
![]() Інструменти вчителя
-
Мета цього розділу
Інструменти вчителя
-
Мета цього розділу
Мета розділу Play полягає в тому, щоб студенти навчилися програмувати робота Autopilot для руху вперед і назад за допомогою блоку [drive]. На початку розділу Play студенти знайомляться з поведінкою програмування. Далі учні проведуть дослідження, де вони дізнаються, як запрограмувати автопілот для руху вперед і назад. Прочитайте цю сторінку разом зі студентами, перш ніж переходити до дослідження вперед і назад. Використовуйте запитання Motivate a Discussion ( Google Doc / .docx / .pdf ), щоб переглянути зі студентами, що таке основні моделі поведінки та чому вони є будівельними блоками для програмування робота.
![]() Інструменти вчителя
Поведінка
Інструменти вчителя
Поведінка
«Поведінка» — це дуже зручний спосіб поговорити про те, що робот робить і що він повинен робити. Рух вперед, зупинка, поворот, пошук перешкоди… все це поведінка.
Коли учні починають виконувати завдання програмування, вони також повинні почати думати про дії робота з точки зору поведінки. Під час програмування студенти повинні виконувати такі дії:
-
Спочатку вони формулюють план виконання роботом потрібної дії.
-
Далі вони перетворюють цей план на програму, яку може виконувати робот.
План буде просто послідовністю дій, яких повинен дотримуватися робот, а програма буде просто цією поведінкою, переведеною в блоки VEXcode IQ.
Розбивати завдання на більш дрібні моделі поведінки, а потім будувати рішення на основі цих моделей поведінки — це навичка, яку можна застосовувати до багатьох різних предметів. Це також приклад обчислювального мислення. Додаткову інформацію про обчислювальне мислення див. тут: https://k12cs.org/computational-thinking/
Складність програмування
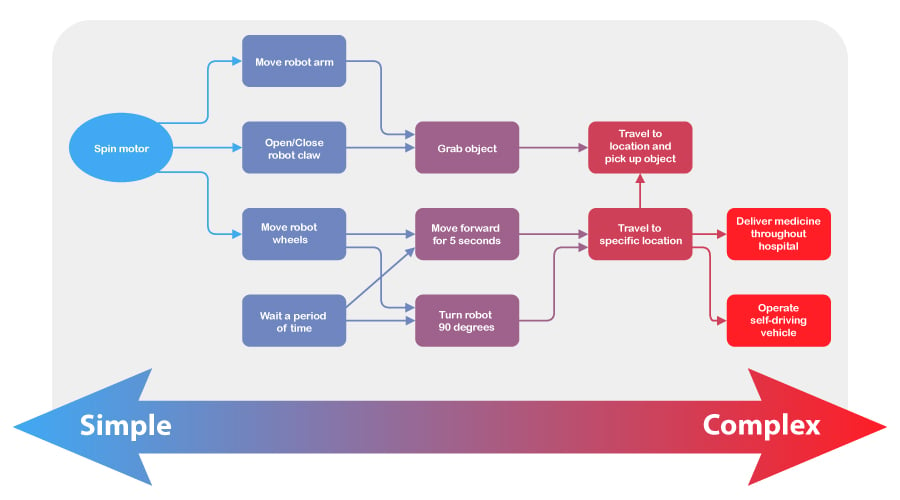
Роботи можуть бути розроблені для виконання багатьох різних типів завдань. Деякі з цих завдань дуже прості, наприклад відкривання автоматичних дверей. Інші не такі прості, як робот, який пересувається по складу, збираючи товари для замовлення. Якою б складною не була задача, її можна розбити на простіші. Ці завдання відомі як поведінка та є будівельними блоками програмування робототехніки.
Поведінка – це спосіб дій робота, який може варіюватися від основного до складного, залежно від того, як робот побудований або запрограмований. Простий мобільний робот, як-от автопілот, має лише два двигуни, тому його поведінка передбачає обертання цих двигунів для досягнення своїх цілей. З розширеним дизайном і програмуванням ви можете починати з цієї базової поведінки та виконувати більш складні поведінки.
![]() Мотивація обговорення
-
Основи водіння
Мотивація обговорення
-
Основи водіння
Q: Їзда вперед і назад є основними способами поведінки, які важливо освоїти. Їзда вперед і назад може бути першим завданням, яке ви вивчаєте, коли керуєте автомобілем. Чому, на вашу думку, важливо спершу навчитися цій поведінці?
A: Студенти можуть відповідати різноманітними відповідями, але ідея полягає в тому, що спочатку важливо навчитися основним правилам поведінки, перш ніж намагатися застосувати більш складну поведінку. Ви можете порівняти це з вивченням основних математичних фактів додавання та віднімання, перш ніж навчитися запозичувати та носити під час додавання більших чисел.
Q: Перелічіть типи одиниць, які ви можете використовувати для вимірювання відстані, пройденої вашим роботом, вперед або назад. Примітка: допускається будь-який тип агрегату!
A: Студенти можуть відповідати будь-якими одиницями вимірювання, які їм знайомі, наприклад, дюйми, сантиметри, фути або метри. Учні також могли відповідати, використовуючи такі одиниці, як довжина столу, зошита або класної кімнати.
![]() Розширте своє вивчення
-
Порівняння одиниць вимірювання
Розширте своє вивчення
-
Порівняння одиниць вимірювання
Ось приклад додаткового завдання з математики. Напишіть на дошці всі одиниці вимірювання, на які учні відповідають. Потім попросіть учнів упорядкувати одиниці на дошці від найменшої до найбільшої. Наприклад, подумайте, що дюйм більший за сантиметр, але фут менший за стіл. Цей приклад показує важливість взаємозв’язків вимірювання. Завдяки цим прикладам студенти зможуть краще оцінювати відстані та судити про відстані пізніше в цій лабораторії.