
![]() 教師用ツールボックス
-
このセクションの目的
教師用ツールボックス
-
このセクションの目的
遊びセクションの目標は、生徒が [ドライブ] ブロックを使用して前進および後進する自動操縦ロボットのプログラムを学習することです。 「遊び」セクションを始めるにあたり、生徒はプログラミング動作を学びます。 次に、学生は探索を行い、自動操縦をプログラムして前進および後進する方法を学びます。 順方向と逆方向の探索に進む前に、生徒と一緒にこのページを読んでください。 ディスカッションの動機付け」 ( Google Doc / .docx / .pdf ) の質問を使用して、基本的な動作とは何か、またそれがロボットのプログラミングの構成要素である理由を生徒と一緒に確認します。
![]() 教師用ツールボックス
-
ロボットの動作
教師用ツールボックス
-
ロボットの動作
「動作」は、ロボットが何をしているのか、また何をしなければならないのかを説明するのに非常に便利な方法です。 進む、止まる、曲がる、障害物を探す… これらはすべて行動です。
学生がプログラミングの作業を始めるときは、ロボットの動作を動作という観点から考え始める必要もあります。 学生がプログラミングを行うときは、次の手順に従う必要があります。
-
まず、ロボットが望ましい動作を実行するための計画を立てます。
-
次に、その計画をロボットが従うことができるプログラムに変換します。
計画は単にロボットが従う必要がある一連の動作であり、プログラムはそれらの動作を VEXcode IQ ブロックに変換したものになります。
タスクを小さな行動に分割し、それらの行動を使用して解決策を構築することは、さまざまな主題に適用できるスキルです。 これも計算論的思考の一例です。 計算論的思考の詳細については、こちらを参照してください: https://k12cs.org/computational-
プログラミングの複雑さ
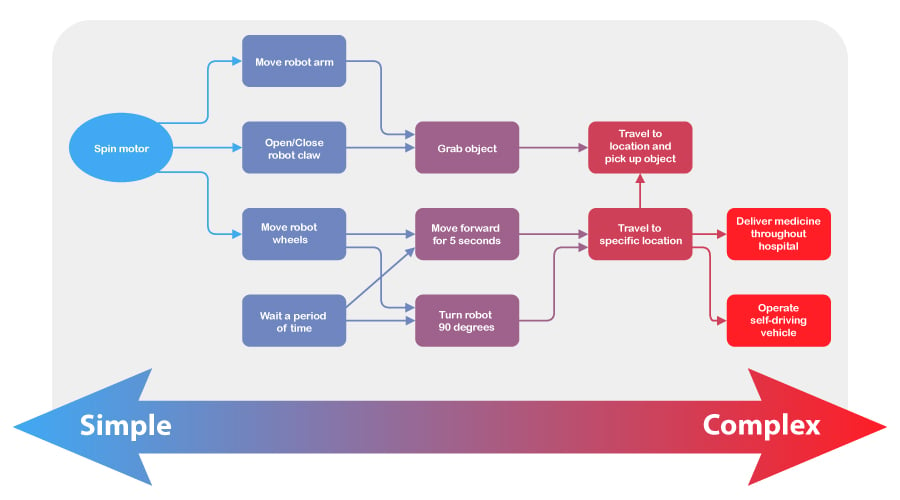
ロボットは、さまざまな種類のタスクを実行するように設計できます。 これらのタスクの中には、自動ドアを開けるなど、非常に単純なものもあります。 注文に応じて商品を集めるために倉庫内を移動するロボットなど、それほど単純ではないものもあります。 どんなに複雑なタスクであっても、より単純なタスクに分解することができます。 これらのタスクは動作として知られており、ロボット プログラミングの構成要素です。
動作はロボットの動作方法であり、ロボットの構築またはプログラムの方法に応じて、基本的なものから複雑なものまで多岐にわたります。 Autopilot のような単純な移動ロボットにはモーターが 2 つしかないため、その動作には目的を達成するためにこれらのモーターを回転させる必要があります。 設計とコーディングをさらに進めると、この基本的な動作から始めて、より複雑な動作を行うことができます。
![]() モチベーションを高めるディスカッション
-
基本的な運転
モチベーションを高めるディスカッション
-
基本的な運転
Q: 前進と後進は基本的な動作であり、習得することが重要です。 前進と後進は、車を運転するときに最初に学ぶ作業かもしれません。 まずこれらの行動を学ぶことが重要なのはなぜだと思いますか?
A: 生徒はさまざまな回答をすることができますが、より難しい行動に挑戦する前に、基本的な行動をまず学ぶことが重要であるという考えです。 これは、より大きな数を足すときの借用と桁上げの方法を学ぶ前に、基本的な数学の加算と減算の事実を学ぶことにたとえることができます。
Q: ロボットの前進または後進の移動距離を測定するために使用する可能性のある単位の種類を挙げてください。 注: どのタイプのユニットでも使用できます。
A: 生徒は、インチ、センチメートル、フィート、メートルなど、よく知っている測定単位で答えることができます。 学生は、机、ノート、教室の長さなどの単位を使って答えることもできます。
![]() 学習を拡張する
-
測定単位の比較
学習を拡張する
-
測定単位の比較
これは追加の数学アクティビティの例です。 生徒が答えるすべての測定単位をホワイトボードに書きます。 次に、ボード上の単位を最小から最大の順に並べるよう生徒に指示します。 たとえば、1 インチは 1 センチメートルよりも大きいですが、1 フィートは机よりも小さいと考えてください。 この例は、測定関係の重要性を示しています。 これらの例を通じて、学生はこのラボの後半で距離についてより適切な推定と判断を行うことができます。