
റോബോട്ടുകളുടെ പെരുമാറ്റരീതികളെക്കുറിച്ചുള്ള ആമുഖം
![]() അധ്യാപക ഉപകരണപ്പെട്ടി
-
ഈ വിഭാഗത്തിന്റെ ഉദ്ദേശ്യം
അധ്യാപക ഉപകരണപ്പെട്ടി
-
ഈ വിഭാഗത്തിന്റെ ഉദ്ദേശ്യം
[ഡ്രൈവ്] ബ്ലോക്ക് ഉപയോഗിച്ച് ഓട്ടോപൈലറ്റ് റോബോട്ടിനെ മുന്നോട്ടും പിന്നോട്ടും ഓടിക്കാൻ പ്രോഗ്രാം ചെയ്യാൻ വിദ്യാർത്ഥികൾ പഠിക്കുക എന്നതാണ് പ്ലേ വിഭാഗത്തിന്റെ ലക്ഷ്യം. പ്ലേ വിഭാഗം ആരംഭിക്കുന്നതിന്, വിദ്യാർത്ഥികളെ പ്രോഗ്രാമിംഗ് സ്വഭാവരീതികൾ പരിചയപ്പെടുത്തുന്നു. അടുത്തതായി, വിദ്യാർത്ഥികൾ ഒരു പര്യവേക്ഷണം നടത്തും, അവിടെ ഓട്ടോപൈലറ്റ് മുന്നോട്ട് പോകാനും പിന്നോട്ട് പോകാനും എങ്ങനെ പ്രോഗ്രാം ചെയ്യാമെന്ന് അവർ പഠിക്കും. മുന്നോട്ടും പിന്നോട്ടും പര്യവേഷണത്തിലേക്ക് കടക്കുന്നതിന് മുമ്പ് ഈ പേജ് വിദ്യാർത്ഥികളോടൊപ്പം വായിക്കുക. ഒരു റോബോട്ട് പ്രോഗ്രാമിംഗ് ചെയ്യുന്നതിനുള്ള അടിസ്ഥാന സ്വഭാവരീതികൾ എന്താണെന്നും അവ എന്തുകൊണ്ട് അടിസ്ഥാന ഘടകങ്ങളാണെന്നും വിദ്യാർത്ഥികളുമായി അവലോകനം ചെയ്യുന്നതിന് ഒരു ചർച്ചയെ പ്രചോദിപ്പിക്കുക ( Google Doc / .docx / .pdf ) ചോദ്യങ്ങൾ ഉപയോഗിക്കുക.
![]() ടീച്ചർ ടൂൾബോക്സ്
-
റോബോട്ട് പെരുമാറ്റരീതികൾ
ടീച്ചർ ടൂൾബോക്സ്
-
റോബോട്ട് പെരുമാറ്റരീതികൾ
റോബോട്ട് എന്താണ് ചെയ്യുന്നതെന്നും അത് എന്തുചെയ്യണമെന്നും സംസാരിക്കാൻ "പെരുമാറ്റങ്ങൾ" വളരെ സൗകര്യപ്രദമായ ഒരു മാർഗമാണ്. മുന്നോട്ട് നീങ്ങുക, നിർത്തുക, തിരിയുക, ഒരു തടസ്സം തേടുക… ഇവയെല്ലാം പെരുമാറ്റരീതികളാണ്.
വിദ്യാർത്ഥികൾ പ്രോഗ്രാമിംഗ് ആരംഭിക്കുമ്പോൾ, പെരുമാറ്റത്തിന്റെ അടിസ്ഥാനത്തിൽ റോബോട്ടിന്റെ പ്രവർത്തനങ്ങളെക്കുറിച്ച് ചിന്തിക്കാനും തുടങ്ങണം. വിദ്യാർത്ഥികൾ പ്രോഗ്രാം ചെയ്യുമ്പോൾ, അവർ ഈ ഘട്ടങ്ങൾ പാലിക്കണം:
-
ആദ്യം, ആവശ്യമുള്ള പ്രവർത്തനം നടത്തുന്നതിന് റോബോട്ടിനായി അവർ ഒരു പദ്ധതി തയ്യാറാക്കുന്നു.
-
അടുത്തതായി, അവർ ആ പദ്ധതി റോബോട്ടിന് പിന്തുടരാൻ കഴിയുന്ന ഒരു പ്രോഗ്രാമിലേക്ക് വിവർത്തനം ചെയ്യുന്നു.
റോബോട്ട് പിന്തുടരേണ്ട പെരുമാറ്റങ്ങളുടെ ക്രമം മാത്രമായിരിക്കും പ്ലാൻ, കൂടാതെ VEXcode IQ ബ്ലോക്കുകളിലേക്ക് വിവർത്തനം ചെയ്യപ്പെടുന്ന പെരുമാറ്റങ്ങൾ മാത്രമായിരിക്കും പ്രോഗ്രാം.
