को मापने के लिए करना चाहेंगे। नोट: किसी भी प्रकार की इकाई स्वीकार्य है!
उत्तर: छात्र माप की किसी भी इकाई से उत्तर दे सकते हैं जिससे वे परिचित हों, जैसे इंच, सेंटीमीटर, फुट या मीटर। छात्र डेस्क, नोटबुक या कक्षा की लंबाई जैसी इकाइयों के साथ भी उत्तर दे सकते हैं।
![]() अपनी शिक्षा का विस्तार करें
-
माप की इकाइयों की तुलना
अपनी शिक्षा का विस्तार करें
-
माप की इकाइयों की तुलना
यहाँ एक अतिरिक्त गणित गतिविधि का उदाहरण दिया गया है। बोर्ड पर माप की सभी इकाइयाँ लिखें जिनके उत्तर विद्यार्थी देते हैं। फिर विद्यार्थियों से कहें कि वे बोर्ड पर इकाइयों को सबसे छोटी से सबसे बड़ी तक क्रमबद्ध करें। उदाहरण के लिए, सोचिए कि एक इंच एक सेंटीमीटर से बड़ा होता है लेकिन एक फुट एक डेस्क से छोटा होता है। यह उदाहरण मापन संबंधों के महत्व को दर्शाता है। इन उदाहरणों के माध्यम से, छात्र बाद में इस प्रयोगशाला में दूरियों के बारे में बेहतर अनुमान और निर्णय ले सकते हैं।