
บทนำเกี่ยวกับพฤติกรรมของหุ่นยนต์
![]() กล่องเครื่องมือสำหรับครู
-
วัตถุประสงค์ของส่วนนี้
กล่องเครื่องมือสำหรับครู
-
วัตถุประสงค์ของส่วนนี้
เป้าหมายของส่วนการเล่นคือเพื่อให้นักเรียนได้เรียนรู้การตั้งโปรแกรมหุ่นยนต์ Autopilot ให้ขับไปข้างหน้าและถอยหลังโดยใช้บล็อก [drive] เพื่อเริ่มส่วนการเล่น นักเรียนจะได้เรียนรู้เกี่ยวกับพฤติกรรมการเขียนโปรแกรม ต่อไป นักเรียนจะได้สำรวจโดยจะได้เรียนรู้วิธีการตั้งโปรแกรมระบบ Autopilot ให้เคลื่อนที่ไปข้างหน้าและถอยหลัง อ่านหน้านี้ร่วมกับนักเรียนก่อนที่จะดำเนินการสำรวจไปข้างหน้าและย้อนกลับ ใช้คำถาม สร้างแรงจูงใจในการอภิปราย ( Google Doc / .docx / .pdf ) เพื่อทบทวนกับนักเรียนว่าพฤติกรรมพื้นฐานคืออะไรและทำไมพฤติกรรมเหล่านี้จึงเป็นพื้นฐานในการเขียนโปรแกรมหุ่นยนต์
![]() กล่องเครื่องมือสำหรับครู
-
พฤติกรรมของหุ่นยนต์
กล่องเครื่องมือสำหรับครู
-
พฤติกรรมของหุ่นยนต์
“พฤติกรรม” เป็นวิธีที่สะดวกมากในการพูดคุยเกี่ยวกับสิ่งที่หุ่นยนต์กำลังทำ และสิ่งที่ต้องทำ การเคลื่อนที่ไปข้างหน้า การหยุด การเลี้ยว การค้นหาสิ่งกีดขวาง… เหล่านี้ล้วนเป็นพฤติกรรม
เมื่อนักเรียนเริ่มงานการเขียนโปรแกรม พวกเขาก็ควรเริ่มคิดเกี่ยวกับการกระทำของหุ่นยนต์ในแง่ของพฤติกรรมด้วย เมื่อนักเรียนทำการเขียนโปรแกรม ควรปฏิบัติตามขั้นตอนเหล่านี้:
-
ขั้นแรกพวกเขาจะต้องวางแผนเพื่อให้หุ่นยนต์ดำเนินการตามที่ต้องการ
-
จากนั้นพวกเขาจะแปลแผนดังกล่าวเป็นโปรแกรมที่หุ่นยนต์สามารถปฏิบัติตามได้
แผนจะเป็นเพียงลำดับพฤติกรรมที่หุ่นยนต์จำเป็นต้องปฏิบัติตาม และโปรแกรมจะเป็นเพียงพฤติกรรมที่แปลเป็น VEXcode IQ Blocks
การแบ่งงานออกเป็นพฤติกรรมย่อยๆ จากนั้นสร้างวิธีแก้ไขด้วยพฤติกรรมเหล่านั้น ถือเป็นทักษะที่สามารถนำไปใช้ได้กับหัวข้อต่างๆ มากมาย นี่ก็เป็นตัวอย่างของความคิดเชิงคำนวณเช่นกัน สำหรับข้อมูลเพิ่มเติมเกี่ยวกับการคิดเชิงคำนวณ โปรดดูที่นี่: https://k12cs.org/computational-thinking/
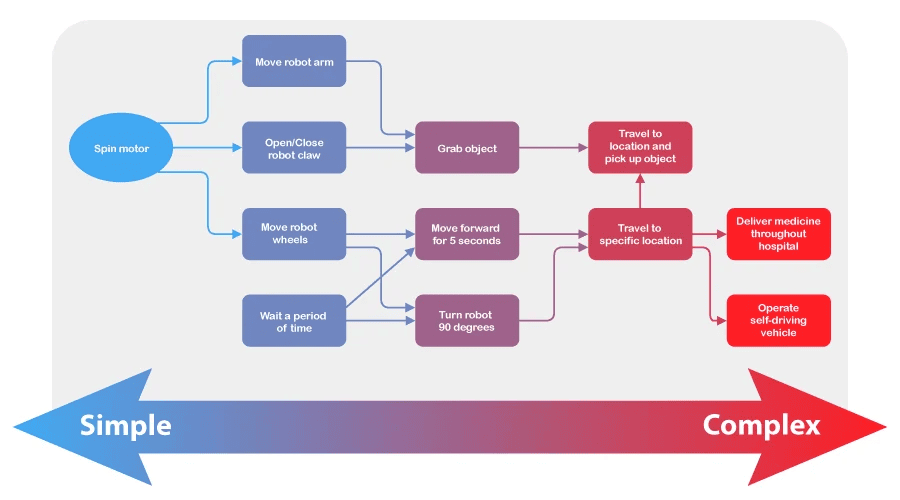
ความซับซ้อนของการเขียนโปรแกรม
หุ่นยนต์สามารถออกแบบให้ทำงานหลายประเภทได้ งานบางอย่างเหล่านี้ง่ายมาก เช่น การเปิดประตูอัตโนมัติ ส่วนอย่างอื่นไม่ง่ายอย่างนั้น เช่น หุ่นยนต์ที่เคลื่อนที่ไปรอบๆ โกดังเพื่อรวบรวมรายการต่างๆ เพื่อสั่งซื้อ ไม่ว่างานจะซับซ้อนเพียงใดก็สามารถแบ่งย่อยออกเป็นงานที่ง่ายกว่าได้ งานเหล่านี้เรียกว่าพฤติกรรมและเป็นส่วนประกอบสำคัญของการตั้งโปรแกรมหุ่นยนต์
