
Vastaa seuraaviin kysymyksiin suunnittelumuistikirjassasi, kun suunnittelet projektiasi.
- Mitä haluat robotin tekevän projektin? Selitä yksityiskohtaisesti.
- Mitä vaiheita aiot noudattaa testataksesi projektia? Selitä yksityiskohtaisesti.
- Kuinka robotti voidaan ohjelmoida suorittamaan tehtävä mahdollisimman tarkasti? Selitä yksityiskohtaisesti.
![]() Opettajan työkalupakki
-
vastauksia
Opettajan työkalupakki
-
vastauksia
-
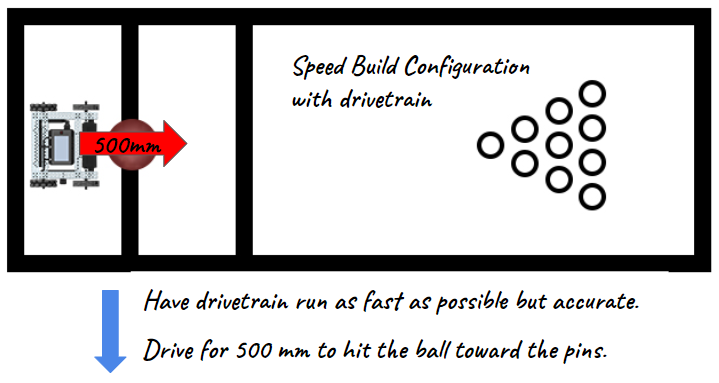
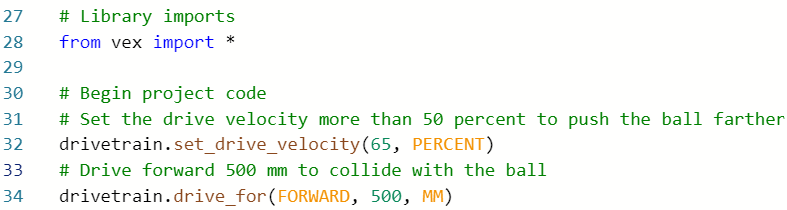
Vastauksiin kuuluu todennäköisesti ajaminen nopeasti ja riittävän pitkälle päästäkseen palloon ja työntääkseen sitä eteenpäin optimaalisella voimalla pitäen samalla tarkkuutta. Pyydä oppilaita selittämään, kuinka robotin törmäykset palloon ja pallon törmäykset keiloihin on otettu huomioon heidän suunnitelmissaan. Yhdistä tämä takaisin Newtonin toiseen lakiin ja opiskelijat haluavat todennäköisesti asettaa robotin ajamaan 100 % nopeudella. Mutta korosta, että vaikka robotin suurin nopeus johtaisi pallon ja myöhemmin tappien suurimpaan kiihtyvyyteen törmäyksen jälkeen, robotin suurin nopeus voisi vaarantaa tarkkuuden tässä haasteessa. Heidän on löydettävä kompromissi näiden kahden välillä, ja he voivat käyttää alla olevaa uutta taulukkoa tai aiempia taulukoitaan kerätäkseen tietoja ja päättääkseen parhaan nopeuden tähän haasteeseen.
-
Vastauksiin tulee kuulua pseudokoodin kirjoittaminen, robotin tarvitseman matkan mittaaminen, mittauksen muuntaminen millimetreiksi ja projektin suorittaminen. Varmista, että opiskelijat ymmärtävät kuinka senttimetrejä tai metrejä muunnetaan millimetreiksi ohjelmointia varten.
-
Senttimetrien muuntaminen millimetreiksi edellyttää nollan lisäämistä kokonaisluvun loppuun. Esimerkiksi 10 cm on yhtä suuri kuin 100 mm.
-
Metrien muuntaminen millimetreiksi edellyttää kolmen nollan lisäämistä kokonaisluvun loppuun. Esimerkiksi 1 m on 1000 mm.
