
Kurdami projektą savo inžinerijos bloknote atsakykite į šiuos klausimus.
- Ką norite, kad projektas padarytų robotą? Paaiškinkite su detalėmis.
- Kokius veiksmus atliksite norėdami išbandyti projektą? Paaiškinkite su detalėmis.
- Kaip jūsų robotą galima užprogramuoti taip, kad užduotį atliktų kuo tiksliau? Paaiškinkite su detalėmis.
![]() Mokytojo įrankių rinkinys
-
atsakymai
Mokytojo įrankių rinkinys
-
atsakymai
-
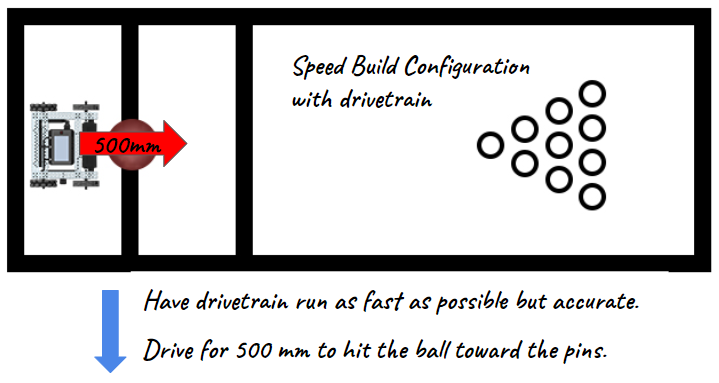
Į atsakymus greičiausiai bus įtrauktas važiavimas greitai ir pakankamai toli, kad pasiektumėte ir stumtumėte kamuolį į priekį su optimalia jėga, išlaikant tikslumą. Paprašykite mokinių paaiškinti, kaip roboto susidūrimai su kamuoliu ir kamuoliuko susidūrimai su kaiščiais buvo įtraukti į jų planus. Prijunkite tai prie antrojo Niutono dėsnio ir studentai greičiausiai norės nustatyti, kad robotas važiuotų 100 % greičiu. Tačiau pabrėžkite, kad nors didžiausias roboto greitis lemtų didžiausią rutulio, o vėliau ir kaiščių pagreitį po susidūrimo, didžiausias roboto greitis gali pakenkti šio iššūkio tikslumui. Jie turės rasti kompromisą tarp šių dviejų ir jie galės naudoti toliau pateiktą naują lentelę arba ankstesnes lenteles, kad rinktų duomenis ir nuspręstų, koks yra geriausias šio iššūkio greitis.
-
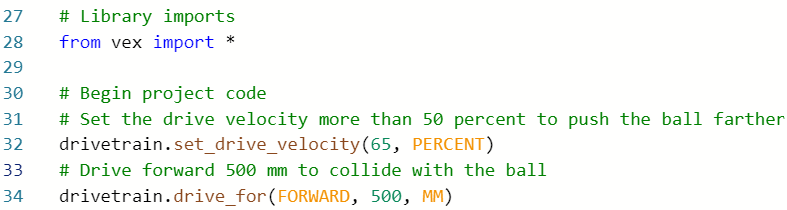
Atsakymai turėtų apimti pseudokodo užrašymą, atstumo, kurį robotas turi nuvažiuoti, išmatavimą, matavimo konvertavimą į milimetrus ir projekto vykdymą. Įsitikinkite, kad mokiniai supranta, kaip programuoti centimetrus ar metrus konvertuoti į milimetrus.
-
Norint konvertuoti centimetrus į milimetrus, viso skaičiaus pabaigoje reikia pridėti nulį. Pavyzdžiui, 10 cm yra lygus 100 mm.
-
Norint konvertuoti metrus į milimetrus, prie viso skaičiaus pabaigos reikia pridėti tris nulius. Pavyzdžiui, 1 m yra lygus 1000 mm.
