
Introducción a los comportamientos de los robots
![]() Caja de herramientas para maestros
: el propósito de esta sección
Caja de herramientas para maestros
: el propósito de esta sección
El objetivo de la sección Play es que los estudiantes aprendan a programar el robot Autopilot para avanzar y retroceder utilizando el bloque [Drive]. Para comenzar la sección de Juego, se presenta a los estudiantes los comportamientos de programación. A continuación, los estudiantes realizarán una exploración donde aprenderán a programar el Autopilot para avanzar y retroceder. Lea esta página con los estudiantes antes de pasar a la exploración de avance y retroceso. Utilice las preguntas Motivate a Discussion ( Google Doc / .docx / .pdf ) para repasar con los estudiantes qué son los comportamientos básicos y por qué son los componentes básicos para programar un robot.
![]() Caja de herramientas para maestros
- Comportamientos de
robots
Caja de herramientas para maestros
- Comportamientos de
robots
Los "comportamientos" son una forma muy conveniente de hablar sobre lo que está haciendo el robot y lo que debe hacer. Avanzar, detenerse, girar, buscar un obstáculo, todos… estos son comportamientos.
A medida que los estudiantes comienzan la tarea de programación, también deben comenzar a pensar en las acciones del robot en términos de comportamientos. Cuando los estudiantes programan, deben seguir estos pasos:
-
Primero, formulan un plan para que el robot realice la acción deseada.
-
A continuación, traducen ese plan en un programa que el robot puede seguir.
El plan será simplemente la secuencia de comportamientos que el robot debe seguir, y el programa serán solo aquellos comportamientos traducidos en VEXcode IQ Blocks.
Dividir las tareas en comportamientos más pequeños y luego construir soluciones con esos comportamientos es una habilidad que se puede aplicar a muchos temas diferentes. Este es también un ejemplo de pensamiento computacional. Para obtener más información sobre el pensamiento computacional, consulte aquí: https://k12cs.org/computational-thinking/
Complejidad de programación
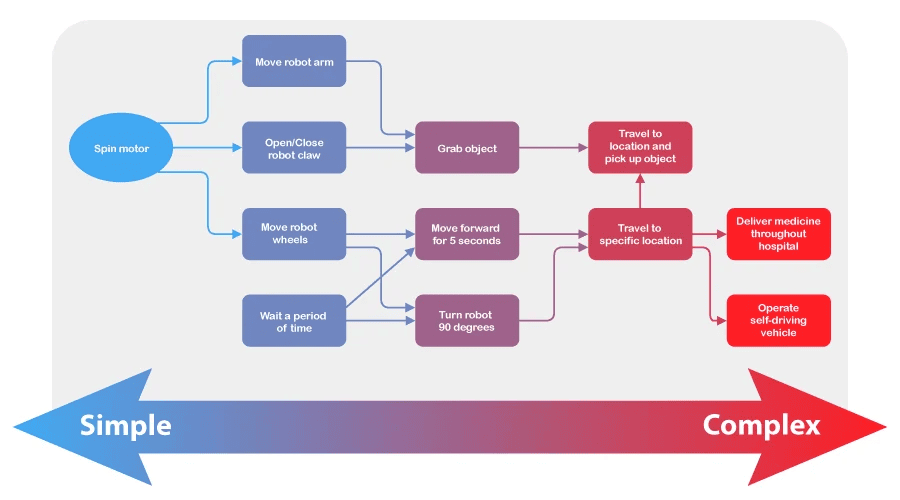
Los robots pueden diseñarse para realizar muchos tipos diferentes de tareas. Algunas de estas tareas son muy simples, como abrir una puerta automática. Otros no son tan simples, como un robot que se mueve por un almacén para recoger artículos para un pedido. No importa lo complicada que sea la tarea, se puede dividir en otras más simples. Estas tareas se conocen como comportamientos y son los componentes básicos de la programación robótica.
Un comportamiento es una forma en que actúa un robot, y puede ir desde lo básico hasta lo complejo, dependiendo de cómo se construya o programe el robot. Un simple robot móvil como el piloto automático solo tiene dos motores, por lo que sus comportamientos implicarán girar esos motores para lograr sus objetivos. Con más diseño y codificación, puede comenzar con este comportamiento básico y hacer comportamientos más complejos.
![]() Motivar la discusión
- Conducción
básica
Motivar la discusión
- Conducción
básica
P: Conducir hacia adelante y hacia atrás son comportamientos básicos que es importante dominar. Conducir hacia adelante y hacia atrás pueden ser las primeras tareas que aprendes cuando conduces un automóvil. ¿Por qué crees que es importante aprender estos comportamientos primero?
R: Los estudiantes podrían responder con una variedad de respuestas, pero la idea es que los comportamientos básicos son importantes para aprender primero antes de que se intenten comportamientos más difíciles. Puede compararlo con aprender operaciones básicas de suma y resta de matemáticas primero antes de aprender a pedir prestado y llevar al sumar números más grandes.
P: Enumere los tipos de unidades que puede utilizar para medir la distancia recorrida por su robot, ya sea hacia adelante o hacia atrás. Nota: ¡cualquier tipo de unidad es aceptable!
R: Los estudiantes podrían responder con cualquier unidad de medida con la que estén familiarizados, como pulgadas, centímetros, pies o metros. Los estudiantes también podrían responder con unidades como la longitud de un escritorio, un cuaderno o el aula.
![]() Amplíe su aprendizaje
:
comparación de unidades de medida
Amplíe su aprendizaje
:
comparación de unidades de medida
Aquí hay un ejemplo de una actividad matemática adicional. En la pizarra, escriba todas las unidades de medida con las que los estudiantes responden en la pizarra. Pida a los estudiantes que ordenen las unidades en la pizarra de menor a mayor. Por ejemplo, piense que una pulgada es más grande que un centímetro, pero un pie es más pequeño que un escritorio. Este ejemplo muestra la importancia de las relaciones de medición. A través de estos ejemplos, los estudiantes pueden hacer mejores estimaciones y juicios sobre las distancias más adelante en esta práctica.