ജോലികളെ ചെറിയ പെരുമാറ്റരീതികളായി വിഭജിക്കുകയും ആ പെരുമാറ്റരീതികൾ ഉപയോഗിച്ച് പരിഹാരങ്ങൾ നിർമ്മിക്കുകയും ചെയ്യുന്നത് നിരവധി വ്യത്യസ്ത വിഷയങ്ങളിൽ പ്രയോഗിക്കാൻ കഴിയുന്ന ഒരു കഴിവാണ്. ഇതും കമ്പ്യൂട്ടേഷണൽ തിങ്കിംഗിന് ഒരു ഉദാഹരണമാണ്. കമ്പ്യൂട്ടേഷണൽ തിങ്കിംഗിനെക്കുറിച്ചുള്ള കൂടുതൽ വിവരങ്ങൾക്ക്, ഇവിടെ കാണുക: https://k12cs.org/computational-thinking/
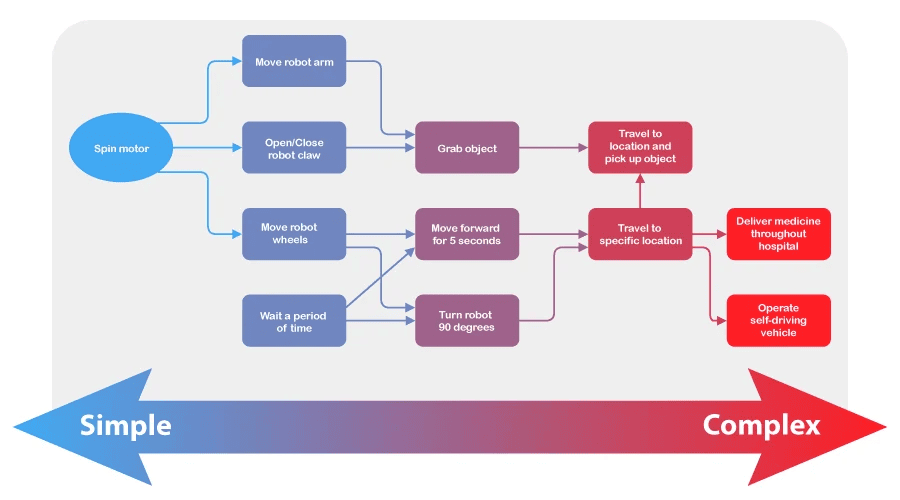
പ്രോഗ്രാമിംഗ് സങ്കീർണ്ണത
പലതരം ജോലികൾ ചെയ്യാൻ റോബോട്ടുകളെ രൂപകൽപ്പന ചെയ്യാൻ കഴിയും. ഇവയിൽ ചില ജോലികൾ വളരെ ലളിതമാണ്, ഒരു ഓട്ടോമാറ്റിക് വാതിൽ തുറക്കുന്നത് പോലെ. മറ്റുള്ളവ അത്ര ലളിതമല്ല, ഒരു ഓർഡറിനായി സാധനങ്ങൾ ശേഖരിക്കാൻ ഒരു വെയർഹൗസിൽ ചുറ്റി സഞ്ചരിക്കുന്ന റോബോട്ട് പോലെ. എത്ര സങ്കീർണ്ണമായ ജോലിയാണെങ്കിലും, അതിനെ ലളിതമായവയായി വിഭജിക്കാം. ഈ ജോലികൾ പെരുമാറ്റങ്ങൾ എന്നറിയപ്പെടുന്നു, അവ റോബോട്ടിക് പ്രോഗ്രാമിംഗിന്റെ നിർമ്മാണ ബ്ലോക്കുകളാണ്.
ഒരു റോബോട്ട് പ്രവർത്തിക്കുന്ന ഒരു രീതിയാണ് പെരുമാറ്റം, റോബോട്ട് എങ്ങനെ നിർമ്മിക്കപ്പെടുന്നു അല്ലെങ്കിൽ പ്രോഗ്രാം ചെയ്യുന്നു എന്നതിനെ ആശ്രയിച്ച് അടിസ്ഥാനം മുതൽ സങ്കീർണ്ണമായത് വരെ വ്യത്യാസപ്പെടാം. ഓട്ടോപൈലറ്റ് പോലുള്ള ഒരു ലളിതമായ മൊബൈൽ റോബോട്ടിന് രണ്ട് മോട്ടോറുകൾ മാത്രമേ ഉള്ളൂ, അതിനാൽ അതിന്റെ പ്രവർത്തനരീതികളിൽ ലക്ഷ്യങ്ങൾ നേടുന്നതിനായി ആ മോട്ടോറുകൾ തിരിക്കുന്നത് ഉൾപ്പെടും. കൂടുതൽ രൂപകൽപ്പനയും കോഡിംഗും ഉപയോഗിച്ച്, നിങ്ങൾക്ക് ഈ അടിസ്ഥാന സ്വഭാവത്തിൽ നിന്ന് ആരംഭിച്ച് കൂടുതൽ സങ്കീർണ്ണമായ പെരുമാറ്റങ്ങൾ ചെയ്യാൻ കഴിയും.
