
আপনার প্রকল্পে ডিজাইন, ডেভেলপ এবং পুনরাবৃত্তি - পাইথন
আপনার প্রজেক্ট ডিজাইন করার সময় আপনার ইঞ্জিনিয়ারিং নোটবুকে নিম্নলিখিত প্রশ্নের উত্তর দিন ।
- আপনি কি চান এই প্রকল্পে রোবটটি কি করবে? বিস্তারিত বুঝিয়ে বলুন ।
- প্রকল্পটি পরীক্ষা করার জন্য আপনি কোন পদক্ষেপগুলি অনুসরণ করবেন? বিস্তারিত বুঝিয়ে বলুন ।
- আপনার রোবটকে কীভাবে সর্বাধিক নির্ভুলতার সাথে কাজটি সম্পন্ন করার জন্য প্রোগ্রাম করা যেতে পারে? বিস্তারিত বুঝিয়ে বলুন ।
![]() শিক্ষক টুলবক্স
-
উত্তর
শিক্ষক টুলবক্স
-
উত্তর
-
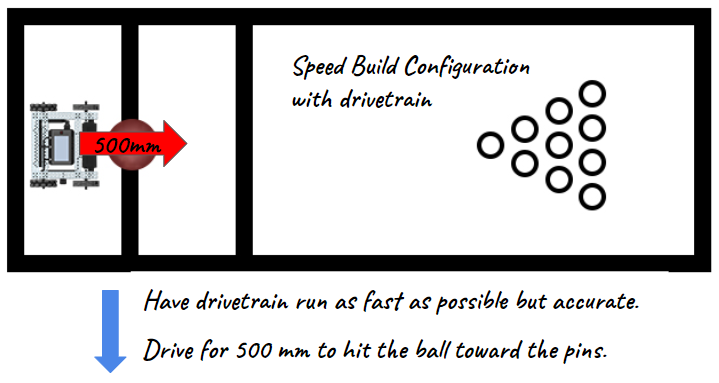
উত্তরের মধ্যে সম্ভবত দ্রুত এবং যথেষ্ট দূরে গাড়ি চালানো অন্তর্ভুক্ত থাকবে যাতে সঠিকতা বজায় রেখে বলটি সর্বোত্তম শক্তির সাথে এগিয়ে যায় এবং এগিয়ে যায়। শিক্ষার্থীদের বল এবং পিনের সংঘর্ষের ফলে রোবটের সংঘর্ষ কীভাবে তাদের পরিকল্পনায় প্রভাব ফেলেছিল তা ব্যাখ্যা করতে বলুন। এটিকে নিউটনের দ্বিতীয় সূত্রের সাথে আবার সংযুক্ত করুন এবং শিক্ষার্থীরা সম্ভবত রোবটটিকে ১০০% বেগে চালানোর জন্য সেট করতে চাইবে। কিন্তু এটাও মনে রাখবেন যে, যদিও রোবটের সর্বোচ্চ বেগ বলের সর্বোচ্চ ত্বরণ এবং পরবর্তীতে সংঘর্ষের পরে পিনগুলিকে সর্বোচ্চ ত্বরণের দিকে পরিচালিত করবে, তবুও রোবটের সর্বোচ্চ বেগ এই চ্যালেঞ্জে নির্ভুলতাকে বিপন্ন করতে পারে। তাদের উভয়ের মধ্যে একটি সমঝোতা খুঁজে বের করতে হবে এবং তারা নীচের নতুন টেবিলটি অথবা তাদের পূর্ববর্তী টেবিলগুলি ব্যবহার করে তথ্য সংগ্রহ করতে এবং এই চ্যালেঞ্জের জন্য সর্বোত্তম বেগ নির্ধারণ করতে পারে।
-
উত্তরের মধ্যে থাকা উচিত সিউডোকোড লেখা, রোবটটির ভ্রমণের জন্য প্রয়োজনীয় দূরত্ব পরিমাপ করা, সেই পরিমাপকে মিলিমিটারে রূপান্তর করা এবং প্রকল্পটি চালানো। প্রোগ্রামিংয়ের জন্য শিক্ষার্থীরা যেন সেন্টিমিটার বা মিটারকে মিলিমিটারে রূপান্তর করতে পারে তা বুঝতে পারে।
-
সেন্টিমিটারকে মিলিমিটারে রূপান্তর করতে পূর্ণ সংখ্যার শেষে শূন্য যোগ করতে হবে। উদাহরণস্বরূপ, ১০ সেমি সমান ১০০ মিমি।
-
মিটারকে মিলিমিটারে রূপান্তর করতে পূর্ণ সংখ্যার শেষে তিনটি শূন্য যোগ করতে হবে। উদাহরণস্বরূপ, ১ মিটার সমান ১০০০ মিমি।
-
-
উত্তরগুলির মধ্যে থাকতে পারে রোবটের শুরুর অবস্থান থেকে বলের শুরুর অবস্থানের সঠিক দূরত্ব পরিমাপ করা এবং সেই পরিমাপ ব্যবহার করে রোবটটির ভ্রমণের জন্য প্রয়োজনীয় সঠিক দূরত্ব নির্ধারণ করা। এছাড়াও, নির্ভুলতা বজায় রেখে গাড়ি চালানোর জন্য সর্বোত্তম বেগ খুঁজে বের করা গুরুত্বপূর্ণ।