-
-
Vastaukset voisivat sisältää robotin aloituspaikan tarkan etäisyyden mittaamisen pallon lähtöpaikkaan ja tämän mittauksen avulla ohjelmoidaksesi tarkan matkan, jonka robotti tarvitsee kulkea. On myös tärkeää löytää optimaalinen nopeus ajoa varten samalla kun säilytetään tarkkuus.
Noudata alla olevia vaiheita luodessasi projektia:
-
Suunnittele polku, jota haluat ohjelmoida robottisi seuraamaan piirustusten ja pseudokoodin avulla (Google / .docx / .pdf).
-
Käytä luomaasi pseudokoodia projektisi kehittämiseen.
-
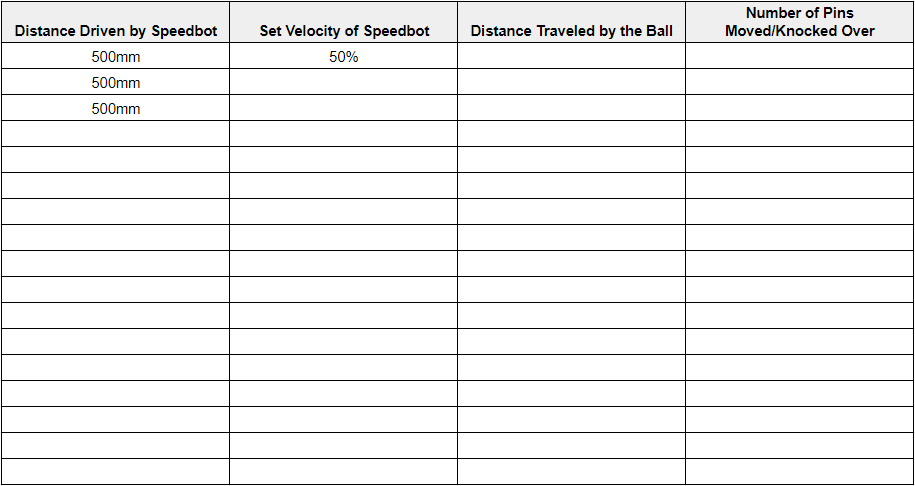
Testaa projektisi in Python usein ja iteroi sitä käyttämällä testauksesta oppimaasi. Kirjaa jokaisen kokeilun jälkeen muistiin, kuinka pitkälle robotti ajoi, mihin nopeus asetettiin, kuinka pitkälle pallo kulki ja kuinka monta keilaa siirrettiin. Tässä on päivitetty taulukko tiedon keräämistä ja analysointia varten.
![]() Opettajan vinkkejä
Opettajan vinkkejä
-
Strike Challengen taulukon voi ladata ja tulostaa täältä (Google / .pdf), tai opiskelijat voivat luoda taulukon uudelleen suunnittelumuistikirjoissaan.
-
Pyydä oppilaita mittaamaan ehdotettua polkua viivaimella. Pyydä oppilaita arvioimaan pseudokoodinsa ennen kuin siirrytään toiseen vaiheeseen.
-
Ohjaa oppilaita käyttämään pseudokoodia kommentteina projektissaan organisoinnin, työnkulun ja vianetsinnän helpottamiseksi. Pyydä oppilaita arvioimaan pseudokoodinsa ennen kuin lisäät ohjeita projekteihinsa. Voit ladata pseudokoodirubriikin tästä (Google / .docx / .pdf).
-
Testausvaiheen edetessä tarkista opiskelijoiden tietotaulukot ja pyydä ryhmiä selittämään, kuinka he valitsivat parhaan nopeuden haasteeseen. Kaksi päämuuttujaa, joihin heidän tulisi keskittyä, ovat robotin nopeus ja siirrettyjen tappien määrä, mutta myös pallon likimääräinen kuljettu etäisyys voidaan ottaa huomioon. Jälleen kannusta testaamaan, joka manipuloi vain yhtä muuttujaa kerrallaan: robotin nopeutta.