-
-
Atsakymai galėtų apimti tikslaus atstumo nuo roboto pradžios vietos iki rutulio pradžios vietos išmatavimą ir šio matavimo panaudojimą, norint užprogramuoti tikslų atstumą, kurį robotas turi nuvažiuoti. Taip pat svarbu rasti optimalų važiavimo greitį išlaikant tikslumą.
Kurdami projektą atlikite toliau nurodytus veiksmus.
-
Naudodami brėžinius ir pseudokodą suplanuokite kelią, kuriuo norite užprogramuoti savo robotą eiti (Google ).
-
Kurdami projektą naudokite sukurtą pseudokodą.
-
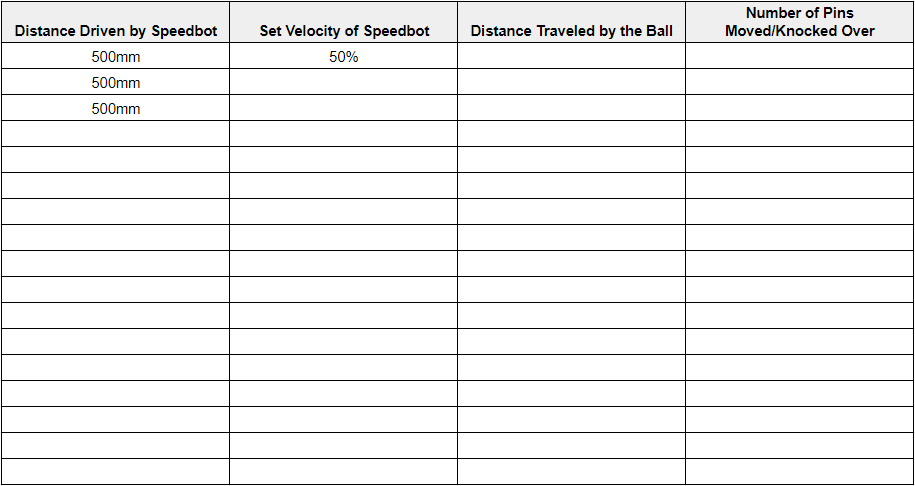
Dažnai išbandykite savo projektą in Python ir kartokite jį naudodami tai, ką išmokote iš testavimo. Po kiekvieno bandymo užrašykite, kiek nuvažiavo robotas, koks buvo nustatytas greitis, kiek toli nukeliavo rutulys ir kiek kaiščių buvo perkelta. Čia yra atnaujinta duomenų rinkimo ir analizės lentelė.
![]() Mokytojo patarimai
Mokytojo patarimai
-
Strike Challenge lentelę galima atsisiųsti ir atsispausdinti iš čia (Google / .pdf), arba studentai gali atkurti lentelę savo inžinerijos sąsiuviniuose.
-
Paprašykite mokinių liniuote išmatuoti siūlomą kelią. Tada paprašykite mokinių įvertinti savo pseudokodą prieš pereidami prie antrojo žingsnio.
-
Nurodykite mokiniams naudoti pseudokodą kaip komentarus savo projekte, kad būtų lengviau organizuoti, eiti ir šalinti triktis. Paprašykite mokinių įvertinti savo pseudokodą prieš įtraukdami instrukcijas į savo projektus. Čia galite atsisiųsti pseudokodo rubriką (Google / .docx / .pdf).
-
Tęsiant testavimo etapą, peržiūrėkite mokinių duomenų lenteles ir paprašykite grupių paaiškinti, kaip jos pasirinko geriausią iššūkio greitį. Du pagrindiniai kintamieji, į kuriuos jie turėtų sutelkti dėmesį, yra roboto greitis ir perkeltų kėglių skaičius, tačiau taip pat galima atsižvelgti į apytikslį rutulio nuvažiuotą atstumą. Vėlgi, skatinkite bandymus, kurie vienu metu valdo tik vieną kintamąjį: roboto greitį.