
Introduction to Robot Behaviors
Programming Complexity
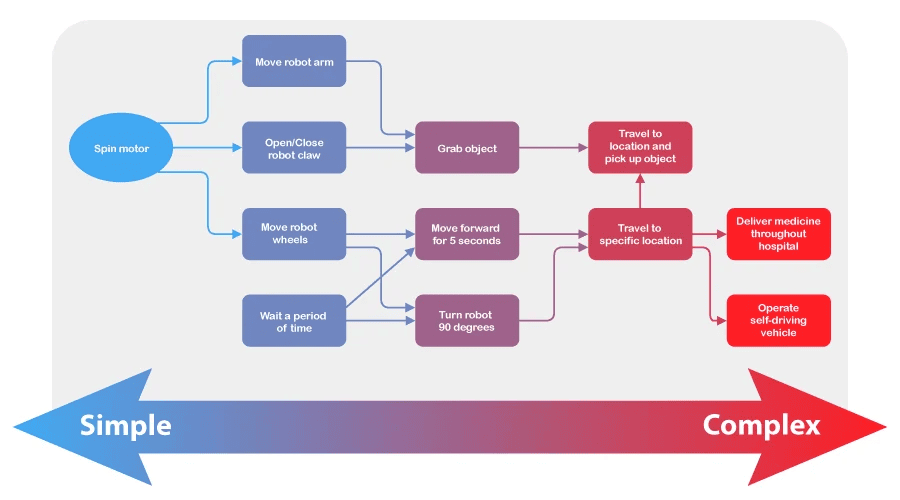
Robots can be designed to perform many different types of tasks. Some of these tasks are very simple, like opening an automatic door. Others are not so simple, like a robot moving around a warehouse to collect items for an order. No matter how complicated the task is, it can be broken down into simpler ones. These tasks are known as behaviors and are the building blocks of robotics programming.
A behavior is a way that a robot acts, and can range from basic to complex, depending on how the robot is built or programmed. A simple mobile robot like the Autopilot only has two motors, so its behaviors will involve turning those motors to accomplish its goals. With more design and coding, you can start from this basic behavior and do more complex behaviors.