
Giới thiệu về hành vi của robot
![]() Hộp công cụ dành cho giáo viên
-
Mục đích của phần này
Hộp công cụ dành cho giáo viên
-
Mục đích của phần này
Mục tiêu của phần Play là để học sinh học cách lập trình robot Autopilot để lái về phía trước và ngược lại bằng cách sử dụng khối [drive]. Để bắt đầu phần Play, học sinh được giới thiệu về các hành vi lập trình. Tiếp theo, học sinh sẽ thực hiện một cuộc khám phá, nơi các em sẽ học cách lập trình Autopilot để tiến lên và đảo ngược. Đọc trang này với học viên trước khi chuyển sang phần khám phá Chuyển tiếp và Đảo ngược. Sử dụng các câu hỏi Tạo động lực thảo luận ( Google Doc / .docx / .pdf ) để xem lại với học sinh những hành vi cơ bản là gì và tại sao chúng là nền tảng để lập trình robot.
![]() Hộp công cụ dành cho giáo viên
- Hành vi của
robot
Hộp công cụ dành cho giáo viên
- Hành vi của
robot
"Hành vi" là một cách rất thuận tiện để nói về những gì robot đang làm và những gì nó phải làm. Di chuyển về phía trước, dừng lại, quay lại, tìm kiếm một trở ngại -… đây là tất cả các hành vi.
Khi học sinh bắt đầu nhiệm vụ lập trình, các em cũng nên bắt đầu suy nghĩ về hành động của robot về mặt hành vi. Khi học viên lập trình, các em nên làm theo các bước sau:
-
Đầu tiên, họ xây dựng một kế hoạch để robot thực hiện hành động mong muốn.
-
Tiếp theo, họ chuyển kế hoạch đó thành một chương trình mà robot có thể làm theo.
Kế hoạch sẽ chỉ đơn giản là trình tự các hành vi mà robot cần tuân theo và chương trình sẽ chỉ là những hành vi đó được dịch sang VEXcode IQ Blocks.
Chia nhỏ các nhiệm vụ thành các hành vi nhỏ hơn và sau đó xây dựng các giải pháp với những hành vi đó là một kỹ năng có thể áp dụng cho nhiều đối tượng khác nhau. Đây cũng là một ví dụ về Tư duy tính toán. Để biết thêm thông tin về Tư duy tính toán, hãy xem tại đây: https://k12cs.org/computational-thinking/
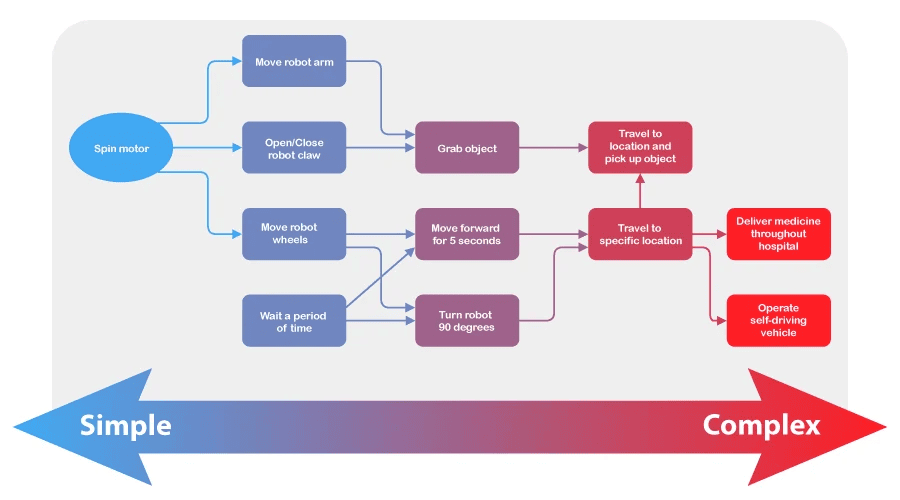
Độ phức tạp của lập trình
Robot có thể được thiết kế để thực hiện nhiều loại nhiệm vụ khác nhau. Một số nhiệm vụ này rất đơn giản, như mở cửa tự động. Những người khác không đơn giản như vậy, giống như một robot di chuyển xung quanh một nhà kho để thu thập các mặt hàng cho một đơn đặt hàng. Cho dù nhiệm vụ có phức tạp đến đâu, nó có thể được chia thành những nhiệm vụ đơn giản hơn. Những nhiệm vụ này được gọi là hành vi và là các khối xây dựng của lập trình robot.
Hành vi là cách mà rô bốt hành động và có thể từ cơ bản đến phức tạp, tùy thuộc vào cách rô bốt được chế tạo hoặc lập trình. Một robot di động đơn giản như Autopilot chỉ có hai động cơ, vì vậy các hành vi của nó sẽ liên quan đến việc biến những động cơ đó để hoàn thành mục tiêu của nó. Với nhiều thiết kế và mã hóa hơn, bạn có thể bắt đầu từ hành vi cơ bản này và thực hiện các hành vi phức tạp hơn.
![]() Thảo luận tạo động lực
- Lái xe
cơ bản
Thảo luận tạo động lực
- Lái xe
cơ bản
H: Tiến lên và lùi lại là những hành vi cơ bản rất quan trọng để làm chủ. Lái xe tiến và lùi có thể là những nhiệm vụ đầu tiên bạn học khi lái xe. Em nghĩ tại sao điều quan trọng là phải học những hành vi này trước tiên?
Đáp: Học sinh có thể trả lời với nhiều câu trả lời khác nhau, nhưng ý tưởng là các hành vi cơ bản rất quan trọng để học trước khi thử các hành vi khó khăn hơn. Bạn có thể so sánh nó với việc học các dữ kiện cộng và trừ toán cơ bản trước khi học cách mượn và mang theo khi cộng các số lớn hơn.
Hỏi: Liệt kê các loại thiết bị bạn có thể muốn sử dụng để đo khoảng cách điều khiển robot của bạn, về phía trước hoặc ngược lại. Lưu ý: bất kỳ loại căn hộ nào cũng được chấp nhận!
Đáp: Học viên có thể trả lời với bất kỳ đơn vị đo lường nào mà các em quen thuộc như inch, cm, feet hoặc mét. Học viên cũng có thể trả lời với các đơn vị như chiều dài của bàn, sổ ghi chép hoặc lớp học.
![]() Mở rộng việc học của bạn
-
So sánh các đơn vị đo lường
Mở rộng việc học của bạn
-
So sánh các đơn vị đo lường
Dưới đây là ví dụ về một hoạt động toán học bổ sung. Trên bảng, viết tất cả các đơn vị đo lường mà học viên trả lời lên trên bảng. Sau đó, yêu cầu học viên sắp xếp các đơn vị trên bảng từ nhỏ nhất đến lớn nhất. Ví dụ, hãy nghĩ về một inch lớn hơn một cm nhưng một bàn chân nhỏ hơn một bàn làm việc. Ví dụ này cho thấy tầm quan trọng của các mối quan hệ đo lường. Thông qua những ví dụ này, học viên có thể ước tính và đánh giá tốt hơn về khoảng cách sau này trong phòng thí nghiệm này.