আপনার প্রকল্পটি তৈরি করার সময় নিচের ধাপগুলি অনুসরণ করুন:
- আপনি আপনার রোবটকে অঙ্কন এবং ছদ্মকোড (Google / .docx / .pdf) ব্যবহার করে অনুসরণ করতে যে পথটি প্রোগ্রাম করতে চান তা পরিকল্পনা করুন ।
- আপনার প্রকল্প বিকাশের জন্য আপনি যে ছদ্ম কোড তৈরি করেছেন তা ব্যবহার করুন ।
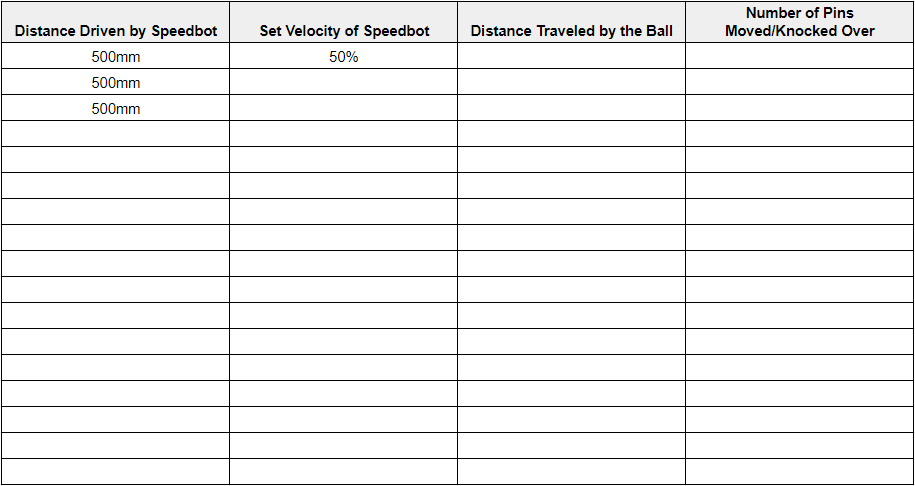
- আপনার প্রকল্পটি প্রায়শই Pythonতে পরীক্ষা করুন এবং আপনার পরীক্ষা থেকে যা শিখেছেন তা ব্যবহার করে এটি পুনরাবৃত্তি করুন। প্রতিটি ট্রায়ালের পরে, রোবটটি কতদূর গাড়ি চালিয়েছিল, বেগ কত নির্ধারণ করা হয়েছিল, বলটি কতদূর ভ্রমণ করেছিল এবং কত পিন সরানো হয়েছিল সে সম্পর্কে রেকর্ড করুন । এখানে ডেটা সংগ্রহ এবং বিশ্লেষণের জন্য একটি আপডেট করা টেবিল রয়েছে ।
![]() শিক্ষকদের টিপস
শিক্ষকদের টিপস
- স্ট্রাইক চ্যালেঞ্জের টেবিলটি এখান থেকে ডাউনলোড এবং প্রিন্ট করা যাবে (গুগল / .পিডিএফ), অথবা শিক্ষার্থীরা তাদের ইঞ্জিনিয়ারিং নোটবুকে টেবিলটি পুনরায় তৈরি করতে পারে।
-
শিক্ষার্থীদের তাদের প্রস্তাবিত পথ পরিমাপ করার জন্য একটি রুলার ব্যবহার করতে বলুন। তারপর, দ্বিতীয় ধাপে যাওয়ার আগে শিক্ষার্থীদের তাদের সিউডোকোড মূল্যায়ন করতে বলুন।
-
শিক্ষার্থীদের তাদের প্রকল্পে মন্তব্য হিসেবে সিউডোকোড ব্যবহার করার নির্দেশ দিন যাতে তারা সংগঠন, প্রবাহ এবং সমস্যা সমাধানে সহায়তা করতে পারে। শিক্ষার্থীদের তাদের প্রকল্পে নির্দেশাবলী যোগ করার আগে তাদের সিউডোকোড মূল্যায়ন করতে বলুন। আপনি এখান থেকে একটি সিউডোকোড রুব্রিক ডাউনলোড করতে পারেন (গুগল / .ডোকএক্স / .পিডিএফ)। শিক্ষার্থীদের চ্যালেঞ্জটি সম্পূর্ণ করতে সাহায্য করার জন্য রেফারেন্সের জন্য নীচের নমুনা কোডটি দেখুন:
# লাইব্রেরি আমদানি থেকে ভেক্স আমদানি * # প্রকল্প কোড শুরু করুন # বলটিকে আরও দূরে ঠেলে দেওয়ার জন্য ড্রাইভের বেগ ৫০ শতাংশের বেশি সেট করুন ড্রাইভট্রেন.সেট_ড্রাইভ_ভেলোসিটি(৬৫, শতাংশ) # বলের সাথে সংঘর্ষের জন্য ৫০০ মিমি এগিয়ে যান ড্রাইভট্রেন.ড্রাইভ_ফর(ফরওয়ার্ড, ৫০০, এমএম) - পরীক্ষার পর্যায় চলতে থাকলে, শিক্ষার্থীদের ডেটা টেবিল পর্যালোচনা করুন এবং গোষ্ঠীগুলিকে ব্যাখ্যা করতে বলুন যে তারা কীভাবে চ্যালেঞ্জের জন্য সর্বোত্তম বেগ বেছে নিয়েছে। তাদের যে দুটি প্রধান ভেরিয়েবলের উপর দৃষ্টি নিবদ্ধ করা উচিত তা হল রোবটের বেগ এবং সরানো পিনের সংখ্যা, তবে বলের আনুমানিক ভ্রমণ দূরত্বও বিবেচনা করা যেতে পারে। আবার, এমন পরীক্ষাকে উৎসাহিত করুন যা একবারে শুধুমাত্র একটি চলককে নিয়ন্ত্রণ করে: রোবটের বেগ।