พฤติกรรมคือวิธีที่หุ่นยนต์กระทำ และอาจมีตั้งแต่พื้นฐานไปจนถึงซับซ้อน ขึ้นอยู่กับว่าหุ่นยนต์ถูกสร้างหรือตั้งโปรแกรมไว้อย่างไร หุ่นยนต์เคลื่อนที่แบบเรียบง่ายอย่าง Autopilot มีมอเตอร์เพียงสองตัว ดังนั้นพฤติกรรมของหุ่นยนต์จึงต้องหมุนมอเตอร์เหล่านี้เพื่อบรรลุเป้าหมาย ด้วยการออกแบบและการเขียนโค้ดเพิ่มเติม คุณสามารถเริ่มต้นจากพฤติกรรมพื้นฐานนี้และทำพฤติกรรมที่ซับซ้อนยิ่งขึ้นได้
![]() การสนทนาสร้างแรงจูงใจ
-
การขับขี่ขั้นพื้นฐาน
การสนทนาสร้างแรงจูงใจ
-
การขับขี่ขั้นพื้นฐาน
ถาม: การขับไปข้างหน้าและถอยหลังเป็นพฤติกรรมพื้นฐานที่สำคัญที่ต้องฝึกฝน การขับไปข้างหน้าและถอยหลังอาจเป็นงานแรกที่คุณเรียนรู้เมื่อขับรถ คุณคิดว่าทำไมการเรียนรู้พฤติกรรมเหล่านี้ก่อนจึงเป็นเรื่องสำคัญ
ตอบ: นักเรียนอาจตอบได้หลากหลาย แต่แนวคิดก็คือ พฤติกรรมพื้นฐานนั้นมีความสำคัญที่จะต้องเรียนรู้ก่อนที่จะลองทำพฤติกรรมที่ยากขึ้น คุณสามารถเปรียบเทียบได้กับการเรียนรู้การบวกและลบเลขพื้นฐานก่อนที่จะเรียนรู้วิธียืมและการนำไปใช้เมื่อบวกตัวเลขจำนวนมาก
ถาม: ระบุประเภทของหน่วยที่คุณอาจต้องการใช้ในการวัดระยะทางที่หุ่นยนต์ขับเคลื่อนของคุณ ไม่ว่าจะเป็นการเคลื่อนที่ไปข้างหน้าหรือถอยหลัง หมายเหตุ: สามารถใช้หน่วยวัดใดก็ได้!
A: นักเรียนสามารถตอบโดยใช้หน่วยวัดใดๆ ก็ได้ที่ตนคุ้นเคย เช่น นิ้ว เซนติเมตร ฟุต หรือ เมตร นักเรียนสามารถตอบเป็นหน่วยต่างๆ เช่น ความยาวของโต๊ะ สมุดบันทึก หรือห้องเรียน
![]() ขยายการเรียนรู้ของคุณ
-
การเปรียบเทียบหน่วยวัด
ขยายการเรียนรู้ของคุณ
-
การเปรียบเทียบหน่วยวัด
นี่คือตัวอย่างกิจกรรมคณิตศาสตร์เพิ่มเติม บนกระดาน เขียนหน่วยการวัดทั้งหมดให้นักเรียนตอบบนกระดาน จากนั้นขอให้นักเรียนจัดลำดับหน่วยบนกระดานจากเล็กที่สุดไปยังใหญ่ที่สุด ตัวอย่างเช่น ลองคิดดูว่า 1 นิ้วมีขนาดใหญ่กว่า 1 เซนติเมตร แต่ 1 ฟุตมีขนาดเล็กกว่าโต๊ะ ตัวอย่างนี้แสดงให้เห็นความสำคัญของความสัมพันธ์การวัด ผ่านตัวอย่างเหล่านี้ นักเรียนจะสามารถประมาณและตัดสินใจเกี่ยวกับระยะทางได้ดีขึ้นในภายหลังในห้องปฏิบัติการนี้