![]() പ്രചോദനാത്മക ചർച്ച
-
അടിസ്ഥാന ഡ്രൈവിംഗ്
പ്രചോദനാത്മക ചർച്ച
-
അടിസ്ഥാന ഡ്രൈവിംഗ്
ചോദ്യം: മുന്നോട്ടും പിന്നോട്ടും ഓടിക്കുന്നത് അടിസ്ഥാന സ്വഭാവരീതികളാണ്, അതിൽ പ്രാവീണ്യം നേടേണ്ടത് പ്രധാനമാണ്. ഒരു കാർ ഓടിക്കുമ്പോൾ നിങ്ങൾ ആദ്യം പഠിക്കുന്നത് മുന്നോട്ടും പിന്നോട്ടും വാഹനമോടിക്കുക എന്നതായിരിക്കാം. ഈ സ്വഭാവരീതികൾ ആദ്യം പഠിക്കേണ്ടത് പ്രധാനമാണെന്ന് നിങ്ങൾ കരുതുന്നത് എന്തുകൊണ്ട്?
എ: വിദ്യാർത്ഥികൾക്ക് വൈവിധ്യമാർന്ന പ്രതികരണങ്ങൾ നൽകാം, എന്നാൽ കൂടുതൽ ബുദ്ധിമുട്ടുള്ള പെരുമാറ്റരീതികൾ പരീക്ഷിക്കുന്നതിന് മുമ്പ് അടിസ്ഥാന സ്വഭാവരീതികൾ ആദ്യം പഠിക്കേണ്ടത് പ്രധാനമാണ് എന്നതാണ് ആശയം. വലിയ സംഖ്യകൾ ചേർക്കുമ്പോൾ കടം വാങ്ങുന്നതും കൊണ്ടുപോകുന്നതും എങ്ങനെയെന്ന് പഠിക്കുന്നതിനുമുമ്പ്, അടിസ്ഥാന ഗണിത സങ്കലന, കുറയ്ക്കൽ വസ്തുതകൾ പഠിക്കുന്നതുമായി നിങ്ങൾക്ക് ഇതിനെ താരതമ്യം ചെയ്യാം.
ചോദ്യം: നിങ്ങളുടെ റോബോട്ടിന്റെ മുന്നോട്ടുള്ള ദൂരം അളക്കാൻ നിങ്ങൾ ഉപയോഗിക്കാൻ ആഗ്രഹിക്കുന്ന യൂണിറ്റുകളുടെ തരം പട്ടികപ്പെടുത്തുക, ഒന്നുകിൽ പിന്നോട്ടോ പിന്നോട്ടോ. കുറിപ്പ്: ഏത് തരം യൂണിറ്റും സ്വീകാര്യമാണ്!
എ: വിദ്യാർത്ഥികൾക്ക് ഇഞ്ച്, സെന്റിമീറ്റർ, അടി, മീറ്റർ എന്നിങ്ങനെ അവർക്ക് പരിചിതമായ ഏത് അളവുകോലുകളും ഉപയോഗിച്ച് ഉത്തരം നൽകാം. വിദ്യാർത്ഥികൾക്ക് ഒരു മേശയുടെ നീളം, ഒരു നോട്ട്ബുക്ക് അല്ലെങ്കിൽ ക്ലാസ് മുറിയുടെ നീളം പോലുള്ള യൂണിറ്റുകൾ ഉപയോഗിച്ചും ഉത്തരം നൽകാം.
![]() നിങ്ങളുടെ പഠനം
-
അളക്കൽ യൂണിറ്റുകൾ താരതമ്യം ചെയ്യുക
നിങ്ങളുടെ പഠനം
-
അളക്കൽ യൂണിറ്റുകൾ താരതമ്യം ചെയ്യുക
ഒരു അധിക ഗണിത പ്രവർത്തനത്തിന്റെ ഒരു ഉദാഹരണം ഇതാ. ബോർഡിൽ, വിദ്യാർത്ഥികൾ പ്രതികരിക്കുന്ന അളവെടുപ്പിന്റെ എല്ലാ യൂണിറ്റുകളും എഴുതുക. തുടർന്ന് ബോർഡിലെ യൂണിറ്റുകൾ ഏറ്റവും ചെറുത് മുതൽ വലുത് വരെ ക്രമീകരിക്കാൻ വിദ്യാർത്ഥികളോട് ആവശ്യപ്പെടുക. ഉദാഹരണത്തിന്, ഒരു ഇഞ്ച് ഒരു സെന്റീമീറ്ററിനേക്കാൾ വലുതാണെന്നും ഒരു കാൽ ഒരു മേശയേക്കാൾ ചെറുതാണെന്നും കരുതുക. ഈ ഉദാഹരണം അളവുകോൽ ബന്ധങ്ങളുടെ പ്രാധാന്യം കാണിക്കുന്നു. ഈ ഉദാഹരണങ്ങളിലൂടെ, വിദ്യാർത്ഥികൾക്ക് പിന്നീട് ഈ ലാബിൽ ദൂരങ്ങളെക്കുറിച്ച് മികച്ച വിലയിരുത്തലുകളും വിധിന്യായങ്ങളും നടത്താൻ കഴിയും.