
Responda às seguintes perguntas em seu caderno de engenharia enquanto elabora seu projeto.
- O que você deseja que o projeto faça com que o robô faça? Explique com detalhes.
- Que etapas você seguirá para testar o projeto? Explique com detalhes.
- Como seu robô pode ser programado para completar a tarefa com maior precisão? Explique com detalhes.
![]() Caixa de ferramentas do professor
-
respostas
Caixa de ferramentas do professor
-
respostas
-
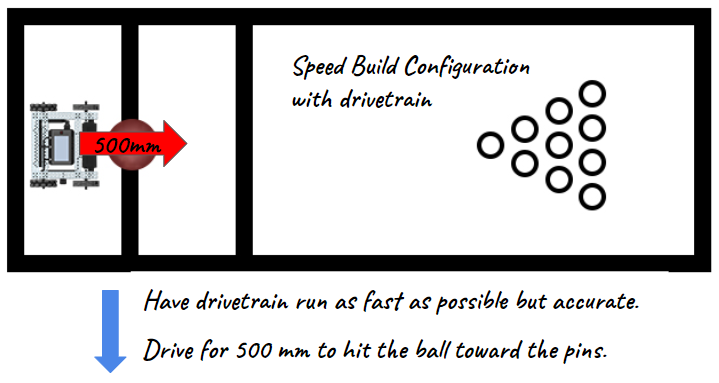
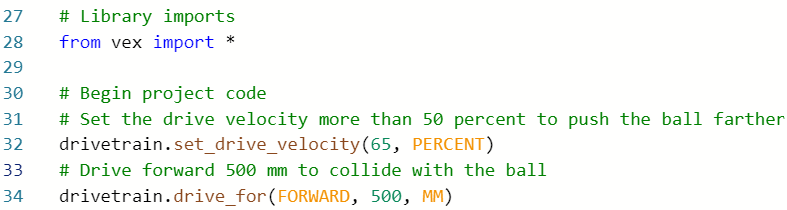
As respostas provavelmente incluirão dirigir rápido e longe o suficiente para alcançar e empurrar a bola para frente com força ideal, mantendo a precisão. Peça aos alunos que expliquem como as colisões do robô com a bola e da bola com os pinos foram levadas em consideração em seus planos. Conecte isso à Segunda Lei de Newton e os alunos provavelmente desejarão configurar o robô para dirigir a 100% da velocidade. Mas destaque que embora a velocidade mais alta para o robô levasse à maior aceleração da bola e subsequentemente dos pinos após a colisão, a velocidade mais alta para o robô poderia comprometer a precisão neste desafio. Eles precisarão encontrar um compromisso entre os dois e poderão usar a nova tabela abaixo ou as tabelas anteriores para coletar dados e decidir a melhor velocidade para este desafio.
-
As respostas devem incluir escrever pseudocódigo, medir a distância que o robô precisa percorrer, converter essa medida em milímetros e executar o projeto. Certifique-se de que os alunos entendam como converter centímetros ou metros em milímetros para programação.
-
A conversão de centímetros em milímetros requer a adição de um zero ao final do número inteiro. Por exemplo, 10cm é igual a 100mm.
-
A conversão de metros em milímetros requer a adição de três zeros ao final do número inteiro. Por exemplo, 1m é igual a 1000mm.
-
-
As respostas podem incluir medir a distância exata do local inicial do robô até a posição inicial da bola e usar essa medição para programar a distância precisa que o robô precisa percorrer. Além disso, é importante encontrar a velocidade ideal para dirigir, mantendo a precisão.
Siga as etapas abaixo ao criar seu projeto:
-
Planeje o caminho você deseja programar seu robô para seguir usando desenhos e pseudocódigo (Google .pdf).
-
Use o pseudocódigo que você criou para desenvolver seu projeto.
-
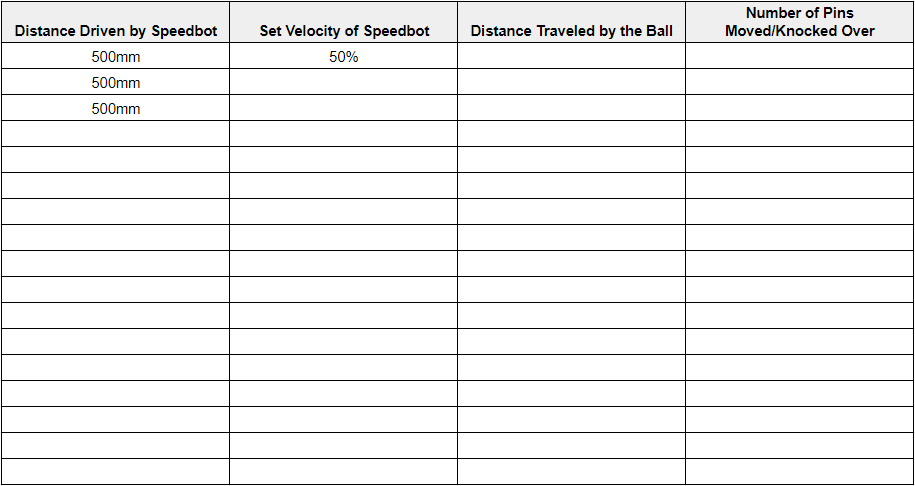
Teste seu projeto em Python com frequência e repita-o usando o que você aprendeu com os testes. Após cada tentativa, registre a distância percorrida pelo robô, a velocidade definida, a distância percorrida pela bola e quantos pinos foram movidos. Aqui está uma tabela atualizada para coleta e análise de dados.
![]() Dicas para professores
Dicas para professores
-
A tabela do Strike Challenge pode ser baixada e impressa aqui (Google ), ou os alunos podem recriar a tabela em seus cadernos de engenharia.
-
Peça aos alunos que usem uma régua para medir o caminho proposto. Em seguida, peça aos alunos que avaliem seu pseudocódigo antes de passar para a segunda etapa.
-
Instrua os alunos a usarem pseudocódigo como comentários em seus projetos para ajudar na organização, fluxo e solução de problemas. Peça aos alunos que avaliem seu pseudocódigo antes de adicionar instruções aos seus projetos. Você pode baixar uma rubrica pseudocódigo aqui (Google .pdf).
-
À medida que a fase de testes continua, revise as tabelas de dados dos alunos e peça aos grupos que expliquem como escolheram a melhor velocidade para o desafio. As duas principais variáveis nas quais eles devem se concentrar são a velocidade do robô e o número de pinos movidos, mas a distância aproximada percorrida pela bola também pode ser considerada. Novamente, incentive testes que manipulem apenas uma variável por vez: a velocidade do robô.